Documente Academic
Documente Profesional
Documente Cultură
Unidad 1 Intr Sist Mecanicos
Încărcat de
Fernando Trevizo PizanoDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Unidad 1 Intr Sist Mecanicos
Încărcat de
Fernando Trevizo PizanoDrepturi de autor:
Formate disponibile
Ing. Jaime Eduardo Trejo Aguirre Cap. 1.
Generalidades
Instituto Tecnolgico de Chihuahua 1-1
1.0 Introduccin
En este captulo se presentan las definiciones fundamentales, trminos y conceptos que
utilizaremos en el anlisis y en la sntesis de los mecanismos. Ms que la resolucin matemtica,
analtica o grfica de los mecanismos, es tambin importante entender los conceptos
involucrados en el estudio de los mecanismos. Si bien existen infinidad de conceptos e infinidad
de puntos de vista en estos conceptos, revisaremos los ms utilizados y los suficientes para
entender de forma clara el estudio de los mecanismos.
1.1 Contexto de la cinemtica
La Mecnica es una de las ramas de la Fsica. La Fsica es la ciencia que se ocupa del
anlisis de los movimientos, de las fuerzas presentes en estos movimientos y del tiempo. A la
mecnica la componen la esttica y la dinmica. La esttica es la parte de la mecnica que se
ocupa del estudio de los cuerpos en estado estacionario (no toma en cuenta el movimiento). La
dinmica estudia el movimiento de los cuerpos que cambian con el tiempo y las fuerzas que
actan sobre stos cuerpos y los movimientos provocados por stas. As mismo, la dinmica se
subdivide en dos ramas: la cintica y la cinemtica. La cintica se ocupa del estudio del
movimiento de los cuerpos tomando en cuenta las fuerzas que las provocan. A diferencia de la
cintica, la cinemtica estudia el movimiento de los cuerpos sin importar qu es lo que lo
produce. Vea la figura 1-1.
1.2 Conceptos bsicos
Sntesis de mecanismos (tambin llamado diseo de mecanismos), es el proceso de
dimensionar de forma adecuada las longitudes de los elementos que forman el mecanismo de
manera que satisfaga algn requerimiento de diseo. Las dimensiones sintetizadas dan lugar a
movimientos que han sido previamente definidos. Dado un requerimiento de movimiento
deseado, se dimensionan las partes para satisfacer ese movimiento.
Anlisis de mecanismos, es el proceso de estudiar los movimientos y comportamientos
cinemticos de los elementos de los mecanismos ya existentes. De dimensiones conocidas, se
estudian los movimientos resultantes de acuerdo a una entrada conocida. Este concepto,
llamado grado de libertad, (GDL), se comentar ms adelante.
Mecanismo se le denomina a la combinacin de cuerpos rgidos y resistentes
conectados por medio de articulaciones mviles y de movimiento relativo para formar una
Fig. 1-1 Contexto de la cinemtica.
Mecnica
Esttica Dinmica
Cintica Cinemtica
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-2
cadena cinemtica cerrada, cuyo propsito principal es el de transformar el movimiento. El
estudio de los mecanismos se encarga de entender las relaciones entre la geometra y los
movimientos de las piezas de una mquina o mecanismo y de las fuerzas que generan dichos
movimientos. Un mecanismo es una cadena cinemtica en la cual por lo menos un eslabn ha
sido fijado a una referencia (eslabn fijo). De acuerdo a la definicin descrita, se pueden
establecer como ejemplos de mecanismos a una bicicleta, la cual estar compuesta por el
soporte, denominado cuadro, sobre el cual descansan y se soportan los dems elementos
constituyentes, tales como los manubrios, las ruedas, los pedales y las catarinas las cuales
tendrn la funcin de sumistrar la potencia para promover el movimiento. Otro ejemplo de
mecanismo se encuentra en el dispositivo situado usualmente en la cajuela trasera de los
automviles tipo sedn utilizados para abrir y sostenerla en la posicin de apertura. Este
mecanismo se compone de elementos rgidos conectados entre el chasis del auto y la cajuela
adems de contener ciclindros y pistones encargados de sostener el peso de sta. En las
puertas de edificios pblicos, como escuelas y oficinas pueden encontrarse mecanismos de
retardado de cierre en la puertas de acceso. Tales elementos se encuentran en la parte superior
de la puerta conectando a la pared, como soporte, y a la puerta en s. Pueden encontrarse
tambin mecanismos en las grandes mquinas de servicio pesado como las retroescavadoras,
donde los movimientos requeridos para realizar su operacin, son llevados a cabo por elementos
de soporte y unidos entre s por uniones que permiten un giro y por grandes pistones con
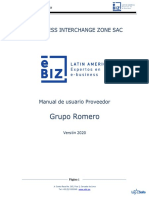
potencia hidrulica para realizar los movimientos de desplazamiento lineal. En la figura 1-2 se
observan los diferentes mecanismos descritos. En el inciso a) se muestra una bicicleta, en b) se
observa un diagrama de una mquina de trabajo pesado mostrando los elementos constitutivos y
en la parte c) se muestra un dispositivo de amortiguamiento de puertas.
Fig. 1-2 Ejemplos de mecanismos.
a) b)
c)
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-3
Mecanismo plano es aqul en que todos los elementos que lo conforman y por ende
toda partcula de los cuerpos se mueven o realizan sus movimientos en un solo plano, o en
planos paralelos. El limpiaparabrisas de los automviles acta solamente sobre el plano del
vidrio del parabrisas, por lo que ste es un ejemplo de un mecanismo plano aunque en realidad
el vidrio tiene una forma curva-. La pala de una mquina retroexcavadora tiene solamente
movimientos hacia arriba y hacia abajo provocados por los pistones hidrulicos. Si no se toma en
consideracin los posibles giros en un eje vertical de la mquina, es decir, considerndola
estacionaria, la pala y los elementos que la mueven slo tendrn movimiento en planos paralelos
y en un sentido vertical. Observe la figura 1-2 b).
Mquina puede definirse como una combinacin de cuerpos resistentes dispuestos de
tal manera para que las fuerzas mecnicas realicen trabajo acompaado por movimientos
determinados. Otra acepcin de mquina: es un mecanismo o coleccin de mecanismos que
transmiten fuerza desde la fuente de energa hasta la resistencia que se debe de vencer.
Algunos autores consideran que una mquina es lo mismo que un mecanismo, otros consideran
que una mquina es una coleccin de mecanismos. Tambin se dice que cuando a un
mecamismo se le considera las fuerzas que provocan un movimiento cualquiera, entonces ese
mecanismo se convierte en una mquina. El vehculo en el que nos transportamos es una
mquina. Como un todo, el automvil se compome de mecanismos de direccin, mecanismos de
frenado, mecanismos de suspensin, mecanismos de bandas para la transmisin de potencia,
mecanismos de transmisin compuesto de conexiones de engranes para llevar la potencia del
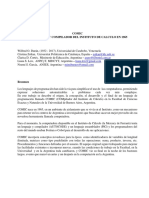
motor hacia las ruedas de traccin. Una turbina de gas es tambin una mquina encargada de la
generacin de suministro elctrico por medio del movimiento de aspas mecnicas. En la figura 1-
3 se muestran estas dos mquinas.
Eslabn se considera un cuerpo rgido susceptible de ser conectado a otro eslabn por
medio de juntas, uniones o pares. Los mecanismos estn compuestos de eslabones. Para fines
del anlisis cinemtico se debe suponer que los elementos rgidos no experimentan deformacin
alguna (contraccin o elongacin), no tienen peso y se consideran sin masa, es decir, son
eslabones ideales. Un eslabn puede tener cualquier forma geomtrica, redonda, cuadrada,
amorfa; la condicin de eslabonamiento indica que con el solo hecho de poderse conectar a otro
y estar en contacto fsico, se produce un par cinemtico. Un sitio geomtrico de sujecin o unin
de un eslabn con otro eslabn se le denomina nodo. Se le conoce como eslabn binario a
Fig. 1-3 Ejemplos de mquinas.
a) Motor de combustin interna. b) Turbina de gas.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-4
aqul susceptible de conectarse con otros dos eslabones, como el de la figura 1-4 a). En la figura
1-4 b) se muestra una biela mostrando sus tres nodos: un nodo superior donde se conecta con el
pistn (no mostrado) y dos nodos ms donde se insertarn los pernos de sujecin y ensamblar la
parte inferior. En la figura 1-4 c) se muestra un eslabn mecnico mostrando 8 nodos.
Pares cinemticos son las formas geomtricas mediante las cuales se unen dos o mas
miembros de un mecanismo entre s de manera que el movimiento entre ellos sea consistente. El
movimiento de un eslabn debe ser relativo a otro. Un eslabn se toma como referencia, sin
movimiento, para posteriormente un segundo eslabn moverse respecto al primero. En seguida
se mencionan los tipos de movimientos resultantes. Los pares son tambin conocidos como
juntas, uniones, elementos de enlace o pares cinemticos.
La clasificacin de los pares puede ser de acuerdo a variados criterios tales como: por la
forma en que se contactan los eslabones, por el nmero de movimientos que permite la junta
(grados de libertad), por la forma geomtrica del cierre de la unin o por el nmero de eslabones
que une. Si la conexin entre dos elementos es de tipo superficial, se clasifica el par como par
inferior. Este contacto puede observarse en un perno uniendo a dos elementos a travs de dos
perforaciones, uno en cada eslabn. El contacto se realiza en el rea externa del perno y el rea
interna de las perforaciones, como se observa en la figura 1-5. Cuando la conexin entre dos
eslabones ocurre a lo largo de una lnea o en un punto, se le llama par superior. Esto ocurre,
Fig. 1-4 Ejemplos de nodos.
a) Eslabn binario.
b) Eslabn ternario.
c) Eslabn de 8 nodos.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-5
por ejemplo, entre dos engranes de tipo recto, donde el contacto sucede a travs del ancho de
los dientes engranados; un contacto de punto, o puntual, sucede en un rodamiento de bolas
donde el elemento rodante, una esfera, est en contacto con la pista externa tanto como la
Seguidor de leva
Fig. 1-6 Pares inferiores.
a) Circunferencias de paso de
engranes rectos.
a) Circunferencias de paso de
engranes helicoidales.
Leva
c) Mecanismo de leva - seguidor.
d) Rodamiento.
Fig. 1-5 Par inferior.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-6
interna en un solo punto. En la figura 1-6 se aprecian los pares de tipo inferior. Los criterios para
clasificar los pares de acuerdo al nmero de movimientos que permite la junta son los siguientes:
si la unin permite un solo tipo de movimiento, tal como una rotacin de un elemento en refencia
a un segundo o una traslacin de un primer elemento con respecto a un segundo, se dice que el
par es de un solo grado de libertad (gdl, por su abreviacin) lo que permite un solo giro. En
esta clasificacin, los primeros dos tipos de pares a mencionar son el par prismtico y el par de
revoluta (llamado tambin par de rotacin). El par prismtico es aqul que slo permite
movimiento lineal relativo de traslacin, y el par de revoluta es aqul que solo permite rotacin
relativa. Una forma de representar al par de revoluta es uniendo por medio de pernos a dos
eslabones donde cada uno de ellos tiene una perforacin buje- donde se establece la unin
mecnica entre los dos. En la figura 1-7 se aprecia un mecanismo de biela manivela, donde en
los puntos A y B se sealan la ubicacin de los pares de revoluta; en la corredera existe el
denominado par prismtico por su caracterstica de movimiento lineal. Si el eslabn, no
importando la forma geomtrica, tiene dos perforaciones, se dice que es un eslabn binario. Si
el eslabn rgido posee tres perforaciones, se le llamar eslabn ternario, si tiene cuatro
perforaciones, ser eslabn cuaternario y as de manera sucesiva en funcin del nmero de
perforaciones contenidas en el cuerpo del eslabn. Cabe mencionar que sta forma de unin es
slo una de las muchas existentes. A cada perforacin se le conoce por el nombre de nodo. La
forma de representacin del par prismtico es una corredera o un pistn donde un elemento de
desliza de forma lineal sobre de, o por dentro de otro. Tanto los pares de revoluta (representado
por la letra R), as como los pares prismticos (representados por la letra P), son tambin pares
inferiores; ambos tipos son de vital importancia en el estudio de los movimientos de mecanismos
planos. Los otros tipos de pares inferiores son los de tornillo o helicoidales (H), los de tipo
cilndrico (C) , los esfricos (S) y los pares inferiores planos (F). Los pares R y P son los bsicos;
los pares H, C, S y F son el resultado de la combinacin de los dos primeros. Si un par mantiene
la unin entre dos eslabones slo con la ayuda de la forma geomtrica de ellos, se dice que el
par tiene un cierre de forma; si el par requiere una ayuda externa, tal como la fuerza de un
resorte para evitar la separacin y asegurar la unin de las partes, se dice que el par tiene un
cierre de fuerza.
Grado de libertad (GDL) se define como el nmero de parmetros independientes
necesarios para definir de forma precisa la posicin u otro parmetro de un elemento de un
sistema en el espacio en cualquier instante. Es el mnimo nmero de parmetros requeridos para
describir la configuracin de un sistema. Los pares cinemticos se clasifican de acuerdo al
nmero de grados de libertad permitidos, al tipo de contacto de los elementos, en funcin del
cierre del par. Pares con un grado de libertad son aquellos pares cuyo movimiento est limitado
a un solo tipo de movimiento. Ejemplo de este tipo de par son los pares de revoluta y los pares
prismticos o de traslacin mostrados en esquema en la figura 1-8. Pares con dos grados de
Par de revoluta
Fig. 1-7 Par de revoluta y par prismtico.
Par de revoluta
Movimiento
Par prismtico
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-7
libertad son los que permiten slo dos tipos de movimiento. Como ejemplo, son aquellos
eslabones que pueden tener un movimiento simultneo de rotacin y traslacin en la direccin
de uno de los eslabones conectados tal y como se observa en la figura 1-9.
A pesar de poder estar en diferentes mecanismos de muy diversa ndole, algunos
elementos estn presentes en la mayora de ellos por la funcin que realizan. Se le llama
manivela a un eslabn que es capaz de realizar una vuelta completa y pivotea con respecto a un
punto fijo. Como ejemplo de manivela tenemos en la figura 1-10 a una catarina (llamada en
ocasiones estrella o pin conductor) en la cual se encuentra unida con una cadena hacia otra
catarina menor que sirve de impulsor en una bicicleta. Un balancn se le llamar al eslabn que
slo tiene una rotacin oscilatoria, de vaivn en cierto intervalo de rotacin. No es capaz de dar
una revolucin completa. Como ejemplo de elementos balancn se puede mencionar a los
limpiaparabrisas del automvil al ser accionados en caso de lluvia. Todo mecanismo debe
contener un eslabn fijo, llamado tambin elemento tierra. Este eslabn fijo es el eslabn
sujeto al espacio, no tiene movimiento y acta como marco de referencia. Este marco de
Fig. 1-10 Manivela.
Fig. 1-9 Ejemplos de pares de 2 grados de libertad.
Fig. 1-8 Ejemplos de pares de 1 grado de libertad.
a) Par de revoluta b) Par prismtico
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-8
referencia, debido a su movilidad cero, ser utilizado para definir los ejes coordenados de
referencia X-Y. Debe existir un sistema de referencia global, nico e inmvil de donde se partir
para establecer los vectores de posicin de puntos de inters en los eslabones del mecanismo.
Puede tambin existir sistemas de referencia secundarios o particulares a uno o ms eslabones,
donde el origen est unido a cualquier punto de inters de cualquier eslabn. Si el eslabn se
traslada o gira, el sistema de referencia secundario seguir el movimiento del eslabn donde
est contenido.
La cadena cinemtica es el resultado de ensamblar eslabones y juntas, interconectadas
de tal manera que proporcionan un movimiento de salida controlado y predecible en respuesta a
un movimiento de entrada conocido y proporcionado. Las cadenas cinemticas pueden ser
cadenas cinemticas abiertas y cadenas cinemticas cerradas. La cadena cinemtica
cerrada es de nuestro particular inters. Estudiaremos estas cadenas porque son las que
proporcionan el movimiento consistente que deseamos en el movimiento de un mecanismo. Este
tipo de cadena se forma al conectar, por ejemplo, un eslabon nmero uno con otro eslabn
nmero dos por medio de sus nodos y un perno. Luego unimos este ltimo con un eslabn
nmero tres tambin por medio de pernos y, por ltimo, unimos el eslabn nmero tres con el
eslabn nmero uno estableciendo un circuito cerrado a travs de sus conexiones. La cadena
cinemtica abierta se construye de la misma manera que la cadena cerrada. Su diferencia
estriba en el momento en que un ltimo eslabn queda sin sujetar a otro y por lo tanto queda
libre. En la figura 1-11 se muestran estos dos tipos de cadenas.
Se le conoce como inversin mecnica al proceso de cambiar de referencia en un
mecanismo. Si un mecanismo cualquiera tiene n eslabones mviles y slo uno fijo; para fines de
anlisis, uno de los n eslabones mviles pasa a ser el eslabn fijo, entonces el que inicialmente
era fijo, se libera, se le permite movimiento, por lo que sus movimientos resultantes han
cambiado; se dice entonces que el mecanismo ha sufrido una inversin mecnica. Habr
entonces tantas inversiones mecnicas de un mecanismo como nmero de eslabones tenga. Por
ejemplo, el mecanismo de 4 barras, tiene 4 posibles eslabones tierra, por cada eslabn que se
fije como tierra, habr un mecanismo diferente, o que es lo mismo, una inversin mecnica
diferente. Para ejemplificar este concepto, nos remitiremos a la figura 1-12 donde aparecen las 4
inversiones del mecanismo de biela manivela. La primera inversin, inciso a), muestra los
siguientes eslabones: con el nmero 1, se denota al eslabn fijo, tal como a la corredera y al
pivote A; el eslabn 2 se muestra como la manivela, el eslabn 3 representa a la biela y,
finalmente, el eslabn 4 representa al pistn. En esta primera inversin, el eslabn 2 se observa
tiene un movimiento de rotacin alrededor del punto A, el eslabn 4 puede moverse de forma
Fig. 1-11 Cadenas cinemticas.
a) Cerrada.
a) Abierta.
Eslabn fijo
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-9
lineal dentro de la corredera 1 por lo que su movimiento es de translacin. El eslabn 3 posee un
movimiento plano. En el inciso b) de la figura 1-12 se observa una segunda inversin producto
del cambio de la funcin del eslabn 1 de la primera inversin que es un elemento fijo a
simplemente permitirle movimiento. Como requisito de un mecanismo, debe existir un elemento
fijo, por lo que el eslabn 2 en el inciso c) toma esta funcin. De la primera inversin a la
segunda, el eslabn 2 pasa de tener movimiento de rotacin a ser un eslabn fijo. De esta
manera, los movimientos resultantes de los eslabones del mecanismo cambian completamente.
A saber, para la segunda inversin el eslabn 1 pasa a tener un movimiento de rotacin, el
eslabn 2 pasa a ser fijo, el eslabn 3 rota sobre el punto B y el pistn 4 se mueve en un
movimiento plano. Si ahora se define al eslabn 3 de la primera inversin como fijo, se obtiene la
tercera inversin mostrada en el inciso c) de la figura 1-12. Ahora los eslabones se comportarn
en sus movimientos de la siguiente manera: el 1 tendr un movimiento plano, el 2 rotar pero
ahora sobre el punto B, el 3 ser la referencia fija y por ltimo, el eslabn 4 girar en su parte
media sobre el punto C. Para lograr la cuarta inversin, se procede ahora a definir como fijo al
eslabn 4 de la primera inversin. Esta inversin se observa en el inciso d) donde ahora el
eslabn 1 se mover en translacin, el eslabn 2 actuar en un movimiento plano, el eslabn 3
girar sobre el punto C del pistn y el eslabn 4 no se mover. De esta manera se enumeraron
las inversiones de un mecanismo y se mostraron los diferentes movimientos resultantes de los
eslabones que lo componen.
A la movilidad tambin se le conoce como el nmero de grados de libertad (GDL) de
un mecanismo. Es el nmero de parmetros que de forma independiente se deben conocer y
controlar para conocer y poder predecir los dems parmetros de un mecanismo. Para poder
conocer la ubicacin o posicin de los eslabones de un mecanismo, debemos primeramente
conocer un valor de una posicin de un eslabn (la entrada conocida), para despus poder ser
capacer de calcular la posicin de los eslabones restantes, es decir, la posicin de los eslabones
sern funcin de la posicin conocida de un eslabn inicial. Puede decirse lo mismo en cuanto a
la velocidad, tanto angular como lineal, de cada punto y eslabn del mecanismo. La velocidad de
los elementos del mecanismo dependern de la velocidad impuesta a un elemento inicial. Lo
mismo aplica para la aceleracin. Para conocer la movilidad de un mecanismo, se utiliza el
Fig. 1-12 Inversin mecnica.
a) Primera inversin. b) Segunda inversin.
c) Tercera inversin. d) Cuarta inversin.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-10
criterio de Kutzbach, con el fin de predecir si la configuracin del mecanismo permite la
movilidad o no en funcin del nmero de eslabones y del nmero de pares de uno y dos grados
de libertad. La expresin para esto est dada por la siguiente ecuacin 1.1:
( )
2 1
j j 2 1 n 3 m = (1.1)
donde n representa el nmero de eslabones del mecanismo, j
1
es el nmero de uniones o pares
con un solo grado de libertad, j
2
representa el nmero de pares con dos grados de libertad y m
es la movilidad del mecanismo. Si el valor de m es igual a 1, entonces significar que el
mecanismo tiene un grado de libertad y por lo tanto ser el nmero de parmetros que se deben
conocer para predecir el comportamiento de los dems parmetros. Si m resulta igual a 2, el
mecanismo ser de dos grados de libertad y deber ser necesario tener dos parmetros como
entrada para conocer el valor de los dems parmetros. Si el valor de m es cero, entonces el
movimiento del mecanismo no ser posible y el mecanismo se convierte en una estructura y ser
no para movimiento sino para soportar cargas. Si la movilidad m es negativa, como -1, el
mecanismo sufrir una precarga una vez ensamblado. En resumen, la movilidad o el grado de
libertad de un sistema ser el nmero de entradas requeridas a fin de originar una salida
predecible y cuantificable. Para la posicin de un mecanismo es el nmero de coordenadas
independientes requeridas para definir de forma completa la posicin de los restantes eslabones
del mecanismo. Para el anlisis de velocidad, es el nmero de velocidades independientes
requeridas para poder conocer y calcular las velocidades de los eslabones restantes del
mecanismo. Para el anlisis de aceleracin, es el nmero de aceleraciones independientes que
se requieren conocer para definir las aceleraciones de los eslabones restantes del mecanismo.
En la figura 1-13 se muestra un mecanismo mostrando numerados a sus eslabones, en total 4.
Adems se muestra el sitio donde se encuentran situados los pares existentes en el mecanismo,
dando por resultado un total de 4 pares, todos de tipo de revoluta. Para aplicar el criterio de
Kutzbach, n =4 eslabones, los pares de revoluta son pares que permiten un solo tipo de
movimiento por lo que son pares de 1 grado de libertad. En este mecanismo no se encuentran
presentes pares de grado 2, por lo que el clculo de movilidad quedara de la siguiente manera:
Fig. 1-13 Calculo de movilidad de un mecanismo.
Par de revoluta
Par de revoluta
Par de revoluta
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-11
n = 4 (4 eslabones)
j
1
= 4 (4 pares de revoluta de gdl = 1)
j
2
= 0 (no hay pares de gdl = 2)
m = 3 (4 1) 2 ( 4 ) 0 = 1
El resultado di el nmero 1. Por primera conclusin tenemos que el mecanismo se
mueve, dado que m > 1. Como segunda conclusin tenemos que se requiere una cantidad igual
al valor de m para poder controlar de manera consistente el movimiento del mecanismo. Esto
significa lo siguiente: si el eslabn 2 del mecanismo de la figura 1-13 se mueve, los eslabones
mviles restantes, 3 y 4, se movern en funcin del movimiento del eslabn 2. Por otra parte, si
se decide que el eslabn 4 sea el de control, entonces los eslabones 2 y 3 se movern siguiendo
el movimiento del eslabn 4. Es posible tambin proporcionar un movimiento de entrada
conocido al eslabn sealado con el nmero 3, de esta manera los eslabones 2 y 4 se movern
en funcin del movimiento proporcionado por el eslabn 3. Como segundo ejemplo el el clculo
de movilidad de un mecanismo, tenermos al mecanismo de biela manivela de la figura 1-14,
donde contabilizamos 4 elementos o eslabones: la corredera y el pivote como el eslabn fijo, la
manivela 2, la biela de forma triangular 3 y el pistn 4, por lo que n = 4. As mismo, en la figura
se encuentran sealados 3 pares de revoluta en los puntos A, O
2
y B, adems de un par
prismtico sealando la linea de accin del movimiento del pistn (la linea discontnua). El
clculo de la movilidad de este mecanismo quedara de la siguiente manera:
n = 4 (4 eslabones)
j
1
= 4 (3 pares de revoluta de gdl = 1 y 1 par prismtico de gdl = 1)
j
2
= 0 (no hay pares de gdl = 2)
m = 3 (4 1) 2 ( 4 ) 0 = 1
La interpretacin de la movilidad de este mecanismo es muy parecida a la del
mecanismo anterior. Como m > 1, entonces el mecanismo se mueve, por lo que se requerir
solamente mover un solo eslabn para que los restantes se muevan de manera predecible y
consistente. Si tomamos tal mecanismo como parte de un motor de combustin interna,
entonces el eslabn que proporciona el movimiento de entrada es el pistn eslabn 4. Es en este
sitio donde se d la chispa que enciende la mezcla de combustible, por lo que la energa
generada hace desplazar al pistn por la corredera en una carrera de forma alternativa,
cambiando la direccin del movimiento de derecha hacia izquierda para volver su movimiento
Fig. 1-14 Clculo de movilidad de un mecanismo.
Par de revoluta
Par de revoluta
Par de revoluta
Par prismtico
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-12
hacia la derecha (en funcin del esquema de la figura 1-14). Es el pistn, quien por medio del par
de revoluta entre l y la biela triangular (punto B), proporciona un movimiento de impulso a la
biela, quien a su vez hace girar al eslabn 2, que en este caso representa al cigeal dando as
el impulso motriz necesario para hacer girar las ruedas en un automvil. Si este mismo
mecanismo se analiza como parte de un compresor, entonces el eslabn motriz ser el 2. Este
eslabn es hecho girar, usualmente por un motor elctrico, de manera que ahora el motriz le
transmite movimiento y potencia a la biela 3; a su vez, la biela hace desplazarse al pistn 4,
quien es quien comprime el aire bombeado para almacenarlo en un tanque bajo cierta presin,
listo para usarse en cualquier tipo de herramienta neumtica.
El teorema de Grashof (o condicin de Grashof) se utiliza para pronosticar el
comportamiento en el movimiento de los eslabones de los mecanismos de 4 barras slo en base
a sus longitudes. El anlisis parte sabiendo que un mecanismo de 4 barras, como su nombre lo
indica, posee 4 eslabones. Estos se clasifican de acuerdo a su longitud. S se le nombrar a
aqul eslabn que tenga la menor longitud de los cuatro, el ms pequeo en tamao; as mismo
L se le asignar al eslabn cuya longitud sea la mayor. P y Q se le asignarn a los dos
eslabones restantes de forma independiente. Una vez clasificados, se realiza la siguiente
comparacin:
si Q P L S + s + el mecanismo es de Grashof (1.2)
si Q P L S + > + el mecanismo es no Grashof (1.3)
la expresin (1.2) nos dice que si la suma de la longitud del eslabn mas corto S con la longitud
del eslabn mas largo L es menor o igual a la suma de los dos eslabones restantes P y Q,
entonces el mecanismo es Grashof y por lo tanto habr al menos un eslabn que ser capaz de
realizar una revolucin completa. Si por el contrario, la suma de las longitudes de los eslabones
menor y mas largo es mayor que la suma de las longitudes de los eslabones restantes, entonces
el mecanismo es no Grashof y ningn eslabn ser capaz de realizar una vuelta completa. Para
los mecanismos Grashof que cumplen con la ecuacin (1.2), el movimiento de salida va a
depender de la disposicin de los eslabones en cada una de las inversiones. Para ejemplificar,
tomemos el siguiente mecanismo de 4 barras de la figura 1-15 a), donde los eslabones S, L, P y
Q se encuentran ya clasificados. En el inciso a) de la figura 1-15 se muestra la primera inversin
donde el eslabn ms pequeo (S) est conectado con el eslabn tierra, es decir, el eslabn fijo
(L) es adyacente al eslabn ms corto (S), por lo que el eslabn S ser capaz de realizar una
rotacin completa y su eslabn opuesto tiene un movimiento de vaivn. La inversin resultante
se denomina manivela-balancn. En el inciso b) de la misma figura se muestra la segunda
inversin donde el eslabn ms corto (S) est conectado tambin al eslabn tierra. En esta
inversin el eslabn L toma el lugar de eslabn fijo. Por lo tanto, el eslabn S es el que
permanece con la propiedad de ser manivela; esta inversin tambin resulta en manivela-
balancn donde el balancn es el opuesto al eslabn S. La tercera inversin ocurre al fijar y poner
como tierra al eslabn S, por lo que el movimiento resultante ser un doble manivela, donde los
dos eslabones pivoteados son los que realizan la revolucin completa. Vea el inciso c) de la
figura. La cuarta inversin sucede al asignar como fijo al eslabn opuesto al eslabn S (en este
caso el eslabn Q). Se obtendr una inversin doble balancn, donde los dos eslabones oscilan
con respecto a sus centros de giro (pivotes) y slo el eslabn S (que en esta inversin acta
como el eslabn acoplador) realiza la revolucin completa pero no con respecto a los pivotes,
sino respecto a los eslabones con los que se conecta, como se muestra en el inciso d) de la
figura.
Para la expresin (1.3), los mecanismos son no Grashof y todas y cada una de las
inversiones sern doble-balancn, en los cuales ningn eslabn puede girar completamente. Esta
situacin puede observarse en la figura 1-16. Para el caso especfico en que la suma de las
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-13
longitudes de los eslabones S y L sean exactamente igual que la suma de los eslabones P y Q,
aunque el mecanismo sea Grashof, todas las inversiones sern doble-manivela o manivela-
balancn, pero tendrn puntos muertos o de cambio dos veces por cada revolucin de la
manivela de entrada cuando todos los eslabones queden colineales. En estos puntos de cambio,
los eslabones pueden seguir con la direccin de movimiento actual o pueden comenzar el
regreso, retornando por la direccin de donde venan; se dice que el comportamiento de salida
se volver impredecible o indeterminado. A este mecanismo es tambin conocido como
mecanismo de paralelogramo. Vea la figura 1-16 para este caso en particular.
si Q P L S + = + el mecanismo es Grashof (1.4)
Fig. 1-15 Teorema de Grashoff.
a) Primera inversin. b) Segunda inversin.
c) Tercera inversin. d) Cuarta inversin.
S
L
Q
P
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-14
1.3 Repaso de operaciones con nmeros complejos
Los nmeros reales es el conjunto compuesto por los nmeros positivos, negativos y el
cero. Tienen como propiedad ser medidos desde un punto fijo O tomado como referencia sobre
una linea recta. Cada uno de estos nmeros representa una posicin en forma de coordenada
sobre un espacio unidimensional. A esta linea recta, comnmente sobre el eje de las x se le
designa como una coordenada donde el nmero cero 0 denota la referencia; los nmeros
negativos se sitan hacia la izquierda del cero y los nmeros positivos son colocados hacia la
derecha de l. La acepcin del signo negativo en un nmero puede tomarse como el giro de
180 que toma ste para pasar de un lado de la recta hacia el otro. Por ejemplo, un nmero
positivo a (y por ende, situado a la derecha del nmero cero), al multiplicarlo por -1 se convierte
en un nmero a y pasa a colocarse en el lado izquierdo de la recta respecto al cero y
referencia. Ver figura 1-18. Si se tiene la raz cuadrada de un nmero negativo como
2
a ,
Fig. 1-17 Mecanismo de paralelogramo.
Fig. 1-16 Mecanismos no Grashoff.
a) Primera inversin. b) Segunda inversin.
c) Tercera inversin. d) Cuarta inversin.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-15
este puede escribirse como
2
a ) 1 ( lo que equivale a a 1 . Se introduce entonces el
operador 1 el cual es una operacin que se efecta sobre el nmero a. Se utiliza la notacin
i
2
= -1, por lo que se infiere que i= 1 . Resulta que dos operaciones de i es lo mismo que
multiplicar por -1. Se asocia entonces a i
2
con -1, el cual es un operador que implica una rotacin
en sentido contrario a las manecillas del reloj de 180. Esto da lugar a lo siguiente: una sola
indicacin del operador i significa una rotacin de 90 en sentido antihorario. i
2
se convierte en
una rotacin de 180 en el mismo sentido antihorario. i puede interpretarse como un giro de
90 pero ahora en sentido horario.
Otro campo donde se aplica el concepto de los nmero complejos es en el problema de
encontrar las races de los polinomios 0 c b
2
= + + , donde la solucin se encuentra al aplicar la
ecuacin general de la cuadrtica y se obtiene
2
ac 4 b b
2
= . Como se sabe, si el trmino
c 4 b
2
>0, existirn entonces dos races reales. Si c 4 b
2
=0, se obtendr una sola raz. En el
caso de c 4 b
2
<0, se introduce el operador imaginario i= 1 para de esta manera realizar la
siguiente operacin: ( )( ) ( ) i b c 4 1 b c 4 c 4 b
2 2 2
= = y se obtienen las dos races:
i
2
b c 4
2
b
2
1
+ = y i
2
b c 4
2
b
2
1
=
Se define un nmero complejo si es una expresin de la forma | + o = i z donde o y |
son nmeros reales, o es llamada la parte real de z y | es llamada la parte imaginaria de z. Es
tambin conocida como la forma cartesiana del nmero complejo z. Si | = 0, entonces z = o y
es un nmero real. De la misma manera, si o = 0, entonces z = | y es un nmero imaginario. Los
nmeros complejos se pueden sumar, restar y multiplicar utilizando las reglas estndar del
lgebra. El conjugado de un nmero complejo | + o = i z se define como | o = i z y usualmente
se denota como z .
1) Para sumar dos nmeros complejos, se suman de forma independiente la parte real de cada
nmero y, por otra, la parte imaginaria del mismo. Por ejemplo:
(a + ib) + (c + id) = (a + c) + i(b + d)
2) Para restar dos nmeros complejos, se restan de forma independiente la parte real de cada
nmero y, por otra, la parte imaginaria del mismo. Por ejemplo:
(a + ib) - (c + id) = (a - c) + i(b - d)
3) Para multiplicar dos nmeros complejos, se realiza la multiplicacin trmino a trmino de
forma estndar. Donde se requiera, se substituye i
2
por -1. Por ejemplo:
(a + ib) + (c + id) = ac + iad + ibc + i
2
bd = (ac bd) + (ad +bc)
x
-4 -3 -2 -1 0 1 2 3 4
a)
-a -1 0 1 a
x
b)
Fig. 1-18 a) Nmeros reales, b) posicin del nmero a y a.
180
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-16
4) Para dividir dos nmeros complejos, se multiplica el numerador y el denominador por el
conjugado del denominador y donde se requiera, se substituye i
2
por -1. Por ejemplo:
( )
( )
( )
( )
( )
( )
( )
( )
( ) ( )
( )
2 2 2 2 2
2
d c
ad bc i bd ac
d i c
bd i i bc i ad ac
i d c
i d c
i d c
i b a
i d c
i b a
+
+ +
=
+
=
+
+
=
+
+
Los nmeros complejos se grafican sobre un plano cartesiano xy donde la parte real se
representan sobre el eje horizontal (eje de las x) y la parte imaginaria se representan sobre el eje
vertical (eje de las y). Esto d lugar a que cada nmero complejo z es un punto sobre el plano xy
llamado plano complejo. En la figura 1-19 se representan nmeros complejos en los cuatro
cuadrantes.
La magnitud de un nmero complejo | + o = i z , suele representarse como z y se
calcula por la expresin
2 2
z | + o = . El argumento de z (arg z) es definido como el ngulo u
comprendido entre la recta del cero (0) y el punto donde se ubica z medido desde el lado positivo
del eje x. Por convencin se toma que t s < t z arg . En la figura 1-20 se observa lo siguiente:
el nmero complejo | + o = i z se encuentra graficado en un plano xy. Sobre el eje vertical (o eje
imaginario) se ubica | y sobre el eje horizontal (o eje real) se ubica o. Una linea que une al
origen con z tiene por magnitud r y el ngulo comprendido entre el eje real y la lnea Oz es el
ngulo u. De la misma figura se hace evidente que | es la proyeccin de z sobre el eje
imaginario as como o es la proyeccin de z sobre el eje de los nmeros reales. Por lo tanto se
cumplen las siguientes relaciones: u = o cos r y u = | sen r .
Es momento ahora de introducir la denominada identidad de Euler, muy til por sus
caractersticas matemticas, la cual nos dice que u + u =
u
sen i cos e
i
. Al combinar la identidad
de Euler con la definicin del nmero complejo z, tenemos la siguiente equivalencia:
( )
u
= u + u = u + u = | + o =
i
re sen i cos r sen ir cos r i z
z = o + i |
imaginario
real
|
o
0
u
r
Fig. 1-20 Relacin entre o, | y r.
real
imaginario
-a+ ib a+ ib
-a- ib a- ib
Fig. 1-19 Nmeros complejos en el plano xy.
Ing. Jaime Eduardo Trejo Aguirre Cap. 1. Generalidades
Instituto Tecnolgico de Chihuahua 1-17
Esta es la llamada forma polar de un nmero complejo z. La Frmula de De Moivre es una
extensin de la identidad de Euler, la cual se expresa de la siguiente manera:
( ) u + u = u + u n sen i n cos sen i cos
n
Si definimos
1
i
1 1
e r R
u
= como un nmero imaginario cualquiera y a
2
i
2 2
e r R
u
= como un segundo
nmero, las operaciones que pueden realizarse entre ellas son las siguientes:
( ) ( )
( )
( ) ( ) | |
2 1 2 1 2 1
i
2 1
i
2
i
1 2 1
sen i cos r r e r r e r e r R R
2 1 2 1
u + u + u + u = = =
u + u u u
y
( )
( ) ( ) | |
2 1 2 1
2
1 i
2
1
i
2
i
1
2
1
sen i cos
r
r
e
r
r
e r
e r
R
R
2 1
2
1
u u + u u = = =
u u
u
u
Una de las principales y ms importantes razones del uso de la identidad de Euler en el
estudio de la cinemtica de los mecanismos se debe a su propiedad de la derivada. Cuando un
exponencial se deriva, el resultado es la misma funcin, por lo que resulta en una forma muy
compacta a la hora de derivar matemticamente las ecuaciones de posicin para obtener las
ecuaciones de velocidad y las ecuaciones de aceleracin respectivamente. El desarrollo de estas
ecuaciones desde este punto de vista se analizarn con ms detalle en los captulos siguientes
sobre anlisis de posicin, velocidad y aceleracin de los mecanismos planos.
S-ar putea să vă placă și
- Administracion Exitosa de ProyectosDocument40 paginiAdministracion Exitosa de ProyectosOdilon Cruz Gonzalez14% (7)
- Prefijos Del Sistema InternacionalDocument5 paginiPrefijos Del Sistema InternacionalOimignaciodeloyola MarquezÎncă nu există evaluări
- Foro Industria 4.0Document3 paginiForo Industria 4.0Emiro Martinez BegambreÎncă nu există evaluări
- Cotizacion Mantenimiento Preventivo Banco TransformadoresDocument1 paginăCotizacion Mantenimiento Preventivo Banco TransformadoresDanilo100% (1)
- El Estado y El DerechoDocument14 paginiEl Estado y El DerechoHeiBrayan :3Încă nu există evaluări
- Lo Minimo Que Debería Saber Sobre SisDocument18 paginiLo Minimo Que Debería Saber Sobre SisVíctor Daniel Parra MateoÎncă nu există evaluări
- Formato de Entrevista General para Casos de Ninos en PsicologiaDocument16 paginiFormato de Entrevista General para Casos de Ninos en PsicologiaSaul Ortiz UlinÎncă nu există evaluări
- Tesis Doctoral Ciberseguridad en España 2011-15, PropuestaDocument456 paginiTesis Doctoral Ciberseguridad en España 2011-15, PropuestaDCarlos Alberto VGarciaÎncă nu există evaluări
- Electiva Profecional Iii Familia IsoDocument12 paginiElectiva Profecional Iii Familia IsoCesar ValdesÎncă nu există evaluări
- Fuente Dc. Laboratorio CircuitosDocument4 paginiFuente Dc. Laboratorio CircuitosJunior ALdair Andrade SiancasÎncă nu există evaluări
- Unidad 2. Organizacion de La Franquicia PDFDocument64 paginiUnidad 2. Organizacion de La Franquicia PDFclaudiaÎncă nu există evaluări
- Discurso Alumno Egresado Licenciatura Promocion 2008Document1 paginăDiscurso Alumno Egresado Licenciatura Promocion 2008Cyntti A'ngela Serrano LunaÎncă nu există evaluări
- Manual de Usuario Proveedor - GRUPO ROMERODocument17 paginiManual de Usuario Proveedor - GRUPO ROMEROJavier JMÎncă nu există evaluări
- Lista de Precios 2012-1Document58 paginiLista de Precios 2012-1VEMATELÎncă nu există evaluări
- Modelo AidaDocument9 paginiModelo AidaJorge Canales MoralesÎncă nu există evaluări
- Borrador FundamentosDocument17 paginiBorrador FundamentoshzsdfgaÎncă nu există evaluări
- Datos Fiscales Razón Social: AL NATURAL SC NIF: J42570523 Dirección: Calle DIANA 47, DENIADocument2 paginiDatos Fiscales Razón Social: AL NATURAL SC NIF: J42570523 Dirección: Calle DIANA 47, DENIACarlos Guerrero GomezÎncă nu există evaluări
- Sesión Ce, CiDocument11 paginiSesión Ce, CiOscar Mario Lacuta QuispeÎncă nu există evaluări
- PAPER para ChileDocument11 paginiPAPER para ChileMatías FernandezÎncă nu există evaluări
- Los 10 Principios de La EconomíaDocument2 paginiLos 10 Principios de La EconomíaAlexis Racchumí VelásquezÎncă nu există evaluări
- SG01-FR66 Ats Ats EjerosDocument1 paginăSG01-FR66 Ats Ats EjerosMelina CamargoÎncă nu există evaluări
- Capitulo 08 Dosificaciones para Las Mezclas de ConcretoDocument31 paginiCapitulo 08 Dosificaciones para Las Mezclas de ConcretoAngie CaroÎncă nu există evaluări
- 5 DamDocument3 pagini5 DamAnyi SueldoÎncă nu există evaluări
- Proyecto IntegradorDocument7 paginiProyecto IntegradorFernanda CanoÎncă nu există evaluări
- Documento Configurado Con Normas APA Setima Edición - Brayan Collave AyalaDocument5 paginiDocumento Configurado Con Normas APA Setima Edición - Brayan Collave AyalaBrayan Collave AyalaÎncă nu există evaluări
- Mapa ConceptualDocument1 paginăMapa ConceptualJhasminWandurragaÎncă nu există evaluări
- Status Equipos Medicos Por Reparar Alta Tecnología 11-06-20 UtoneDocument1 paginăStatus Equipos Medicos Por Reparar Alta Tecnología 11-06-20 UtonealexanderÎncă nu există evaluări
- Memoria Chanel FinalDocument20 paginiMemoria Chanel Finaledwardandresteoi0% (1)
- Circular 11Document2 paginiCircular 11Andres HuertasÎncă nu există evaluări
- Fisuras GrietasDocument36 paginiFisuras GrietasPiedad FlorezÎncă nu există evaluări