Documente Academic
Documente Profesional
Documente Cultură
Fyp Handgesture Wireless Robot
Încărcat de
kaushiktikuDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Fyp Handgesture Wireless Robot
Încărcat de
kaushiktikuDrepturi de autor:
Formate disponibile
www.final-yearproject.com | www.finalyearthesis.
com
Hand Gesture Based Wireless Controlled Robot
A report submitted In partial fulfillment of the requirements for the degree of
Bachelor Of Technology In Electronics and Communication Engineering
Submitted By Sangam Khare ( 0910331064)
Under the supervision of Ms. Shipra Saini Senior Lecturer
Department of Electronics & Communication Engineering
Shobhit Institute of Engineering & Technology, Saharanpur (U.P.)
Gautam Buddh Technical University, Lucknow
www.final-yearproject.com | www.finalyearthesis.com
UNDERTAKING
We declare that the project work presented in this report entitled Topic, submitted to the department of electronics and communication, Shobhit Institute of Engineering and technology, Saharanpur, for the award of Bachelor of Technology degree in Electronics and Communication Engineering from Gautam Budhh Technical University, Lucknow is our original work. The contents of the report do not form the basis for the award of any other degree to the candidate or to anybody else from this or any other University/Institution. Further we have not plagiarized or submitted the same work for the award of any other degree. In this case undertaking is found incorrect, we accept that our degree may unconditionally be withdrawn. May..., 2013 S.I.E.T.,Gangoh Name of students: Sangam Khare (0910331064)
www.final-yearproject.com | www.finalyearthesis.com
Certificate
Certified that Sangam Khare (0910331064), has carried out the project work presented in this report entitled Hand Gesture Based Wireless Controlled Robot for the award of Bachelor of Technology in Electronic & Communication from Gautam Buddh Technical University, Lucknow under my supervision. The report embodies results of original work, and studies are carried out by the student himself and the contents of the report do not form the basis for the award of any other degree to candidate or to anybody else from this or any other University/Institution.
Supervisor (Ms. Shipra Saini) SeniorLecturer Dept. of Electronics &CommunicationEngineering Shobhit Institute of Engineering & Technology Saharanpur- 247001, Uttar Pradesh, India Date: ..
www.final-yearproject.com | www.finalyearthesis.com
Acknowledgement
We wish to take this opportunity to express my deep sense of gratitude and thanks to our head of department and supervisor. We are thankful; to all faculty member and lab staff member of the department who helped me directly or indirectly in completing the work. Last, but not the least, We are thankful to the management members and director of Shobhit Institute of Engineering and Technology,
Saharanpur (U.P.) who permitted and supported us for completing this project work.
Project associates: Sangam Khare (0910331064)
www.final-yearproject.com | www.finalyearthesis.com
ABSTRACT
The main objective of our project work is to control a robot with gestures of our hand. There are two main components of our system: Arduino microcontroller Accelerometer The accelerometer depends upon the gestures of our hand. Through accelerometer, a passage of data signal is received and it is processed with the help of arduino microcontroller. The microcontroller gives command to the robot to move in the desired direction. The basic working principle for our robot is passage of the data signals of accelerometer readings to the Arduino board fitted on the bot. The program compiled in that arduino runs according to that value, which make the bot function accordingly .While we have used two-axis accelerometer. In which, one axis will control the speed in forward or backward direction and other axis will control the turning mechanism. Accelerometer-based gesture control is studied as a supplementary or an alternative interaction modality. Gesture commands freely trainable by the user can be used for controlling external devices with handheld wireless sensor unit. Two user studies are presented. The first study concerns finding gestures for controlling a design environment (Smart Design Studio), TV, VCR, and lighting. The results indicate that different people usually prefer different gestures for the same task, and hence it should be possible to personalise them. The second user study concerns evaluating the usefulness of the gesture modality compared to other interaction modalities for controlling a design environment. The other modalities were speech, RFID-based physical tangible objects, laser-tracked pen. The results suggest that gestures are a natural modality for certain tasks, and can augment other modalities. Gesture commands were found to be natural, especially for commands with spatial association in design environment control.The project consist of integration of the three technologies as wireless,gesture & embedded.
www.final-yearproject.com | www.finalyearthesis.com
In
robotics technology we design machines to do the specified tasks and in the
advanced version of it robots are designed to be adaptive, that is, respond according to the changing environment and even autonomous, that is, capable to make decisions on their own. While designing a robot the most important thing to be taken in consideration is, obviously, the function to be performed. Robots have basic levels of complexity and each level has its scope for performing the requisite function.The levels of complexity of robots is defined by the members number of actuators and sensors used and for advanced robots the type and number of microprocessors and microcontrollers used. Each increasing component adds to the scope of functionality of a robot. With every joint added, the degrees of freedom in which a robot can work increases and with the quality of the microprocessors and microcontrollers the accuracy and effectiveness with which a robot can work is enhanced.
www.final-yearproject.com | www.finalyearthesis.com
Contents
Chapter-1: Overview of project 1.1 Introduction 1.2 Aim of our project 1.3 Components used in the project Chapter-2: Project Technologies 2.1 Embedded system 2.1.1 Fields of embedded system 2.1.2 Characteristics of embedded system 2.1.3 Applications of embedded system 2.2 Gesture technology 2.2.1 Hand gesture system 2.2.2 Applications of gesture technology 2.3 Wireless technology 2.3.1 Wireless system 2.3.2 Applications of wireless technology Chapter 3-Arduino board with Atmega328 microcontroller 3.1 Introduction 3.2Characteristics of arduino board 3.3 Board description 3.4 Pin configuration of Atmega328 3.5 Pin description 3.6 Block diagram 3.7 Programming environment with Atmega 328 Chapter 4- Accelerometer (MEMs) 4.1 Introduction 4.2 Basic principle 4.3 Structure 4.4 Types of accelerometer 4.5 ADXL335
7
www.final-yearproject.com | www.finalyearthesis.com
4.6 Theory of operation of ADXL335 4.7 Pin configuaration and description 4.8 Applications of accelerometer Chapter 5-RF-module 5.1 Introduction 5.2 RF-Transmitter 5.3 RF-Encoder (HT12E) 5.3.1 Features of HT12E 5.3.2 Pin description 5.3.3 Applications 5.4 RF-Receiver 5.5 RF-Decoder (HT12D) 5.5.1 Pin description 5.5.2 Applications Chapter 6-Mechanical Components 6.1 Motors 6.2 Wheels 6.3 Types of wheels 6.4 Three Wheeled robot 6.5 Chassis Chapter 7-Processing of robot Result Conclusion Future improvements Apendix References
www.final-yearproject.com | www.finalyearthesis.com
List of tables
4.1 Description of ADXL335 5.1 Description of HTI2E 5.2 Description of HT12D
List of figures
1.1 Basic block diagram of project 1.2 Modules of project 2.1 Embedded system fields 2.3 Gesture movement diagram .4 Network connection in wireless system 3.1 Simple arduino board 3.2 Pin diagram of Atmega328 3.3 Block diagram of arduino 4.1 Block diagram of ADXL335 4.2 pin diagram of ADXL335 5.1pin diagram of RF-Encoder 5.2 pin diagram of RF-Decoder 6.1 3wheeled robot
www.final-yearproject.com | www.finalyearthesis.com
Abbreviations
RF-Radio frequency GPS-Global positioning system LAN-Local area network MEMs-Micro electromechanical system PDA-Personal digital assistant HMI-Human machine interface GSM-Global service for mobile CDMA-Code division multiple access GPRS-Global packet radio service QCN-Quick catcher network INS-Inertial navigation system
10
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 01
OVERVIEW OF PROJECT 1.1 INTRODUCTION
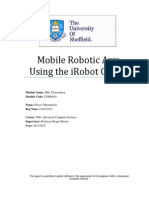
Finalizing the decision of making a gesture controlled robot that will be manoeuvred by a hand gloved mounted with the transmission circuit assembly. The circuit assembly will consist of accelerometer & Arduino board along with an RF transmitter, which together function as a input device to the bot. We decided on this project because we wanted to do a basic application of controlling a vehicle with your hand. The controls of our robot are based on gesture of hand, which becomes simple for any person to handle it. The basic working principle for our robot is passage of the data signals of accelerometer readings to the Arduino board fitted on the bot. The programe compiled in that arduino runs according to that value, which make the bot function accordingly .While we have used two-axis accelerometer. In which, one axis will control the speed in forward or backward direction and other axis will control the turning mechanism.
Fig no-1.1 Basic block diagram of project
11
www.final-yearproject.com | www.finalyearthesis.com
1.2 AIM OF PROJECT
The purpose of our project is to control a toy car using flex sensors attached to a glove. The flex sensors are intended to replace the remote control that is generally used to run the car. Additionally we also created another mode which will allow us to use an accelerometer to control the forward and backward, and left and right movements, while using a flex sensor to control the throttle of the car. We have two gloves with one flex sensor and accelerometer, respectively attached to it. First of all, we do some experiments on accelerometers and flex sensors and try to get the required results (calibration). Then, our next task is to process the sensor data through aurdino and transmit it to bot's aurdino which thereafter, controls the motor driver of the car. For wireless communication between arduino, we think of RF module so that it becomes handy to control the car. Then we do work of the mechanical aspects of the car so that we can easily control through gesture
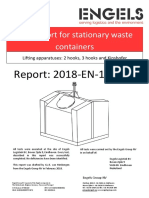
1.3 Components used in the project
There are mainly four components used for processing &performing the action by the robot which are as follows Arduino board with atmega328 microcontroller Micro electro mechanical device (MEMs) named as Accelerometer RF Module Mechanical components
12
www.final-yearproject.com | www.finalyearthesis.com
Fig no:1.2 Modules of project
13
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 02 PROJECT TECHNOLOGIES
2.1 Embedded technology
An embedded system is a computer system designed for specific control functions within a larger system, often with real-time computing constraints. It is embedded as part of a complete device often including hardware and mechanical parts. By contrast, a general-purpose computer, such as a personal computer (PC), is designed to be flexible and to meet a wide range of end-user needs. Embedded systems control many devices in common use today. Embedded systems contain processing cores that are typically either microcontrollers or digital signal processors. The key characteristic, however, is being dedicated to handle a particular task. Since the embedded system is dedicated to specific tasks, design engineers can optimize it to reduce the size and cost of the product and increase the reliability and performance. Some embedded systems are massproduced, benefiting from economies of scale. Physically, embedded systems range from portable devices such as digital watches and MP3 players, to large stationary installations like traffic lights, factory controllers, or the systems controlling nuclear power plants. Complexity varies from low, with a single microcontroller chip, to very high with multiple units, peripherals and networks mounted inside a large chassis or enclosure. Embedded systems span all aspects of modern life and there are many examples of their use. Telecommunications systems employ numerous embedded systems from telephone switches for the network to mobile phones at the end-user. Computer networking uses dedicated routers and network bridges to route data. Consumer electronics include personal digital assistants (PDAs), mp3 players, mobile phones, videogame consoles, digital
cameras, DVD players, GPS receivers, and printers. Many household appliances, such as microwave ovens, washing machines and dishwashers, are including embedded systems to provide flexibility, efficiency and features. Advanced HVAC systems use
networked thermostats to more accurately and efficiently control temperature that can change by time of day and season. Home automation uses wired- and wireless-networking that can be used to control lights, climate, security, audio/visual, surveillance, etc., all of which use embedded devices for sensing and controlling.
14
www.final-yearproject.com | www.finalyearthesis.com
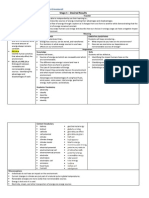
2.1.1 Fields of Embedded System
ASSEMBLY C C++ PLATFORMS :WINDOWS, EMBEDDED LINUX
RESISTOR CAPACITOR DIODE MICROCONTROL LER ,ETC.
COMPUTER SOFTWARE
ELECTRONIC HARDWARE
WITHIN A GIVEN TIME FRAME
FOR A SPECIFIC TASK
[ CAN ALSO BE REAL TIME ]
SOME MECHANICAL PARTS (OPTIONAL)
ACTUATORS :MOTORS, TYRES, ETC. GEARED ASSEMBLIES
Fig no:2.1 Embedded system fields
2.1.2 Characteristics of Embedded technology
15
www.final-yearproject.com | www.finalyearthesis.com
1. Embedded systems are designed to do some specific task, rather than be a general-purpose computer for multiple tasks. Some also have real-time performance constraints that must be met, for reasons such as safety and usability; others may have low or no performance requirements, allowing the system hardware to be simplified to reduce costs. 2. Embedded systems are not always standalone devices. Many embedded systems consist of small, computerized parts within a larger device that serves a more general purpose. For example, the Gibson Robot Guitar features an embedded system for tuning the strings, but the overall purpose of the Robot Guitar is, of course, to play music. Similarly, an embedded system in an automobile provides a specific function as a subsystem of the car itself. 3. The program instructions written for embedded systems are referred to as firmware, and are stored in read-only memory or Flash memory chips. They run with limited computer hardware resources: little memory, small or non-existent keyboard or screen.
2.1.3 Applications of embedded technology
2.2 Gesture
16
www.final-yearproject.com | www.finalyearthesis.com
Technology
Gesture recognition is a topic in computer science and language technology with the goal of interpreting human gestures via mathematical algorithms. Gestures can originate from any bodily motion or state but commonly originate from the face or hand. Current focuses in the field include emotion recognition from the face and hand gesture recognition. Many approaches have been made using cameras and computer vision algorithms to interpret sign language. However, the identification and recognition of posture, gait, proxemics, and human behaviors is also the subject of gesture recognition techniques. Gesture recognition can be seen as a way for computers to begin to understand human body language, this building a richer bridge between machines and humans than primitive text user interfaces or even GUIs (graphical user interfaces), which still limit the majority of input to keyboard and mouse. Gesture recognition enables humans to interface with the machine (HMI) and interact naturally without any mechanical devices. Using the concept of gesture recognition, it is possible to point a finger at the computer screen so that the cursor will move accordingly. This could potentially make conve0ntional input devices such as mouse, keyboards and even touch-screens redundant.
Gesture recognition can be conducted with techniques from computer vision and image processing. The literature includes ongoing work in the computer vision field on capturing gestures or more general human pose and movements by cameras connected to a computer. In computer interfaces, two types of gestures are distinguished: We consider online gestures, which can also be regarded as direct manipulations like scaling and rotating. In contrast, offline gestures are usually processed after the interaction is finished; e. g. a circle is drawn to activate a context menu.Offline gestures: Those gestures that are processed after the user interaction with the object. An example is the gesture to activate a menu.Online gestures: Direct manipulation gestures. They are used to scale or rotate a tangible object.
17
www.final-yearproject.com | www.finalyearthesis.com
2.2.1 Hand Gesture system
Fig no:2.3 Gesture movement diagram
18
www.final-yearproject.com | www.finalyearthesis.com
2.2.2 Applications of Gesture technology
Gesture recognition is useful for processing information from humans which is not conveyed through speech or type. As well, there are various types of gestures which can be identified by computers. Sign language recognition. Just as speech recognition can transcribe speech to text, certain types of gesture recognition software can transcribe the symbols represented through sign language into text. For socially assistive robotics. By using proper sensors (accelerometers and gyros) worn on the body of a patient and by reading the values from those sensors, robots can assist in patient rehabilitation. The best example can be stroke rehabilitation. Directional indication through pointing. Pointing has a very specific purpose in our society, to reference an object or location based on its position relative to ourselves. The use of gesture recognition to determine where a person is pointing is useful for identifying the context of statements or instructions. This application is of particular interest in the field of robotics. Control through facial gestures. Controlling a computer through facial gestures is a useful application of gesture recognition for users who may not physically be able to use a mouse or keyboard. Eye tracking in particular may be of use for controlling cursor motion or focusing on elements of a display. Alternative computer interfaces. Foregoing the traditional keyboard and mouse setup to interact with a computer, strong gesture recognition could allow users to accomplish frequent or common tasks using hand or face gestures to a camera. Immersive game technology. Gestures can be used to control interactions within video games to try and make the game player's experience more interactive or immersive. Virtual controllers. For systems where the act of finding or acquiring a physical controller could require too much time, gestures can be used as an alternative control mechanism. Controlling secondary devices in a car or controlling a television set are examples of such usage.
19
www.final-yearproject.com | www.finalyearthesis.com
Affective computing. In affective computing, gesture recognition is used in the process of identifying emotional expression through computer systems. Remote control. Through the use of gesture recognition, "remote control with the wave of a hand" of various devices is possible. The signal must not only indicate the desired response, but also which device to be controlled.
2.3 Wireless Technology
Wireless telecommunications is the transfer of information between two or more points hat are not physically connected. Distances can be short, such as a few meters for television remote control, or as far as thousands or even millions of kilometers for deep-space radio communications. It encompasses various types of fixed, mobile, and portable two-way radios, cellular telephones, personal digital assistants (PDAs), and wireless networking. Other examples of wireless technology include GPS units, Garage door openers or garage doors, wireless computer mice, keyboards and Headset (audio), headphones, radio receivers, satellite television, broadcast television and cordless telephones. Wireless operations permit services, such as long range communications, that are impossible or impractical to implement with the use of wires. The term is commonly used in the telecommunications industry to refer to telecommunications systems (e.g. radio transmitters and receivers, remote controls, computer networks, network terminals, etc.) which use some form of energy (e.g. radio frequency (RF),acoustic energy, etc.) to transfer information without the use of wires. Information is transferred in this manner over both short and long distances. Wireless networking (i.e. the various types of unlicensed 2.4 GHz WiFi devices) is used to meet many needs. Perhaps the most common use is to connect laptop users who travel from location to location. Another common use is for mobile networks that connect via satellite. A wireless transmission method is a logical choice to network a LAN segment that must frequently change locations The following situations justify the use of wireless technology: To span a distance beyond the capabilities of typical cabling, To provide a backup communications link in case of normal network failure, To link portable or temporary workstations, To overcome situations where normal cabling is difficult or financially impractical, or To remotely connect mobile users or networks.
20
www.final-yearproject.com | www.finalyearthesis.com
2.3.1 Wireless System
Fig no:2.4 Network connection in wireless system
21
www.final-yearproject.com | www.finalyearthesis.com
2.3.2 Applications of wireless technology
Businesses succeed today because they are fast, not vast. Instead of holding large stockpiles of materials and finished goods inventory to meet customer commitments, companies rely on fast information exchange to drive responsive enterprise and supply chain systems that adjust to dynamic production, distribution and service needs.If information is old, it's wrong. And when information is wrong, systems stop, shipments are delayed, and service and productivity suffer. Wireless technology has become essential for getting accurate, real-time information when and where its needed.Now companies are finding new ways to use wireless to create a competitive advantage. Theyre leveraging legacy wireless LANs to provide automated asset tracking and to connect their workforces with wireless voice-over-IP (VoIP). Real-time responsiveness is being extended beyond the four walls with GPS and wide-area voice & data networks for dynamic dispatch and remote access to enterprise information. Before starting a wireless project, make sure your solutions provider is grounded in all the aspects required to make a system successful. Many providers can hang access points and install radio cards, but cant make the connection between wireless technology and business value.
Mobile telephones One of the best-known examples of wireless technology is the mobile phone, also known as a cellular phone, with more than 4.6 billion mobile cellular subscriptions worldwide as of the end of 2010.] These wireless phones use radio waves to enable their users to make phone calls from many locations worldwide. They can be used within range of the mobile telephone site used to house the equipment required to transmit and receive the radio signals from these instruments.
Wireless data communications Wireless data communications are an essential component of mobile computing. The various available technologies differ in local availability, coverage range and performance, and in some circumstances, users must be able to employ multiple connection types and switch between them. To simplify the experience for the user, connection manager software can be used, or a mobile VPN deployed to handle the multiple connections as a secure, single virtual network. Supporting technologies include
22
www.final-yearproject.com | www.finalyearthesis.com
Wi-Fi It is a wireless local area network that enables portable computing devices to connect easily to the Internet. Standardized as IEEE 802.11 a,b,g,n, Wi-Fi approaches speeds of some types of wired Ethernet. Wi-Fi has become the de facto standard for access in private homes, within offices, and at public hotspots. Some businesses charge customers a monthly fee for service, while others have begun offering it for free in an effort to increase the sales of their goods. Cellular data service It offers coverage within a range of 10-15 miles from the nearest cell site. Speeds have increased as technologies have evolved, from earlier technologies such as GSM, CDMA and GPRS, to 3G networks such as W-CDMA, EDGE or CDMA2000. Mobile Satellite
Communications may be used where other wireless connections are
unavailable, such as in
largely rural areas or remote locations. Satellite communications are especially important for transportation, aviation, maritime and military use.
Wireless energy transfer Wireless energy transfer is a process whereby electrical energy is transmitted from a power source to an electrical load that does not have a built-in power source, without the use of interconnecting wires. Computer interface devices Answering the call of customers frustrated with cord clutter, many manufactures of computer peripherals turned to wireless technology to satisfy their consumer base. Originally these units used bulky, highly limited transceivers to mediate between a computer and a keyboard and mouse, however more recent generations have used small, high quality devices, some even incorporating Bluetooth. These systems have become so ubiquitous that some users have begun complaining about a lack of wired peripherals. Wireless devices tend to have a slightly slower response time than their wired counterparts, however the gap is decreasing. Concerns about the security of wireless keyboards arose at the end of 2007, when it was revealed that Microsoft's implementation of encryption in some of its 27 MHz models was highly insecure.
23
www.final-yearproject.com | www.finalyearthesis.com
Wireless Printing
Print barcode labels on demand wherever they are needed. Because wireless printers are independent of cabling and a wired network infrastructure, they can be used virtually anywhere and relocated in minuteswithout incurring additional costs. Wireless printing provides the responsiveness and flexibility that modern manufacturing and supply chain operations demand. These benefits come without performance trade-offs or a premium price. In fact, the total cost of ownership for wireless printing systems can be lower than traditional, wired-network configurations
24
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 03 ARDUINO BOARD WITH ATMEGA 328 MICROCONTROLLER
3.1 Introduction of arduino board
Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers, hobbyists, and anyone interested in creating interactive objects or environments. Arduino can sense the environment by receiving input from a variety of sensors and can affect its surroundings by controlling lights, motors, and other actuators. The microcontroller on the board is programmed using the Arduino programming language (based on Wiring) and the Arduino development environment (based on Processing). Arduino projects can be stand-alone or they can communicate with software running on a computer (e.g. Flash, Processing, and MaxMSP. It is a tool for making computers that can sense and control more of the physical world than your desktop computer. It's an opensource physical computing platform based on a simple microcontroller board, and a development environment for writing software for the board. Arduino can be used to develop interactive objects, taking inputs from a variety of switches or sensors, and controlling a variety of lights, motors, and other physical outputs. Arduino projects can be stand-alone, or they can be communicated with software running on your computer (e.g. Flash, Processing, MaxMSP.) The boards can be assembled by hand or purchased preassembled; the open-source IDE can be downloaded for free. The Arduino programming language is an implementation of Wiring, a similar physical computing platform, which is based on the Processing multimedia programming environment.
3.2
a)
Characteristics of arduino board
Inexpensive Arduino boards are relatively inexpensive compared to other microcontroller platforms. The least expensive version of the Arduino module can be assembled by hand, and even the pre-assembled Arduino modules cost less than $50
b)
Cross-platform The Arduino software runs on Windows, Macintosh OSX, and Linux operating systems. Most microcontroller systems are limited to Windows.
c)
Simple, clear programming environment
25
www.final-yearproject.com | www.finalyearthesis.com
The Arduino programming environment is easy-to-use for beginners, yet flexible enough for advanced users to take advantage of as well. For teachers, it's conveniently based on the Processing programming environment, so students learning to program in that environment will be familiar with the look and feel of Arduino
d)
Open source and extensible software The Arduino software and is published as open source tools, available for extension by experienced programmers. The language can be expanded through C++ libraries, and people wanting to understand the technical details can make the leap from Arduino to the AVR C programming language on which it's based. SImilarly, you can add AVR-C code directly into your Arduino programs if you want to.
e)
Open source and extensible hardware The Arduino is based on Atmel's ATMEGA8 and ATMEGA168microcontrollers. The plans for the modules are published under a Creative Commons license, so experienced circuit designers can make their own version of the module, extending it and improving it.
Fig no:3.1 Simple arduino board 3.3 Board description`
The Arduino Uno is a microcontroller board based on the ATmega328. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz crystal
26
www.final-yearproject.com | www.finalyearthesis.com
oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. "Uno" means one in Italian and is named to mark the upcoming release of Arduino 1.0.
3.4
Pin configuration of ATmega 328
Fig no:3.2 Pin diagram of Atmega328
27
www.final-yearproject.com | www.finalyearthesis.com
3.5 Pin Descriptions VCC GND Digital supply voltage Ground
Port B (PB7) Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port B output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port B pins that are externally pulled low will source current if the pull-up resistors are activated. The Port B pins are tri-stated when a reset condition becomes active, even if the clock is not running. Depending on the clock selection fuse settings, PB7 can be used as output from the inverting Oscillator amplifier. PB6 Depending on the clock selection fuse settings, PB6 can be used as input to the inverting Oscillator amplifier and input to the internal clock operating circuit. Port C (PC5) Port C is a 7-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port C pins that are externally pulled low will source current if the pull-up resistors are activated. The Port C pins are tri-stated when a reset condition becomes active, even if the clock is not running. PC6 PC6 is used as an I/O pin. Note that the electrical characteristics of PC6 differ from those of the other pins of Port C.; PC6 is used as a Reset input. A low level on this pin for longer than the minimum pulse length will generate a Reset, even if the clock is not running. Port D (PD7) Port D is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port D output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port D pins that are externally pulled low will source current if the pull-up resistors are activated. The Port D pins are tri-stated when a reset condition becomes active, even if the clock is not running. AVcc AVCC is the supply voltage pin for the A/D Converter. It should be externally connected to VCC, even if the ADC is not used. If the ADC is used, it should be connected to VCC through
28
www.final-yearproject.com | www.finalyearthesis.com
a low-pass filter. Note that PC6...4 use digital supply voltage. AREF AREF is the analog reference pin for the A/D Converter.
3.6 Block Diagram
Fig no:3.3 block diagram of arduino 3.7 Programming Environment of ATmega 328
Arduino programs can be divided in three main parts: structure, values (variables and constants), and functions 3.7.1 Structure Setup ( ) The setup () function is called when a sketch starts. Use it to initialize variables, pin modes, start using libraries, etc. The setup function will only run once, after each powerup or reset of the Arduino boa
29
www.final-yearproject.com | www.finalyearthesis.com
Loop () After creating a setup () function, which initializes and sets the initial values, the loop() function does precisely what its name suggests, and loops consecutively, allowing your program to change and respond. Use it to actively control the Arduino board.
3.7.2 Constants Constants are predefined variables in the Arduino language. They are used to make the programs easier to read. We classify constants in groups.
High The meaning of high is somewhat different depending on whether a pin is set to an input or output When a pin is configured as an with pinMode, and read with digitalRead, the
microcontroller will report high if a voltage of 3 volts or more is present at the pin. Low The meaning of low also has a different meaning depending on whether a pin is set to input or output. When a pin is configured as an input with pin mode, and read with digital read, the microcontroller will report low if a voltage of 2 volts or less is present at the pin.
3.7.3 Functions Digital I/O There are basically three functions are used in digital i/o. Pin Mode() Configures the specified pin to behave either as an input or an output. Digital Write () Write a high or a low value to a digital pin. If the pin is configured as an iput, writing a high value with digital Write () will enable an internal 20K pull-up resistor. Writing low will disable the pull-up. The pull-up resistor is enough to light an led dimly, so if LEDs appear to work, but very dimly, this is a likely cause. The remedy is to set the pin to an output with the pin Mode () function. Digital Read () Reads the value from a specified digital pin, either high or low. Analog I/O In analog i/o there are also three functions to take input from accelerometer which are
30
www.final-yearproject.com | www.finalyearthesis.com
Analog Reference () Configures the reference voltage used for analog input (i.e. the value used as the top of the input range). The options are: Default The default analog reference of 5 volts (on 5V Arduino boards) or 3.3 volts (on 3.3V Arduino boards) Internal An built-in reference, equal to 1.1 volts on the ATmega168 or ATmega328 and 2.56 volts on theATmega8 (not available on the Arduino Mega) Internal 1V1 A built-in 1.1V reference (Arduino Mega only) Internal 2V56 A built-in 2.56V reference (Arduino Mega only) External The voltage applied to the AREF pin (0 to 5V only) is used as the reference.
31
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 04 ACCELEROMETER (MEMs) 4.1 Introduction
An accelerometer is a device that measures proper acceleration, also called the four-acceleration. For example, an accelerometer on a rocket accelerating through space will measure the rate of change of the velocity of the rocket relative to any inertial frame of reference. However, the proper acceleration measured by an accelerometer is not necessarily the coordinate acceleration (rate of change of velocity). Instead, it is the acceleration associated with the phenomenon of weight experienced by any test mass at rest in the frame of reference of the accelerometer device. For an example where these types of acceleration differ, an accelerometer will measure a value of g in the upward direction when remaining stationary on the ground, because masses on earth have weight m*g. By contrast, an accelerometer in gravitational free fall toward the center of the Earth will measure a value of zero because, even though its speed is increasing, it is at rest in a frame of reference in which objects are weightless.An accelerometer thus measures weight per unit of (test) mass, a quantity of with dimensions of acceleration that is sometimes known as specific force, or g-force (although it is not a force). Another way of stating this is that by measuring weight, an accelerometer measures the acceleration of the free-fall reference frame (inertial reference frame) relative to itself (the accelerometer). This measurable acceleration is not the ordinary acceleration of Newton (in three dimensions), but rather fouracceleration, which is acceleration away from a geodesic path in four-dimensional spacetime.Most accelerometers do not display the value they measure, but supply it to other devices. Real accelerometers also have practical limitations in how quickly they respond to changes in acceleration, and cannot respond to changes above a certain frequency of change.Single- and multi-axis models of accelerometer are available to detect magnitude and direction of the proper acceleration (or g-force), as a vector quantity, and can be used to sense orientation (because direction of weight changes), coordinate acceleration (so long as it produces g-force or a change in g-force), vibration, shock, and falling (a case where the proper acceleration changes, since it tends toward zero). Micromachined accelerometers are increasingly present in portable electronic devices and video game controllers, to detect the position of the device or provide for game input.Pairs of accelerometers extended over a region of space can be used to detect
32
www.final-yearproject.com | www.finalyearthesis.com
differences (gradients) in the proper accelerations offrames of references associated with those points.
4.2 Basic Principle
An accelerometer measures proper acceleration, which is the acceleration it experiences relative to freefall and is the acceleration felt by people and objects. Put another way, at any point in spacetime the equivalence principle guarantees the existence of a local inertial frame, and an accelerometer measures the acceleration relative to that frame. Such accelerations are popularly measured in terms ofg-force. An accelerometer at rest relative to the Earth's surface will indicate approximately 1 g upwards, because any point on the Earth's surface is accelerating upwards relative to the local inertial frame (the frame of a freely falling object near the surface). To obtain the acceleration due to motion with respect to the Earth, this "gravity offset" must be subtracted and corrections for effects caused by the Earth's rotation relative to the inertial frame. The reason for the appearance of a gravitational offset is Einstein's equivalence principle, which states that the effects of gravity on an object are indistinguishable from acceleration. When held fixed in a gravitational field by, for example, applying a ground reaction force or an equivalent upward thrust, the reference frame for an accelerometer (its own casing) accelerates upwards with respect to a free-falling reference frame. The effects of this acceleration are indistinguishable from any other acceleration experienced by the instrument, so that an accelerometer cannot detect the difference between sitting in a rocket on the launch pad, and being in the same rocket in deep space while it uses its engines to accelerate at 1 g. For similar reasons, an accelerometer will read zero during any type of free fall. This includes use in a coasting spaceship in deep space far from any mass, a spaceship orbiting the Earth, an airplane in a parabolic "zero-g" arc, or any free-fall in vacuum. Another example is free-fall at a sufficiently high altitude that atmospheric effects can be neglected. However this does not include a (non-free) fall in which air resistance produces drag forces that reduce the acceleration, until constant terminal velocity is reached. At terminal velocity the accelerometer will indicate 1 g acceleration upwards. For the same reason a sky diver, upon reaching terminal velocity, does not feel as though he or she were in "free-fall", but rather experiences a feeling similar to being supported (at 1 g) on a "bed" of uprushing air. Acceleration is quantified in the SI unit metres per second per second (m/s2), in the cgs unit gal (Gal), or popularly in terms of g-force(g).For the practical purpose of finding the
33
www.final-yearproject.com | www.finalyearthesis.com
acceleration of objects with respect to the Earth, such as for use in an inertial navigation system, a knowledge of local gravity is required. This can be obtained either by calibrating the device at rest, or from a known model of gravity at the approximate current position.
4.3 Structure of Accelerometer
Conceptually, an accelerometer behaves as a damped mass on a spring. When the accelerometer experiences an acceleration, the mass is displaced to the point that the spring is able to accelerate the mass at the same rate as the casing. The displacement is then measured to give the acceleration.In commercial devices, piezoelectric, piezoresistive and capacitive components are commonly used to convert the mechanical motion into an electrical signal. Piezoelectric accelerometers rely on piezoceramics (e.g. lead zirconate titanate) or single crystals (e.g. quartz, tourmaline). They are unmatched in terms of their upper frequency range, low packaged weight and high temperature range. Piezoresistive accelerometers are preferred in high shock applications. Capacitive accelerometers typically use a silicon micro-machined sensing element. Their performance is superior in the low frequency range and they can be operated in servo mode to achieve high stability and linearity. Modern accelerometers are often small micro electromechanical systems (MEMS), and are indeed the simplest MEMS devices possible, consisting of little more than a cantilever beam with a proof mass (also known as seismic mass). Damping results from the residual gas sealed in the device. As long as the Q-factor is not too low, damping does not result in a lower sensitivity. Under the influence of external accelerations the proof mass deflects from its neutral position. This deflection is measured in an analog or digital manner. Most commonly, the capacitance between a set of fixed beams and a set of beams attached to the proof mass is measured. This method is simple, reliable, and inexpensive. Integrating piezoresistors in the springs to detect spring deformation, and thus deflection, is a good alternative, although a few more process steps are needed during the fabrication sequence. For very high sensitivities quantum tunneling is also used; this requires a dedicated process making it very expensive. Optical measurement has been demonstrated on laboratory scale. Another, far less common, type of MEMS-based accelerometer contains a small heater at the bottom of a very small dome, which heats the air inside the dome to cause it to rise. A thermocouple on the dome determines where the heated air reaches the dome and the deflection off the center is a measure of the acceleration applied to the sensor.
34
www.final-yearproject.com | www.finalyearthesis.com
Most micromechanical accelerometers operate in-plane, that is, they are designed to be sensitive only to a direction in the plane of the die. By integrating two devices perpendicularly on a single die a two-axis accelerometer can be made. By adding an additional out-of-plane device three axes can be measured. Such a combination may have much lower misalignment error than three discrete models combined after packaging. Micromechanical accelerometers are available in a wide variety of measuring ranges, reaching up to thousands of g's. The designer must make a compromise between sensitivity and the maximum acceleration that can be measured.
4.4 Types of Accelerometer
Bulk micromachined capacitive Bulk micromachined piezoelectric resistive Capacitive spring mass base DC response Electromechanical servo (Servo Force Balance) High gravity High temperature Laser accelerometer Low frequency Magnetic induction Modally tuned impact hammers Null-balance Optical Pendulous integrating gyroscopic accelerometer Piezoelectric accelerometer Resonance Seat pad accelerometers
0
35
www.final-yearproject.com | www.finalyearthesis.com
4.5 ADXL335 Accelerometer
This is the latest in a long, proven line of analog sensors - the holy grail of accelerometers. The ADXL335 is a triple axis accelerometer with extremely low noise and power consumption - only 320uA! The sensor has a full sensing range of +/-3g.There is no on-board regulation, provided power should be between 1.8 and 3.6VDC. The ADXL335 is a small, thin, low power, complete 3-axis accelerometer with signal conditioned voltage outputs. The product measures acceleration with a minimum full-scale range of 3 g. It can measure the static acceleration of gravity in tiltsensing applications, as well as dynamic acceleration resulting from motion, shock, or vibration. The user selects the bandwidth of the accelerometer using the CX, CY, and CZ capacitors at the XOUT, YOUT, and ZOUT pins. Bandwidths can be selected to suit the application, with a range of 0.5 Hz to 1600 Hz for the X and Y axes, and a range of 0.5 Hz to 550 Hz for the Z axis. The ADXL335 is available in a small, low profile, 4 mm 4 mm 1.45 mm, 16-lead, plastic lead frame chip scale package (LFCSP_LQ).
4.6 Theory of operation of adxl335
The ADXL335 is a complete 3-axis acceleration measurement system. The ADXL335 has a measurement range of 3 g mini-mum. It contains a poly silicon surface-micro machined sensor and signal conditioning circuitry to implement open-loop acceleration measurement architecture. The output signals are analog voltages that are proportional to acceleration. The accelerometer can measure the static acceleration of gravity in tilt-sensing applications as well as dynamic acceleration resulting from motion, shock, or vibration. The sensor is a polysilicon surfacemicromachined structure built on top of a silicon wafer. Polysilicon springs suspend the structure over the surface of the wafer and provide a resistance against acceleration forces. Deflection of the structure is meas-ured using a differential capacitor that consists of independent fixed plates and plates attached to the moving mass. The fixed plates are driven by 180 out-of-phase square waves. Acceleration deflects the moving mass and unbalances the differential capacitor resulting in a sensor output whose amplitude is proportional to acceleration. Phase-sensitive demodulation techniques are then used to determine the magnitude and direction of the acceleration.
36
www.final-yearproject.com | www.finalyearthesis.com
Fig no:4.1 Block diagram of ADXL335 The demodulator output is amplified and brought off-chip through a 32 k resistor. The user then sets the signal bandwidth of the device by adding a capacitor. This filtering improves measurement resolution and helps prevent aliasing.
4.7 Pin Configuration of ADXL335
Fig no:4.2 pin diagram of ADXL335
37
www.final-yearproject.com | www.finalyearthesis.com
Pin description
1 2 3 4 5 6 7 8 9 10 11 12 13 14 NC ST COM NC COM COM COM ZOUT NC YOUT NC XOUT NC VS No Connect.1 Self-Test. Common. No Connect.1 Common. Common. Common. Z Channel Output. No Connect.1 Y Channel Output. No Connect. 1 X Channel Output. No Connect. 1 Supply Voltage (1.8 V to 3.6 V). 15 VS Supply Voltage (1.8 V to 3.6 V). 16 EP NC Exposed Pad No Connect. 1 Not internally connected. Solder for mechanical integrity.
Table no 4.1:Description of ADXL335
38
www.final-yearproject.com | www.finalyearthesis.com
4.8 Applications of Accelerometer Engineering
Accelerometers can be used to measure vehicle acceleration. They allow for performance evaluation of both the engine/drive train and the braking systems.Accelerometers can be used to measure vibration on cars, machines, buildings, process control systems and safety installations. They can also be used to measure seismic activity, inclination, machine vibration, dynamic distance and speed with or without the influence of gravity. Applications for accelerometers that measure gravity, wherein an accelerometer is specifically configured for use ingravimetry, are called gravimeters. Notebook computers equipped with accelerometers can contribute to the Quake-Catcher Network (QCN), a BOINC project aimed at scientific research of earthquakes.
Biology
Accelerometers are also increasingly used in the biological sciences. High frequency recordings of bi-axial or tri-axial acceleration (>10 Hz) allows the discrimination of behavioral patterns while animals are out of sight. Furthermore, recordings of acceleration allow researchers to quantify the rate at which an animal is expending energy in the wild, by either determination of limb-stroke frequency or measures such as overall dynamic body acceleration Such approaches have mostly been adopted by marine scientists due to an inability to study animals in the wild using visual observations, however an increasing number of terrestrial biologists are adopting similar approaches. This device can be connected to an amplifier to amplify the signal.
Industry
Condition monitoring Accelerometers are also used for machinery health monitoring to report the vibration and its changes in time of shafts at the bearings of rotating equipment such as turbines, pumps, fans, rollers, compressors, and cooling towers. Vibration monitoring programs are proven to warn of impending failure, save money, reduce downtime, and improve safety in plants worldwide by detecting conditions such as wear and tear of bearings, shaft misalignment, rotor imbalance, gear failure or bearing
39
www.final-yearproject.com | www.finalyearthesis.com
fault which, if not attended to promptly, can lead to costly repairs. Accelerometer vibration data allows the user to monitor machines and detect these faults before the rotating equipment fails completely. Vibration monitoring programs are utilized in industries such as automotive manufacturing, machine tool applications, pharmaceutical production, power generation and power plants, pulp and paper, sugar mills, food and beverage production, water and wastewater, hydropower, petrochemical and steel manufacturing. Building and structural monitoring Accelerometers are used to measure the motion and vibration of a structure that is exposed to dynamic loads. Measuring and recording how a structure responds to these inputs is critical for assessing the safety and viability of a structure. This type of monitoring is called Dynamic Monitoring. Medical applications Zoll's AED Plus uses CPR-Dpadz which contains an accelerometer to measure the depth of CPR chest compressions. Within the last several years, Nike, Polar and other companies have produced and marketed sports watches for runners that includefootpods, containing accelerometers to help determine the speed and distance for the runner wearing the unit.In Belgium, accelerometer-based step counters are promoted by the government to encourage people to walk a few thousand steps each day.Herman Digital Trainer uses accelerometers to measure strike force in physical training.
Navigation Inertial navigation system
An Inertial Navigation System (INS) is a navigation aid that uses a computer and motion sensors (accelerometers) to continuously calculate via dead reckoning the position, orientation, and velocity (direction and speed of movement) of a moving object without the need for external references. Other terms used to refer to inertial navigation systems or closely related devices include inertial guidance system, inertial reference platform, and many other variations.An accelerometer alone is unsuitable to determine changes in altitude over distances where the vertical decrease of gravity is significant, such as for
40
www.final-yearproject.com | www.finalyearthesis.com
aircraft and rockets. In the presence of a gravitational gradient, the calibration and data reduction process is numerically unstable.
Transport
Accelerometers are also being used in Intelligent Compaction rollers. Accelerometers are used alongside gyroscopes in inertial guidance systems. One of the most common uses for MEMS accelerometers is in airbag deployment systems for modern automobiles. In this case the accelerometers are used to detect the rapid negative acceleration of the vehicle to determine when a collision has occurred and the severity of the collision. Another common automotive use is in electronic stability control systems, which use a lateral accelerometer to measure cornering forces. The widespread use of accelerometers in the automotive industry has pushed their cost downdramatically. Another automotive application is the monitoring of noise, vibration and harshness (NVH), conditions that cause discomfort for drivers and passengers and may also be indicators of mechanical faults.Tilting trains use accelerometers and gyroscopes to calculate the required tilt.
Vulcanology
Modern electronic accelerometers are used in remote sensing devices intended for the monitoring of active volcanos to detect the motion of magma.
Consumers Electronics
Accelerometers are increasingly being incorporated into personal electronic devices. Motion input Some smartphones, digital audio players and personal digital assistants contain accelerometers for user interface control; often the accelerometer is used to presentlandscape or portrait views of the device's screen, based on the way the device is being held. Automatic Collision Notification (ACN) systems also use accelerometers in a system to call for help in event of a vehicle crash. Prominent ACN systems include Onstar AACN
41
www.final-yearproject.com | www.finalyearthesis.com
service,Ford Link's 911 Assist, Toyota's Safety Connect, Lexus Link, or BMW Assist. Many accelerometer-equipped smartphones also have ACN software available for download. ACN systems are activated by detecting crash-strength G-
forces.Nintendo's Wii video game console uses a controller called a Wii Remote that contains a three-axis accelerometer and was designed primarily for motion input. Users also have the option of buying an additional motion-sensitive attachment, the Nun chuk, so that motion input could be recorded from both of the user's hands independently. Is also used on the Nintendo 3DS system.The Sony PlayStation 3 uses the Dual Shock 3 remote which uses a three axis accelerometer that can be used to make steering more realistic in racing games, such as Motorstorm and Burnout Paradise. The Nokia 5500 sport features a 3D accelerometer that can be accessed from software. It is used for step recognition (counting) in a sport application, and for tap gesture recognition in the user interface. Tap gestures can be used for controlling the music player and the sport application, for example to change to next song by tapping through clothing when the device is in a pocket. Other uses for accelerometer in Nokia phones include Pedometer functionality in Nokia Sports Tracker. Some other devices provide the tilt sensing feature with a cheaper component, which is not a true accelerometer. Sleep phase alarm clocks use accelerometric sensors to detect movement of a sleeper, so that it can wake the person when he/she is not in REM phase, therefore awakes more easily. Orientation sensing A number of 21st century devices use accelerometers to align the screen depending on the direction the device is held, for example switching between portrait and landscape modes. Such devices include many tablet PCs and some smartphones and digital cameras. For example, Apple uses an LIS302DL accelerometer in the iPhone, iPod Touch and the 4th and 5th generation iPod Nano allowing the device to know when it is tilted on its side. Third-party developers have expanded its use with fanciful applications such as electronicbobbleheads. The BlackBerry Storm phone was also an early user of this orientation sensing feature. The Nokia N95 and Nokia N82 have accelerometers embedded inside them. It was primarily used as a tilt sensor for tagging the orientation to photos taken with the built-in camera and later became available to other applications
42
www.final-yearproject.com | www.finalyearthesis.com
through a firmware update.As of January 2009, almost all new mobile phones and digital cameras contain at least a tilt sensor and sometimes an accelerometer for the purpose of auto image rotation, motion-sensitive mini-games, and to correct shake when taking photographs.
Image stabilization
Camcorders use accelerometers for image stabilization. Still cameras use accelerometers for anti-blur capturing. The camera holds off snapping the CCD "shutter" when the camera is moving. When the camera is still (if only for a millisecond, as could be the case for vibration), the CCD is "snapped". An example application which has used such technology is the Glogger VS2, a phone application which runs on Symbian OS based phone with accelerometer such as Nokia N96. Some digital cameras, contain accelerometers to determine the orientation of the photo being taken and also for rotating the current picture when viewing.
Device integrity
Many laptops feature an accelerometer which is used to detect drops. If a drop is detected, the heads of the hard disk are parked to avoid data loss and possible head or disk damage by the ensuing shock.
Gravimetry
A gravimeter or gravitometer, is an instrument used in gravimetry for measuring the local gravitational field. A gravimeter is a type of accelerometer, except that accelerometers are susceptible to all vibrations including noise, that cause oscillatory accelerations. This is counteracted in the gravimeter by integral vibration isolation and signal processing. Though the essential principle of design is the same as in accelerometers, gravimeters are typically designed to be much more sensitive than accelerometers in order to measure very tiny changes within the Earth's gravity, of 1 g. In contrast, other accelerometers are often designed to measure 1000 g or more, and many perform multi-axial measurements. The constraints on temporal resolution are usually less for gravimeters, so that resolution can be increased by processing the output with a longer "time constant"
43
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 05 RF-MODULE (RF TRANSMITTER & RECEIVER)
5.1 Introduction An RF Module is a (usually) small electronic circuit used to transmit, receive, or transceive radio waves on one of a number of carrier frequencies. RF Modules are widely used in consumer application such as garage door openers, wireless alarm systems, industrial remote controls, smart sensor applications, and wireless home automation systems. They are often used instead of infrared remote controls as they have the advantage of not requiring line-of-sight operation. Several carrier frequencies are commonly used in commercially-available RF modules, including 433.92MHz, 315MHz, 868MHz and 915MHz. The RF module, as the name suggests, operates at Radio Frequency. The corresponding frequency range varies between 30 kHz & 300 GHz. In this RF system, the digital data is represented as variations in the amplitude of carrier wave. This kind of modulation is known as Amplitude Shift Keying (ASK).Transmission through RF is better than IR (infrared) because of many reasons. Firstly, signals through RF can travel through larger distances making it suitable for long range applications. Also, while IR mostly operates in line-of-sight mode, RF signals can travel even when there is an obstruction between transmitter & receiver. Next, RF transmission is more strong and reliable than IR transmission. RF communication uses a specific frequency unlike IR signals which are affected by other IR emitting sources. This RF module comprises of an RF Transmitter and an RF Receiver. The transmitter/receiver (Tx/Rx) pair operates at a frequency of 434 MHz. An RF transmitter receives serial data and transmits it wirelessly through RF through its antenna connected at pin4. The transmission occurs at the rate of 1Kbps - 10Kbps.The transmitted data is received by an RF receiver operating at the same frequency as that of the transmitter. The RF module is often used along with a pair of encoder/decoder. The encoder is used for encoding parallel data for transmission feed while reception is decoded by a decoder. HT12E-HT12D, HT640-HT648, etc. are some commonly used encoder/decoder pair ICs. 5.2 RF-Transmitter Radio transmitter design is a complex topic which can be broken down into a series of smaller topics. A radio communication all four system requires tuned to
44
two tuned
circuits each
at
the is
transmitter and receiver,
the
same frequency. The
transmitter
www.final-yearproject.com | www.finalyearthesis.com
anelectronic device which,
usually
with
the
aid
of
an antenna,
propagates
an
electromagnetic signal such as radio, television, or other telecommunications. Arrangement of RF-Transmitter The transmitting system consists of two tuned circuits such that the one containing the spark-gap is a persistent oscillator; the other, containing the aerial structure, is a free radiator maintained in oscillation by being coupled to the first (Nikola
Tesla and Guglielmo Marconi). The oscillating system, including the aerial structure with its associated inductance-coils and condensers, is designed to be both a sufficiently persistent oscillator and a sufficiently active radiator (Oliver Lodge). The transmitting system consists of two electrically coupled circuits, one of which, containing the air-gap, is a powerful but not persistent oscillator, being provided with a device for quenching the spark so soon as it has imparted sufficient energy to the other circuit containing the aerial structure, this second circuit then independently radiating the train of slightly damped waves at its own period (Oliver Joseph Lodge and Wilhelm Wien). 5.3 RF-Encoder (HT12E) The HT12E encoder is designed for remote control system applications. It will interface to RF transmitter modules to create a secure single or multiple channel RF remote control transmitter. The oscillator is configured simply with the addition of a resistor. It is capable of encoding information which consists of N address bits and 12-N data bits. Each address/data input can be set to one of the two logic states. The programmed addresses/data are transmitted together with the header bits via an RF transmission medium upon receipt of a trigger signal. HT12E is an encoder integrated circuit of 212 series of encoders. They are paired with 212 series of decoders for use in remote control system applications. It is mainly used in interfacing RF and infrared circuits. The chosen pair of encoder/decoder should have same number of addresses and data format. Simply put, HT12E converts the parallel inputs into serial output. It encodes the 12 bit parallel data into serial for transmission through an RF transmitter. These 12 bits are divided into 8 address bits and 4 data bits. HT12E has a transmission enable pin which is active low. When a trigger signal is received on TE pin, the programmed addresses/data are transmitted
45
www.final-yearproject.com | www.finalyearthesis.com
together with the header bits via an RF or an infrared transmission medium. HT12E begins a 4word transmission cycle upon receipt of a transmission enable. This cycle is repeated as long as TE is kept low. As soon as TE returns to high, the encoder output completes its final cycle and then stops. 5.3.1 Features of HT12E
Operating voltage: 2.4V~12V Low power and high noise immunity CMOS technology Low standby current: 0.1uA (typ.) at VDD=5V Built-in oscillator, needs only 5% resistor Compatible with the HT12D decoder IC 18-pin DIP
Fig no:5.1 pin diagram of RF-Encoder
46
www.final-yearproject.com | www.finalyearthesis.com
5.3.2 Pin Description Pin No 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Function Name A0 A1 A2 A3 A4 A5 A6 A7 Ground AD0 AD1 AD2 AD3 TE Osc2 Osc1 Output Vcc
8 bit Address pins for input
Ground (0V) 4 bit Data/Address pins for input Transmission enable; active low Oscillator input Oscillator output Serial data output Supply voltage; 5V (2.4V-12V)
Table 5.1 Description of HTI2E 5.3.3 Application of HT12E
Burglar alarm system Smoke and fire alarm system Garage door controllers Car door controllers Car alarm system Security system Cordless telephones
47
www.final-yearproject.com | www.finalyearthesis.com
5.4 RF-Receiver
The RF receiver is specially degined to receive the signal from the rf transmitter to demodulate or decode the original signal.for receiving we use receiver and for decoding we use the IC HT12D.The description of HT12D are as under as follows-
5.5 RF-Decoder (HT12D)
HT12D is a decoder integrated circuit that belongs to 212 series of decoders. This series of decoders are mainly used for remote control system applications, like burglar alarm, car door controller, security system etc. It is mainly provided to interface RF and infrared circuits. They are paired with 212 series of encoders. The chosen pair of encoder/decoder should have same number of addresses and data format. In simple terms, HT12D converts the serial input into parallel outputs. It decodes the serial addresses and data received by, say, an RF receiver, into parallel data and sends them to output data pins. The serial input data is compared with the local addresses three times continuously. The input data code is decoded when no error or unmatched codes are found. A valid transmission in indicated by a high signal at VT pin.HT12D is capable of decoding 12 bits, of which 8 are address bits and 4 are data bits. The data on 4 bit latch type output pins remain unchanged until new is received. The decoders receive serial addresses and data from a programmed 212 series of encoders that are transmitted by a carrier using an RF or an IR transmission medium. They compare the serial input data three times continuously with their local addresses. If no error or unmatched codes are found, the input data codes are decoded and then transferred to the output pins. The VT pin also goes high to indicate a valid transmission. The 212 series of decoders are capable of decoding informations that consist of N bits of address and 12-N bits of data. Of this series, the HT12D is arranged to provide 8 address bits and 4 data bits, and HT12F is used to decode 12 bits of address information.
48
www.final-yearproject.com | www.finalyearthesis.com
Pin Configuration
Fig no:5.2 pin diagram of RF-Decoder
49
www.final-yearproject.com | www.finalyearthesis.com
5.5.1 Pin Description
Pin No 1 2 3 4 5 6 7 8 9 10 11 4 bit Data/Address pins for output 12 13 14 15 16 17 18 Serial data input Oscillator output Oscillator input Valid transmission; active high Supply voltage; 5V (2.4V-12V) D2 D3 Input Osc2 Osc1 VT Vcc Ground (0V) 8 bit Address pins for input A0 A1 A2 A3 A4 A5 A6 A7 Ground D0 D1 Function Name
Table 5.2 description of HT12D
50
www.final-yearproject.com | www.finalyearthesis.com
5.5.2 Application
RF Modules are used in applications where size, price and power consumption coupled with long range are important parameters. RF Module integration with MCU, memory and ADC, will fit almost all applications.
Industrial Automation
In Industrial automation there is an ever-increasing need to monitor and analyse the status or wear and tear of machines and sensors. Using the low power wireless connectivity of the RF Module is a low high reliability method of getting access to this data.
Remote Meter Reading
With the extremely high integration of the RF Module, its high output power and sensitivity can be used to make a single chip long range solutions for remote meter reading.
Security
Frequency hopping and short time on air increases security in applications using the RF module. In Remote Keyless Entry systems the low voltage operation, internal voltage regulator and low current operation of the RF Module increases the battery life time.
51
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER 06 MECHANICAL COMPONENTS
6.1 Introduction When I first started building my first robot, someone much more experienced than me once said paraphrased, "if you build a mechanically crappy robot with expert programming and control, you will only get a crappy robot; build a mechanically professional robot with crappy programming and control, you will still get a well built robot." Its very good advice which I still use today.Planning. Would you say someone who plans his future will have a better future? YES! I cannot emphasize any more for you to design your robot out on paper (or computer) first. This means plan out everything, such as what material to build your robot out of<, where to put every screw, how you will attach your sensors - EVERYTHING. You will save money and time, and will have a better constructed robot too. To do this, you should draw all your parts out to dimension, mark your holes, and understand how all your parts connect.There are mainly three mechanical components are used in the project which are as
6.2 Motors
There are several different types of motors. Each motor type has several advantages as well as disadvantages depending on a particular robots design. In our project we use the D.C motors which are very easy to use, but like most other motors their usefulness for robotics is very dependent on the gearing available. DC-motors are made much more effective if they have an efficient gear ratio for a particular task. If your priority is to have a fast spinning motor and torque is of little concern a low gearing or even no gearing may be what you need; however, most motors used in robots need torque over top speed so a motor with a high gear ratio could be more useful. The control of a DC motor can be split into two parts: speed and direction.
6.3 Wheels
Wheeled robots are robots that navigate around the ground using motorized wheels to propel themselves. This design is simpler than using treads or legs and by using wheels they are easier
52
www.final-yearproject.com | www.finalyearthesis.com
to design, build, and program for movement in flat, not-so-rugged terrain. They are also better controlled than other types of robots. Disadvantages of wheeled robots are that they cannot navigate well over obstacles, such as rocky terrain, sharp declines, or areas with low friction. Wheeled robots are most popular among the consumer market, their differential steering provides low cost and simplicity. Robots can have any number of wheels, but three wheels are sufficient for static and dynamic balance. Additional wheels can add to balance; however, additional mechanisms will be required to keep all the wheels in the ground, when the terrain is not flat. When buying (or making) your wheels you want to put your motor into consideration. For a start, there is torque and velocity. Large diameter wheels give your robot low torque but high velocity. So if you already have a very strong motor, then you can use wheels with larger diameters. Servo's already have good torque, so you should use larger diameter wheels. But if your motor is weak (such as if it does not have any gearing), you want to use a much smaller diameter wheel. This will make your robot slower, but at least it has enough torque to go up a hill! Another dumb mistake someone can make is buying a wheel that has a diameter close to or less than the motor diameter. For example, if you have a 1" diameter motor, and a 1.5" diameter wheel, you have a .25" ground clearance ( (1.5"-1")/2=.25" ). How high is the tallest object you want to go over? 6.4 Types of wheels 2 wheeled robot 3 wheeled robot 4 wheeled rbot 5 or more wheeled robot
NOTE-In our project we use 3 wheeled robots.
3-Wheeled robot
3-wheeled robots may be of two types: differentially steered (2 powered wheels with an additional free rotating wheel to keep the body in balance) or 2 wheels powered by a single source and a powered steering for the third wheel. In the case of differentially steered wheels, the robot direction may be changed by varying the relative rate of rotation of the two separately driven wheels. If both the wheels are driven in the same direction and speed, the robot will go
53
www.final-yearproject.com | www.finalyearthesis.com
straight. Otherwise, depending on the speed of rotation and its direction, the center of rotation may fall anywhere in the line joining the two wheels.
Fig no:6.1 3wheeled robot The center of gravity in this type of robot has to lay inside the triangle formed by the wheels. If too heavy of a mass is mounted to the side of the free rotating wheel, the robot will tip over. 6.5 Chassis A chassis consists of an internal framework that supports a man-made object. It is analogous to an animal's skeleton. An example of a chassis is the under part of a motor vehicle, consisting of the frame (on which the body is mounted) with the wheels and machinery. we use the chassis to maintain the bot of robot which is made of the aluminum sheet and the rf receiver is mounted on it to receive the signal.
54
www.final-yearproject.com | www.finalyearthesis.com
CHAPTER-07 PROCESSING OF ROBOT Calibaration of sensor
The accelerometer has been calibrated to get it maximum and minimum value.this depends upon the external environmental conditions.this also gives the closure sensitivity.The process can be understood by the help of flow chart.
55
www.final-yearproject.com | www.finalyearthesis.com
Transmission of data
The input is given by the accelerometer that has been analog in the nature.its has been digitally coded by the input A/D converter.the A/D converter is in built in the arduino board that is of 8 bit and output goes to the digital pins of the arduino board
56
www.final-yearproject.com | www.finalyearthesis.com
Receiving the data
The receiving data on the digital pins is sent to the L293D.According to the output the motors it will run in forward,backward,left and right.so the output depends upon the directly to the accelerometer input that can be used for the robot controlling and accelerometrer input depends upon the movement of the gestures.
57
www.final-yearproject.com | www.finalyearthesis.com
Circuit diagram Accelerometer circuit diagram
Connectiobn diagram
58
www.final-yearproject.com | www.finalyearthesis.com
Result
The bot uses differential turning mechanism, which helps the bot precise to turn. The bot uses rotational axes to accelerate or to de-accelerate. Its entire motion is controlled by arduino which extracts readings from accelerometer (ADXL335) and transmits calculated data via arduino board and processed with RF module which in turn consists of similar mechanism. The bot works properly because of its low weight, and preciseness with help of the mechanix kit.
Actual v/s Theoretical
Theoretically we wanted precision in the angle mapping versus bot speed, failing to which, we developed the alternative of angle ranges versus bot speed. Similar mechanism is followed in bot banking where logistic data is feed to the receiving bot and the bank angle is calculated accordingly. Logistical problem is faced when decoding ASCII value, which is primarily transmitted via Xbee. To overcome the above we modulated the primary data source and changed it to a range of values that are eventually understood by the receiver and gradually interpreted. One other major overcome that the all the set up are affected by the environmental conditions. so there is no significant accuracy. so the calibration is necessary at every measurement.its also result that a small application of accelerometer.
59
www.final-yearproject.com | www.finalyearthesis.com
Conclusion
This project taught us Arduinos coding which we can use in the further future as the Arduino is useful in various instruments and also very important electronics equipment as well as about the basics of arduino. We learnt about the transmission of the signals through RF module and also the use of accelerometer. The project also cultivated dedication, team work and the division of labour amongst us made this project to succeed. We had a great pleasure working on this project and working as a team.this project also provide the basic introductional review of accelerometer.
Future Improvements
Currently we are working on improving serial communication between the Arduions. We are planing to install a LCD panel on the gloves so that when the glove module run on the battery, then we can see the reading of the accelerometer (real time) and it is helpful in debugging operation.
We are also working on improvising our GUI in the processing applet so that we have duplex communication management between devices. We are also install a joystick shield.
60
www.final-yearproject.com | www.finalyearthesis.com
APENDIX
Input Declaration
const int sensorPiny = A0; const int sensorPinx = A1; const int motor1 = 2; const int motor2 = 4; const int motor3 = 8; const int motor4 = 12; /*const int ledPin1 = 3; const int ledPin2 = 11;*/
int sensorValuey = 0; int sensorValuex = 0; int yAxis = 0; int xAxis = 0;
Output Declaration
void setup() { pinMode(motor1, OUTPUT); pinMode(motor2, OUTPUT); pinMode(motor3, OUTPUT); pinMode(motor4, OUTPUT); pinMode(13, OUTPUT); digitalWrite(13, HIGH); while (millis() < 5000) { } digitalWrite(13, LOW); }
61
www.final-yearproject.com | www.finalyearthesis.com
Calibration of sensor
void loop() { sensorValuey = analogRead(sensorPiny); sensorValuex = analogRead(sensorPinx); if (sensorValuey < 310) { // yAxis = (370-sensorValuey); digitalWrite(motor1, LOW); digitalWrite(motor2, HIGH); digitalWrite(motor3, LOW); digitalWrite(motor4, HIGH); /* analogWrite(ledPin1, yAxis*1.77); digitalWrite(ledPin2, LOW);*/ } if (sensorValuey > 360) { // yAxis = (sensorValuey-418); digitalWrite(motor1, HIGH); digitalWrite(motor2, LOW); digitalWrite(motor3, HIGH); digitalWrite(motor4, LOW); /* analogWrite(ledPin2, yAxis*1.77); digitalWrite(ledPin1, LOW);*/ } if (sensorValuex < 310) { // xAxis = (330-sensorValuex); digitalWrite(motor1, HIGH); digitalWrite(motor2, LOW); digitalWrite(motor3, HIGH);
62
www.final-yearproject.com | www.finalyearthesis.com
digitalWrite(motor4, HIGH); /* analogWrite(ledPin1, xAxis*1.75); digitalWrite(ledPin2, LOW);*/ } if (sensorValuex > 360) { // xAxis = (sensorValuex-373); digitalWrite(motor1, HIGH); digitalWrite(motor2, HIGH); digitalWrite(motor3, HIGH); digitalWrite(motor4, LOW); /* analogWrite(ledPin2, xAxis*1.75); digitalWrite(ledPin1, LOW);*/ }
63
www.final-yearproject.com | www.finalyearthesis.com
References
1. ^ Michael Barr. "Embedded Systems Glossary". Neutrino Technical Library. Retrieved 2007-0421. 2. ^ Heath, Steve (2003). Embedded systems design. EDN series for design engineers (2 ed.). Newnes. p. 2. ISBN 978-0-7506-5546-0. "An embedded system is a microprocessor based system that is built to control a function or a range of functions." 3. ^ Michael Barr; Anthony J. Massa (2006). "Introduction". Programming embedded systems: with C and GNU development tools. O'Reilly. pp. 12. ISBN 978-0-596-00983-0. 4. ^ Giovino, Bill. "Micro controller.com - Embedded Systems supersite". 5. ^ Embedded.com - Under the Hood: Robot Guitar embeds autotuning By David Carey, TechOnline EE Times (04/22/08, 11:10:00 AM EDT)Embedded Systems Design Embedded.com 6. ^ Matthias Rehm, Nikolaus Bee, Elisabeth Andr, Wave Like an Egyptian - Accelerometer Based Gesture Recognition for Culture Specific Interactions, British Computer Society, 2007 7. ^ Pavlovic, V., Sharma, R. & Huang, T. (1997), "Visual interpretation of hand gestures for human-computer interaction: A review", IEEE Trans. Pattern Analysis and Machine Intelligence., July, 1997. Vol. 19(7), pp. 677 -695. 8. ^ R. Cipolla and A. Pentland, Computer Vision for Human-Machine Interaction, Cambridge University Press, 1998, ISBN 978-0-521-62253-0 9. ^ Ying Wu and Thomas S. Huang, "Vision-Based Gesture Recognition: A Review", In: GestureBased Communication in Human-Computer Interaction, Volume 1739 of Springer Lecture Notes in Computer Science, pages 103-115, 1999, ISBN 978-3-540-66935-7,doi:10.1007/3-540-466169 10. ^ Alejandro Jaimesa and Nicu Sebe, Multimodal humancomputer interaction: A survey, Computer Vision and Image Understanding Volume 108, Issues 1-2, OctoberNovember 2007, Pages 116-134 Special Issue on Vision for Human-Computer
Interaction,doi:10.1016/j.cviu.2006.10.019 11. ^ "ATIS Telecom Glossary 2007". atis.org. Retrieved 2008-03-16.
64
www.final-yearproject.com | www.finalyearthesis.com
12. ^ Tsai, Allen. "AT&T Releases Navigator GPS Service with Speech Recognition". Telecom Industry News. Retrieved 2 April 2008. 13. ^ a b Story, Alfred Thomas (1904). A story of wireless telegraphy. New York, D. Appleton and Co.. 14. ^ a b "Heinrich Rudolf Hertz". chem.ch.huji.ac.il. Retrieved 2008-03-16. 15. ^ J.C. Bose, Collected Physical Papers. New York, N.Y.: Longmans, Green and Co., 1927
65
S-ar putea să vă placă și
- Fyp - Handgesture-Wireless RobotDocument69 paginiFyp - Handgesture-Wireless RobotVasile VarzariÎncă nu există evaluări
- Minor Project ReportDocument28 paginiMinor Project Reportanshuman KashyapÎncă nu există evaluări
- Obstacle Avoiding RobotDocument24 paginiObstacle Avoiding Robotmkafle101Încă nu există evaluări
- Hand Gesture Controlled Robot.Document70 paginiHand Gesture Controlled Robot.Aditya SharmaÎncă nu există evaluări
- Pragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveDe la EverandPragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveÎncă nu există evaluări
- Wirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojDocument4 paginiWirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojNaga Raju GÎncă nu există evaluări
- Line Following Robot ResearchDocument4 paginiLine Following Robot ResearchtherealslimÎncă nu există evaluări
- Gps Final Year ProjectDocument52 paginiGps Final Year ProjectPramod Niraula100% (1)
- Mohammed 2013Document17 paginiMohammed 2013FiandjafarÎncă nu există evaluări
- Multipurpose Robotic ArmDocument7 paginiMultipurpose Robotic ArmIJRASETPublicationsÎncă nu există evaluări
- Android GameDocument27 paginiAndroid GameAnuj TripathiÎncă nu există evaluări
- SRS Praveen JoseDocument12 paginiSRS Praveen JosePraveen JoseÎncă nu există evaluări
- Gourav Final Report Addhar 123Document14 paginiGourav Final Report Addhar 123Divyansh MathurÎncă nu există evaluări
- Design and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionDocument8 paginiDesign and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionAli Najim Al-AskariÎncă nu există evaluări
- Hand Gestureand Voice Controlled Smart VehicleDocument5 paginiHand Gestureand Voice Controlled Smart VehicleSAHITHLAL HOWDEKARÎncă nu există evaluări
- Project File SrsDocument38 paginiProject File SrsYash KumarÎncă nu există evaluări
- Line FollowerDocument47 paginiLine Followeryogi6804Încă nu există evaluări
- COPPELIASIMDocument7 paginiCOPPELIASIMRooban SÎncă nu există evaluări
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 paginiXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYÎncă nu există evaluări
- Comparison of Formation Algorithms Implemented On Multi-Agent Mobile RobotsDocument3 paginiComparison of Formation Algorithms Implemented On Multi-Agent Mobile RobotsNuwan IndikaÎncă nu există evaluări
- Floor Cleaning Robot ReportDocument40 paginiFloor Cleaning Robot ReportAnkita PradhanÎncă nu există evaluări
- FTheodoulou DissertationcDocument61 paginiFTheodoulou DissertationcAmino fileÎncă nu există evaluări
- Design, Analysis and Manufacturing of Four Degree of Freedom Wireless (Wi-Fi) Controlled Robotic ARMDocument12 paginiDesign, Analysis and Manufacturing of Four Degree of Freedom Wireless (Wi-Fi) Controlled Robotic ARMMasood Akhtar VaheedÎncă nu există evaluări
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument41 paginiWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraÎncă nu există evaluări
- Abhishak PR Sem 6Document13 paginiAbhishak PR Sem 6Iron man SafariÎncă nu există evaluări
- 7th Sense Multipurpose RobotDocument50 pagini7th Sense Multipurpose Robotashok3manjuÎncă nu există evaluări
- Smit PR Sem 6Document13 paginiSmit PR Sem 6Iron man SafariÎncă nu există evaluări
- Ijreiss 3094 97729Document13 paginiIjreiss 3094 97729ZEUS GAMINGÎncă nu există evaluări
- Pick and Place Robot Report New Edited2Document19 paginiPick and Place Robot Report New Edited2Kshitij BandarÎncă nu există evaluări
- Arduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringDocument8 paginiArduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringAbhishekÎncă nu există evaluări
- Robot Control ThesisDocument5 paginiRobot Control Thesisafloaaffbkmmbx100% (1)
- Gesture Controlled Car Via Image Processing: Embedded System Design & ApplicationDocument16 paginiGesture Controlled Car Via Image Processing: Embedded System Design & ApplicationSaRosh RaeesÎncă nu există evaluări
- Eee ProjectDocument14 paginiEee ProjectShahriar BoniÎncă nu există evaluări
- Gesture Controlled Car Via Image Processing: Embedded System Design & ApplicationDocument16 paginiGesture Controlled Car Via Image Processing: Embedded System Design & ApplicationSaRosh RaeesÎncă nu există evaluări
- Report CssDocument16 paginiReport CssPranav ShirsatÎncă nu există evaluări
- IJRA TemplateDocument9 paginiIJRA TemplateLuis VelascoÎncă nu există evaluări
- Designand Developmentofa Robotic ArmDocument5 paginiDesignand Developmentofa Robotic Arm1DS20EE410 KalingÎncă nu există evaluări
- AMP Microprojet Final 22Document19 paginiAMP Microprojet Final 22vvppolycoÎncă nu există evaluări
- Smart Traffic ControllerDocument23 paginiSmart Traffic ControllerShradha PriyaÎncă nu există evaluări
- For ProjectDocument22 paginiFor Projectsingh.suraj885150Încă nu există evaluări
- Eecs 4314 Conceptual Architecture ReportDocument15 paginiEecs 4314 Conceptual Architecture Reportapi-723823461Încă nu există evaluări
- Robust Control Platform For Robotic Arm Using ROSDocument4 paginiRobust Control Platform For Robotic Arm Using ROSInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Vehicle Trackingusing Io TDocument22 paginiVehicle Trackingusing Io TMD. Akif RahmanÎncă nu există evaluări
- Thai Nguyen University of Technology Faculty of International TrainingDocument16 paginiThai Nguyen University of Technology Faculty of International TrainingTrung HoàngÎncă nu există evaluări
- Iiot ReportDocument18 paginiIiot ReportAnkita PradhanÎncă nu există evaluări
- Capstone Phase - I - Review - 3Document18 paginiCapstone Phase - I - Review - 3Manjunath AbhiÎncă nu există evaluări
- Car and Padestrian Motion DetectionDocument23 paginiCar and Padestrian Motion DetectionAnkush BhaalÎncă nu există evaluări
- Bluetooth HotspotDocument94 paginiBluetooth Hotspothedaooatul57% (7)
- Final ProposalDocument13 paginiFinal ProposalAzizÎncă nu există evaluări
- Integration of C Programming and Iot in A Raspberry Pi Controlled Robot Car in A Freshmen Sophomore Engineering Core ClassDocument7 paginiIntegration of C Programming and Iot in A Raspberry Pi Controlled Robot Car in A Freshmen Sophomore Engineering Core Classmacacopaulista44Încă nu există evaluări
- Online Railway Reservation System ReportDocument35 paginiOnline Railway Reservation System ReportVipul Sharma67% (18)
- Accelerometer Controlled RobotDocument41 paginiAccelerometer Controlled RobotGauravDigariÎncă nu există evaluări
- Chapter FiveDocument4 paginiChapter FivebezawitÎncă nu există evaluări
- Foreign 2Document8 paginiForeign 2Rhodora A. BorjaÎncă nu există evaluări
- Your Big IdeaDocument18 paginiYour Big IdeaYuvatejasviÎncă nu există evaluări
- Group 1 ThesisDocument19 paginiGroup 1 Thesisपरीक्षा GurukulÎncă nu există evaluări
- Robot Operating System (ROS): The Complete Reference (Volume 6)De la EverandRobot Operating System (ROS): The Complete Reference (Volume 6)Încă nu există evaluări
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringDe la EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringÎncă nu există evaluări
- Designing SCADA Application Software: A Practical ApproachDe la EverandDesigning SCADA Application Software: A Practical ApproachÎncă nu există evaluări
- LogiComm Pattern ControlDocument2 paginiLogiComm Pattern ControlNordson Adhesive Dispensing SystemsÎncă nu există evaluări
- Contoh Dan Jawaban Soal Metode Elemen HinggaDocument16 paginiContoh Dan Jawaban Soal Metode Elemen HinggadhiafahheraÎncă nu există evaluări
- Winkler Spring ModelDocument7 paginiWinkler Spring ModelN Raghu VeerÎncă nu există evaluări
- CompressorDocument63 paginiCompressorRajneesh Patel100% (1)
- MALA MiniMIRA Technical SpecificationsDocument1 paginăMALA MiniMIRA Technical SpecificationsALfian FebriantoÎncă nu există evaluări
- (Applied Mathematical Sciences 35) Jack Carr (Auth.) - Applications of Centre Manifold Theory-Springer-Verlag New York (1981)Document156 pagini(Applied Mathematical Sciences 35) Jack Carr (Auth.) - Applications of Centre Manifold Theory-Springer-Verlag New York (1981)sridevi10masÎncă nu există evaluări
- Arlon Microwave MaterialsDocument18 paginiArlon Microwave MaterialsFelipe RabeloÎncă nu există evaluări
- One-Factor Short-Rate Models: 4.1. Vasicek ModelDocument8 paginiOne-Factor Short-Rate Models: 4.1. Vasicek ModelbobmezzÎncă nu există evaluări
- Elementary Linear Algebra: Howard Anton Chris RorresDocument78 paginiElementary Linear Algebra: Howard Anton Chris Rorresdeandra isabelleÎncă nu există evaluări
- File 00000003Document303 paginiFile 00000003monica laraÎncă nu există evaluări
- Chapter 1 BC SC Probe 8Document36 paginiChapter 1 BC SC Probe 8api-265180883Încă nu există evaluări
- Refratometro LSC 1022Document51 paginiRefratometro LSC 1022Letícia HaukÎncă nu există evaluări
- A Case Study On The Behaviour of A Deep Excavation in SandDocument11 paginiA Case Study On The Behaviour of A Deep Excavation in SandshrikanttekadeyahoocÎncă nu există evaluări
- Soal US GanjilDocument25 paginiSoal US GanjilRick DoÎncă nu există evaluări
- 2008 10 08 Product Show Mixing SpeakersDocument18 pagini2008 10 08 Product Show Mixing SpeakersyhjhzzjÎncă nu există evaluări
- MRG - D R.sirDocument30 paginiMRG - D R.sirPLASTIC LAB CBDÎncă nu există evaluări
- Solving Word Problems in ScienceDocument3 paginiSolving Word Problems in ScienceChrisel Luat LopezÎncă nu există evaluări
- Arc - Wleding Final Exam PDFDocument13 paginiArc - Wleding Final Exam PDFronaldo de guzmanÎncă nu există evaluări
- A7 - 20-SEP-2016 - RM001 - POCE5 - Module-4-Energy Balance-NumericalsDocument17 paginiA7 - 20-SEP-2016 - RM001 - POCE5 - Module-4-Energy Balance-NumericalssantoshÎncă nu există evaluări
- Black SmokerDocument25 paginiBlack SmokergilangÎncă nu există evaluări
- Report 2018-En-1 en 13071-1-3 Aero EnglishDocument16 paginiReport 2018-En-1 en 13071-1-3 Aero EnglishSlikCostaÎncă nu există evaluări
- Aestiva MRIDocument18 paginiAestiva MRImalamandeaceroÎncă nu există evaluări
- UBD Physics Unit 2 - Energy and The EnviornmentDocument5 paginiUBD Physics Unit 2 - Energy and The EnviornmentAlfred Melvin SolivaÎncă nu există evaluări
- Beginners DSLR Photography Printable Guide PDFDocument8 paginiBeginners DSLR Photography Printable Guide PDFShamith ManoharÎncă nu există evaluări
- Topic 8 TransformationDocument26 paginiTopic 8 Transformationayie4256017Încă nu există evaluări
- CTSH - Technical Bulletin 97-1Document4 paginiCTSH - Technical Bulletin 97-1hesigu14Încă nu există evaluări
- Method Statement For Bridge Load Test: 1. PurposeDocument10 paginiMethod Statement For Bridge Load Test: 1. PurposeAnonymous HN7WMQBmcÎncă nu există evaluări
- 106 - Suggested Answer Scheme Mock PSPM 2 Week 17 Set 2 PDFDocument10 pagini106 - Suggested Answer Scheme Mock PSPM 2 Week 17 Set 2 PDFSyaza IsmailÎncă nu există evaluări
- Shear Wall Design ReportDocument26 paginiShear Wall Design ReportAli ImranÎncă nu există evaluări
- Vortex-Induced Air EntrainmentDocument9 paginiVortex-Induced Air EntrainmentManikandanÎncă nu există evaluări