S-ar putea să vă placă și
- Niples o CoplesDocument1 paginăNiples o CoplesBryanyMaria0% (1)
- Tecnicas de Transporte Continuo - Ing. Carlos Enriquez A. (Ed 2013) PDFDocument56 paginiTecnicas de Transporte Continuo - Ing. Carlos Enriquez A. (Ed 2013) PDFBryanyMariaÎncă nu există evaluări
- Niples o CoplesDocument1 paginăNiples o CoplesBryanyMaria0% (1)
- Diferenia Entre Niples y AcoplesDocument1 paginăDiferenia Entre Niples y AcoplesBryanyMariaÎncă nu există evaluări
- Congreso Internacional de Operadores de Cable PDFDocument30 paginiCongreso Internacional de Operadores de Cable PDFBryanyMariaÎncă nu există evaluări
- Diferencias Entre Las Válvulas de Bola y de GloboDocument1 paginăDiferencias Entre Las Válvulas de Bola y de GloboBryanyMariaÎncă nu există evaluări
- Cómo Convertir Dibujos de Visio en Formato de CAD en Visio 2003Document1 paginăCómo Convertir Dibujos de Visio en Formato de CAD en Visio 2003BryanyMariaÎncă nu există evaluări
- Que Es El GNDocument1 paginăQue Es El GNBryanyMariaÎncă nu există evaluări
- Estaciones de CompresiónDocument10 paginiEstaciones de CompresiónBryanyMaria100% (1)
- Cómo Instalar Un Orificio de Restricción de FlujoDocument1 paginăCómo Instalar Un Orificio de Restricción de FlujoBryanyMariaÎncă nu există evaluări
- Diferencia Entre Gas Ideal y RealDocument2 paginiDiferencia Entre Gas Ideal y RealBryanyMaria100% (1)
- Factor de CompresibilidadDocument6 paginiFactor de CompresibilidadBryanyMariaÎncă nu există evaluări
- Norma Aga8 92dcDocument1 paginăNorma Aga8 92dcNilton AlcónÎncă nu există evaluări
- Estaciones de CompresionDocument7 paginiEstaciones de CompresionBryanyMariaÎncă nu există evaluări
- Quema de Gas ResidualDocument4 paginiQuema de Gas ResidualBryanyMariaÎncă nu există evaluări
- BombasDocument11 paginiBombasBryanyMariaÎncă nu există evaluări
- Valculas de Venteo y Estaciones de CompresionDocument7 paginiValculas de Venteo y Estaciones de CompresionBryanyMariaÎncă nu există evaluări
- Válvulas en HysysDocument5 paginiVálvulas en HysysBryanyMariaÎncă nu există evaluări
- Aluminio PFKDocument104 paginiAluminio PFKDarío Muñoz75% (4)
- AcerosDocument9 paginiAcerosBryanyMariaÎncă nu există evaluări
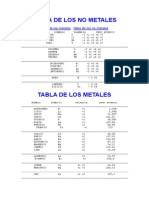
- Tabla de Matales y No MetalesDocument2 paginiTabla de Matales y No MetalesBryanyMaria100% (1)
- Ar AndelaDocument2 paginiAr AndelaBryanyMariaÎncă nu există evaluări
- Perfiles de Aluminio - ALCEMARDocument21 paginiPerfiles de Aluminio - ALCEMARBryanyMariaÎncă nu există evaluări
- SodalDocument63 paginiSodalEduardo Espinoza Valeria100% (1)
- Cap 10, Secc 10.6, Ecuaciones Polares de Las Conicas .Document36 paginiCap 10, Secc 10.6, Ecuaciones Polares de Las Conicas .jose2182100% (1)
- Aptitudinal y Conocimientos UteDocument7 paginiAptitudinal y Conocimientos Uteespartan175328Încă nu există evaluări
- Actividad 10 Tangencias 2Document10 paginiActividad 10 Tangencias 2Sara FunesÎncă nu există evaluări
- Z - Programa-Historia y Filosofía de La MatemáticaDocument4 paginiZ - Programa-Historia y Filosofía de La MatemáticaCarlos HerreraÎncă nu există evaluări
- Indutria El PrinipeDocument10 paginiIndutria El PrinipeHainse100% (1)
- Integracion de Formas Elementales OrdinaDocument3 paginiIntegracion de Formas Elementales OrdinaLuis RamirezÎncă nu există evaluări
- Curvas Planas y en El EspacioDocument9 paginiCurvas Planas y en El EspacioGlory Montoya NavarroÎncă nu există evaluări
- Seccion AureaDocument45 paginiSeccion AureaSergioMoÎncă nu există evaluări
- Contexto Educativo Mexicano Actividad 222 IeuDocument6 paginiContexto Educativo Mexicano Actividad 222 IeuENOC O. CHEVEZÎncă nu există evaluări
- 06 - Integrales Por PartesDocument2 pagini06 - Integrales Por PartesJUAN OSCAR RAMOS ROSASÎncă nu există evaluări
- Dominio de Funcion de Dos VariablesDocument5 paginiDominio de Funcion de Dos VariablesMiguel GarciaÎncă nu există evaluări
- Práctica N°4 - Exposición - VALLE GRANDADocument16 paginiPráctica N°4 - Exposición - VALLE GRANDAJorge Leiva GonzalesÎncă nu există evaluări
- Civil UjapDocument11 paginiCivil UjapJhon GreigÎncă nu există evaluări
- Numeros Complejos - Francisco Javier Reyes Carranza - 1aDocument9 paginiNumeros Complejos - Francisco Javier Reyes Carranza - 1aFRANCISCO JAVIER REYES CARRANZAÎncă nu există evaluări
- Lukasiewicz. Sobre El DeterminismoDocument23 paginiLukasiewicz. Sobre El Determinismoφιλοσοφία100% (3)
- Trabajo de CuerposDocument14 paginiTrabajo de CuerposMarbin Jonathan Rondoy GodosÎncă nu există evaluări
- Viabilidad Del Curriculo (LGO2008)Document17 paginiViabilidad Del Curriculo (LGO2008)Marcela Poblete PérezÎncă nu există evaluări
- P Sem4 Ses1 Coord EsfeDocument16 paginiP Sem4 Ses1 Coord Esfejuan rodolfo soncco apafataÎncă nu există evaluări
- Media Aritmetica PDFDocument10 paginiMedia Aritmetica PDFJhon Fredy Vera VelasquezÎncă nu există evaluări
- Semana 07 para EjerciciosDocument4 paginiSemana 07 para EjerciciosNallely Zevallos VillarÎncă nu există evaluări
- 1.4 Problemas de Aplicación3Document7 pagini1.4 Problemas de Aplicación3chuy juarezÎncă nu există evaluări
- Formulas LogicasDocument3 paginiFormulas LogicasMaximo Manuel SanchezÎncă nu există evaluări
- Taller Variables Aleatorias Discretas Universidad Sergio Arboleda ResueltoDocument8 paginiTaller Variables Aleatorias Discretas Universidad Sergio Arboleda ResueltoJonathan Berrio BeltranÎncă nu există evaluări
- 708 - Tarea3 - Carlos HerreraDocument14 pagini708 - Tarea3 - Carlos HerreraCharly HerreraÎncă nu există evaluări
- Estadisticas Descriptiva.Document43 paginiEstadisticas Descriptiva.Henry LazaroÎncă nu există evaluări
- Calculo de Una Area en TopografiaDocument29 paginiCalculo de Una Area en TopografiaRicardo Pereira Romero0% (2)
- Consolidado EstadisticaDocument55 paginiConsolidado EstadisticaJona TasinchanaÎncă nu există evaluări
- CriptometriaDocument17 paginiCriptometriaNataly LópezÎncă nu există evaluări
- ProbabilidadDocument1 paginăProbabilidadAdriana Villa Uribe50% (4)
- Quiz 4 Estadistica ColomboDocument11 paginiQuiz 4 Estadistica ColomboTATIANA CARDOZOÎncă nu există evaluări