S-ar putea să vă placă și
- Chapter 1 - Finite Elements For 1D Second Order Elliptic EquationDocument153 paginiChapter 1 - Finite Elements For 1D Second Order Elliptic EquationKian ChuanÎncă nu există evaluări
- UMFPACK Quick Start Guide: Timothy A. Davis VERSION 5.7.7, Mar 23, 2018Document19 paginiUMFPACK Quick Start Guide: Timothy A. Davis VERSION 5.7.7, Mar 23, 2018Kian ChuanÎncă nu există evaluări
- Partially Averaged NSDocument9 paginiPartially Averaged NSKian ChuanÎncă nu există evaluări
- Application of Advanced Wall-Functions to Forced and Mixed Convection FlowsDocument32 paginiApplication of Advanced Wall-Functions to Forced and Mixed Convection FlowsKian ChuanÎncă nu există evaluări
- DNS Turbulent Boundary LayerDocument13 paginiDNS Turbulent Boundary LayerKian ChuanÎncă nu există evaluări
- Analysis of A New High Resolution Upwind Compact SchemeDocument19 paginiAnalysis of A New High Resolution Upwind Compact SchemeKian ChuanÎncă nu există evaluări
- Macroscopic Turbulence TheoryDocument21 paginiMacroscopic Turbulence TheoryKian ChuanÎncă nu există evaluări
- Compound Wall Treatment For RANS Computation of Complex Turbulent Flows and Heat TransferDocument26 paginiCompound Wall Treatment For RANS Computation of Complex Turbulent Flows and Heat TransferKian ChuanÎncă nu există evaluări
- A Compact-Difference Scheme For The Navier-Stokes Equations in Vorticity-Velocity FormulationDocument33 paginiA Compact-Difference Scheme For The Navier-Stokes Equations in Vorticity-Velocity FormulationKuldeep BhattacharjeeÎncă nu există evaluări
- Near-Wall Formulation of The Partially Averaged Navier Stokes Turbulence ModelDocument10 paginiNear-Wall Formulation of The Partially Averaged Navier Stokes Turbulence ModelKian ChuanÎncă nu există evaluări
- Numerical RelativisticDocument220 paginiNumerical RelativisticKian Chuan100% (1)
- Application of Advanced Wall-Functions to Forced and Mixed Convection FlowsDocument32 paginiApplication of Advanced Wall-Functions to Forced and Mixed Convection FlowsKian ChuanÎncă nu există evaluări
- Acc ProjDocument36 paginiAcc ProjKian ChuanÎncă nu există evaluări
- NASA/TM-2002-211716 An Introduction To Tensors For Students of Physics and Engineering Joseph C. Kolecki Glenn Research Center, Cleveland, OhioDocument29 paginiNASA/TM-2002-211716 An Introduction To Tensors For Students of Physics and Engineering Joseph C. Kolecki Glenn Research Center, Cleveland, OhiomarkrichardmuradÎncă nu există evaluări
- Jonas Report WFDocument25 paginiJonas Report WFvalarkarthiÎncă nu există evaluări
- Fourth Order Compact Finite Volume Scheme On Nonuniform Grids With Multi-BlockinDocument16 paginiFourth Order Compact Finite Volume Scheme On Nonuniform Grids With Multi-BlockinKian ChuanÎncă nu există evaluări
- Central UpwindDocument21 paginiCentral UpwindKian ChuanÎncă nu există evaluări
- Typeset EquationsDocument41 paginiTypeset EquationsKian ChuanÎncă nu există evaluări
- Basic Tutorials of OpenFOAMDocument13 paginiBasic Tutorials of OpenFOAMKian ChuanÎncă nu există evaluări
- Non-Dimensionalisation of The Navier-Stokes Equations: Michal KoperaDocument45 paginiNon-Dimensionalisation of The Navier-Stokes Equations: Michal KoperaRajeev Raj'sÎncă nu există evaluări
- Mathematical Perspectives On Large Eddy Simulation Models For Turbulent FlowsDocument55 paginiMathematical Perspectives On Large Eddy Simulation Models For Turbulent FlowsKian ChuanÎncă nu există evaluări
- Low-Storage, Explicit Runge-Kutta Schemes For The Compressible Navier-Stokes EquationsDocument43 paginiLow-Storage, Explicit Runge-Kutta Schemes For The Compressible Navier-Stokes EquationsKian ChuanÎncă nu există evaluări
- Large Eddy Simulation of Channel Flow Using Wall FunctionsDocument46 paginiLarge Eddy Simulation of Channel Flow Using Wall FunctionsKian ChuanÎncă nu există evaluări
- Running Tutorials Luc Chin IDocument41 paginiRunning Tutorials Luc Chin IKian ChuanÎncă nu există evaluări
- Numerical Simulation of Three-Dimensional Free Surface Film Flow Over or Around Obstacles On An Inclined PlaneDocument236 paginiNumerical Simulation of Three-Dimensional Free Surface Film Flow Over or Around Obstacles On An Inclined PlaneKian ChuanÎncă nu există evaluări
- A Fourth-Order-Accurate Finite Volume Compact Method For The Incompressible Navier-Stokes SolutionsDocument27 paginiA Fourth-Order-Accurate Finite Volume Compact Method For The Incompressible Navier-Stokes SolutionsKian ChuanÎncă nu există evaluări
- An Immersed Boundary Method With Direct Forcing For The Simulation of Particulate FlowsDocument29 paginiAn Immersed Boundary Method With Direct Forcing For The Simulation of Particulate FlowsKian ChuanÎncă nu există evaluări
- Compact Fourth-Order Finite Volume Method For Numerical Solutions of Navier-Stokes Equations On Staggered GridsDocument26 paginiCompact Fourth-Order Finite Volume Method For Numerical Solutions of Navier-Stokes Equations On Staggered GridsKian ChuanÎncă nu există evaluări
- Finite-Volume Compact Schemes On Staggered GridsDocument42 paginiFinite-Volume Compact Schemes On Staggered GridsKian ChuanÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Protein Structure Prediction Methods (2D and 3DDocument38 paginiProtein Structure Prediction Methods (2D and 3Dth_kiranÎncă nu există evaluări
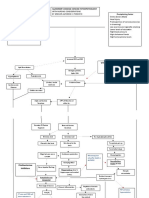
- Pathophysiology of Alzheimer's Disease With Nursing ConsiderationsDocument10 paginiPathophysiology of Alzheimer's Disease With Nursing ConsiderationsTiger Knee100% (1)
- Gujarat State Eligibility Test: Gset SyllabusDocument6 paginiGujarat State Eligibility Test: Gset SyllabussomiyaÎncă nu există evaluări
- Chapter L: Background of The Study As Technology Continues To Develop, Mobile Devices Have BecomeDocument9 paginiChapter L: Background of The Study As Technology Continues To Develop, Mobile Devices Have Becomeferlyn dumapeÎncă nu există evaluări
- Grammar - Unit 6Document3 paginiGrammar - Unit 6Fátima Castellano AlcedoÎncă nu există evaluări
- Application For Enrolment Electoral Roll 20132Document1 paginăApplication For Enrolment Electoral Roll 20132danielÎncă nu există evaluări
- Gravitational Beasts Ambush ProspectorsDocument100 paginiGravitational Beasts Ambush ProspectorsServux WuxÎncă nu există evaluări
- Integra® Licox® PtO2 Monitor User's ManualDocument134 paginiIntegra® Licox® PtO2 Monitor User's ManualSrajner PéterÎncă nu există evaluări
- RIZALDocument36 paginiRIZALRichard GonowonÎncă nu există evaluări
- Happy Birthday Lesson PlanDocument13 paginiHappy Birthday Lesson Planfirststepspoken kidsÎncă nu există evaluări
- Earnings Price Anomaly (Ray Ball, 1992)Document27 paginiEarnings Price Anomaly (Ray Ball, 1992)jeetÎncă nu există evaluări
- Mab, Boy, Son), Used in Patronymics See AlsoDocument46 paginiMab, Boy, Son), Used in Patronymics See AlsoEilise IrelandÎncă nu există evaluări
- Notification of Workplace Violence Form Sarawak General HospitalDocument2 paginiNotification of Workplace Violence Form Sarawak General HospitalRomuald Leo PiongÎncă nu există evaluări
- Grade 4 DLL English 4 q4 Week 7Document3 paginiGrade 4 DLL English 4 q4 Week 7Cristina Singsing100% (1)
- Diss Q1 Week 7-8Document5 paginiDiss Q1 Week 7-8Jocelyn Palicpic BagsicÎncă nu există evaluări
- Test 1 Điền Lỗ - Anh Ngữ Betty - 2Document8 paginiTest 1 Điền Lỗ - Anh Ngữ Betty - 2Nguyễn Trung HiếuÎncă nu există evaluări
- Στιχοι απο εμεναDocument30 paginiΣτιχοι απο εμεναVassos Serghiou SrÎncă nu există evaluări
- Police Planning 2ndDocument8 paginiPolice Planning 2ndLester BalagotÎncă nu există evaluări
- Assignment Histogram and Frequency DistributionDocument6 paginiAssignment Histogram and Frequency DistributionFitria Rakhmawati RakhmawatiÎncă nu există evaluări
- UNIX Concepts: 1. How Are Devices Represented in UNIX?Document15 paginiUNIX Concepts: 1. How Are Devices Represented in UNIX?api-3764166Încă nu există evaluări
- General Session PresentationsDocument2 paginiGeneral Session PresentationsKrishna Kanaiya DasÎncă nu există evaluări
- Static and Dynamic ModelsDocument6 paginiStatic and Dynamic ModelsNadiya Mushtaq100% (1)
- Validation Guide: For Pharmaceutical ExcipientsDocument16 paginiValidation Guide: For Pharmaceutical ExcipientsSanjayaÎncă nu există evaluări
- Parent Training PowerpointDocument15 paginiParent Training PowerpointSamantha WeaverÎncă nu există evaluări
- MedCon Template - Melena+DOC+Septic ConditionDocument26 paginiMedCon Template - Melena+DOC+Septic ConditionPramudia DeniÎncă nu există evaluări
- Beginners Guide To Sketching Chapter 06Document30 paginiBeginners Guide To Sketching Chapter 06renzo alfaroÎncă nu există evaluări
- CGS PPT FinalDocument14 paginiCGS PPT FinalAbc Xyz100% (1)
- Mrs.V.Madhu Latha: Assistant Professor Department of Business Management VR Siddhartha Engineering CollegeDocument14 paginiMrs.V.Madhu Latha: Assistant Professor Department of Business Management VR Siddhartha Engineering CollegesushmaÎncă nu există evaluări
- Language Assistant in ColombiaDocument2 paginiLanguage Assistant in ColombiaAndres CastañedaÎncă nu există evaluări
- The Theory of Karman in The AbhidharmasamuccayaDocument498 paginiThe Theory of Karman in The AbhidharmasamuccayaGuhyaprajñāmitra3100% (5)