S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
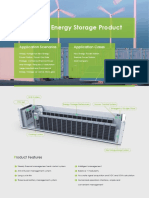
- BESS CONTAINER TYPE【en】Document2 paginiBESS CONTAINER TYPE【en】Arturo Valencia ArteagaÎncă nu există evaluări
- Brochure CalculationsDocument16 paginiBrochure CalculationspepeÎncă nu există evaluări
- Posoco Flexibity in Indian Power System OldDocument10 paginiPosoco Flexibity in Indian Power System Oldtarun41873300Încă nu există evaluări
- ElectricDistributionSystemLosses PDFDocument100 paginiElectricDistributionSystemLosses PDFAlexis AguillonÎncă nu există evaluări
- QIS220Document10 paginiQIS220Ken VikstromÎncă nu există evaluări
- ERCOT Nodal Market Guide v3.0Document42 paginiERCOT Nodal Market Guide v3.0venkateshsss12100% (1)
- (Green Energy and Technology) Jahangir Hossain, Apel Mahmud-Large Scale Renewable Power Generation - Advances in Technologies For Generation, Transmission and Storage-Springer (2014)Document475 pagini(Green Energy and Technology) Jahangir Hossain, Apel Mahmud-Large Scale Renewable Power Generation - Advances in Technologies For Generation, Transmission and Storage-Springer (2014)pouyan100% (1)
- Training - Battery-Based-PV-Systems-with-OutBack-Power PDFDocument97 paginiTraining - Battery-Based-PV-Systems-with-OutBack-Power PDFsudarman007Încă nu există evaluări
- Datasheet S5 GC (100 125) KDocument2 paginiDatasheet S5 GC (100 125) KNorain JanainÎncă nu există evaluări
- UNIT-1 of HVEDocument8 paginiUNIT-1 of HVEAayush Patidar100% (2)
- An Update On The Emerging Energy Technologies Programme: Health and Safety Executive Board HSE/10/41Document12 paginiAn Update On The Emerging Energy Technologies Programme: Health and Safety Executive Board HSE/10/41Rauf Huseynov100% (1)
- AEG Energy Storage AS-BSL1-8000 12000 Installation Instructions ENDocument32 paginiAEG Energy Storage AS-BSL1-8000 12000 Installation Instructions ENSxplanetÎncă nu există evaluări
- China Power System TransformationDocument199 paginiChina Power System Transformationevi wahyuningsihÎncă nu există evaluări
- Development of A Toolbox For Alternative Transient Program Automatic Case Creation and Execution Directly From A Technical DatabaseDocument11 paginiDevelopment of A Toolbox For Alternative Transient Program Automatic Case Creation and Execution Directly From A Technical DatabasedankorankoÎncă nu există evaluări
- OmniflowDocument15 paginiOmniflowFilipe de OliveiraÎncă nu există evaluări
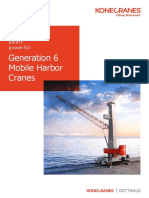
- Generation 6 Mobile Harbor Cranes: Electric Smart PowerfulDocument15 paginiGeneration 6 Mobile Harbor Cranes: Electric Smart PowerfulMSI Presitge YPDO1Încă nu există evaluări
- Brief Review of The State of The Art in International Practice of Energy Audit in Power Distribution SystemDocument2 paginiBrief Review of The State of The Art in International Practice of Energy Audit in Power Distribution Systemjoydeep_d3232Încă nu există evaluări
- MCQ On Smart GridDocument4 paginiMCQ On Smart GridAbhishek Kumar Jha68% (22)
- A Review On Solar Photovoltaics and Roof Top Application of ItDocument5 paginiA Review On Solar Photovoltaics and Roof Top Application of ItraggerloungeÎncă nu există evaluări
- Internship Report: Saqib AliDocument11 paginiInternship Report: Saqib AliSHAH RUKH KHANÎncă nu există evaluări
- Nidec Leroy-Somer D550 DIGITAL AVR DataDocument118 paginiNidec Leroy-Somer D550 DIGITAL AVR DataBasman George100% (1)
- Bitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyDocument5 paginiBitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyRaphael Perci SantiagoÎncă nu există evaluări
- WS Unit 4Document114 paginiWS Unit 4Himanshu RaiÎncă nu există evaluări
- Datasheet Inversor Sun - 3.6-4-5-6k - GDocument1 paginăDatasheet Inversor Sun - 3.6-4-5-6k - GPaulo D'AvilaÎncă nu există evaluări
- Philippine Distribution CodeDocument139 paginiPhilippine Distribution Codepassed outÎncă nu există evaluări
- Design Estmationof Rooftop Grid Tied Solar PVsystemDocument112 paginiDesign Estmationof Rooftop Grid Tied Solar PVsystemMarkicÎncă nu există evaluări
- Influence of Sympathetic Inrush On Voltage DipsDocument12 paginiInfluence of Sympathetic Inrush On Voltage Dipsbedabrat13Încă nu există evaluări
- The Design of A Novel Smart Home Control System Using Smart Grid Based On Edge and Cloud ComputingDocument4 paginiThe Design of A Novel Smart Home Control System Using Smart Grid Based On Edge and Cloud ComputingWawanKharismaÎncă nu există evaluări
- Mapping Demand Response in Europe Today 2015 PDFDocument189 paginiMapping Demand Response in Europe Today 2015 PDFBen TfelaÎncă nu există evaluări