S-ar putea să vă placă și
- 325F Diagrama Electrico CHASIS PDFDocument8 pagini325F Diagrama Electrico CHASIS PDFRICHARDÎncă nu există evaluări
- The Normal Distribution and Its PropertiesDocument19 paginiThe Normal Distribution and Its Propertiessherdan genistonÎncă nu există evaluări
- Percentage Conversion Worksheet PDFDocument2 paginiPercentage Conversion Worksheet PDFJamie LeeÎncă nu există evaluări
- Hvac Water BalancingDocument5 paginiHvac Water BalancingAwais Jalali100% (2)
- Powerfactory 2020: Technical ReferenceDocument13 paginiPowerfactory 2020: Technical ReferenceDaniel ManjarresÎncă nu există evaluări
- Huawei Site Design GuidelineDocument7 paginiHuawei Site Design GuidelineHeru BudiantoÎncă nu există evaluări
- The Practical Reference Guide ForDocument21 paginiThe Practical Reference Guide ForIgnacio SantiagoÎncă nu există evaluări
- 4 SchedulingDocument37 pagini4 Schedulingreply2amit1986Încă nu există evaluări
- Operating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Document5 paginiOperating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Michael Beswick0% (1)
- Week 10 (Reference)Document63 paginiWeek 10 (Reference)azeemahmad570Încă nu există evaluări
- Performance Improvement Using CPU Scheduling Algorithm-SRTDocument4 paginiPerformance Improvement Using CPU Scheduling Algorithm-SRTInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Process Scheduling ReportDocument6 paginiProcess Scheduling ReportDevang KhandelwalÎncă nu există evaluări
- Scheduling AlgorithmDocument44 paginiScheduling AlgorithmGLENN ABACAHINÎncă nu există evaluări
- Operating System - SchedulingDocument24 paginiOperating System - SchedulingMatt PrestonÎncă nu există evaluări
- Operating System: CPU SchedulingDocument39 paginiOperating System: CPU SchedulingFaizan Ahmed100% (1)
- CPU SchedulingDocument57 paginiCPU SchedulingAnthony Cortez100% (1)
- Practice Exercises in OSDocument11 paginiPractice Exercises in OSNicole Angela Gila RamonidaÎncă nu există evaluări
- Cpu ShedulingDocument22 paginiCpu ShedulingRaviteja PapeneniÎncă nu există evaluări
- Part 12 - Scheduling AlgorithmsDocument20 paginiPart 12 - Scheduling AlgorithmsjhdmssÎncă nu există evaluări
- An Improved Priority Scheduling Algorithm Using Time Slice to Minimize Response TimeDocument5 paginiAn Improved Priority Scheduling Algorithm Using Time Slice to Minimize Response TimeSai AmithÎncă nu există evaluări
- CPU ScedulingDocument34 paginiCPU ScedulingAhmed TariqÎncă nu există evaluări
- CPU Scheduling AlgorithmsDocument3 paginiCPU Scheduling AlgorithmsSeaton HarnsÎncă nu există evaluări
- CPU Scheduling Algorithms: Preemptive vs NonpreemptiveDocument7 paginiCPU Scheduling Algorithms: Preemptive vs NonpreemptiveNguyễn Trí DũngÎncă nu există evaluări
- A Priority Based Round Robin CPU Scheduling Algorithm For Real Time SystemsDocument11 paginiA Priority Based Round Robin CPU Scheduling Algorithm For Real Time SystemsVũNhậtCátÎncă nu există evaluări
- Wa0081.Document32 paginiWa0081.satya narayanaÎncă nu există evaluări
- Scheduling 2Document17 paginiScheduling 2Debabrata DevÎncă nu există evaluări
- Os Unit IiDocument6 paginiOs Unit IiYuvaraj V, Assistant Professor, BCAÎncă nu există evaluări
- Scheduling AlgorithmsDocument75 paginiScheduling AlgorithmsGowtam ReddyÎncă nu există evaluări
- Bus Reservation System FinalDocument22 paginiBus Reservation System FinalVikranth RaoÎncă nu există evaluări
- Chapter 5: CPU SchedulingDocument55 paginiChapter 5: CPU SchedulingSaiVamsiÎncă nu există evaluări
- Osunit 2Document29 paginiOsunit 2BHARATHI TÎncă nu există evaluări
- CS571 Lecture4 Scheduling PDFDocument39 paginiCS571 Lecture4 Scheduling PDFHadcjj ManÎncă nu există evaluări
- Scheduling Algorithms SurveyDocument4 paginiScheduling Algorithms SurveyMathewÎncă nu există evaluări
- CPU SchedulingDocument6 paginiCPU SchedulingharshimogalapalliÎncă nu există evaluări
- Round Robin Scheduling Algorithm Explained in 40 CharactersDocument6 paginiRound Robin Scheduling Algorithm Explained in 40 CharactersSikandar Javid100% (1)
- Operating System Chapter 4Document7 paginiOperating System Chapter 4Hafsa SafdarÎncă nu există evaluări
- Efficient Round Robin Cpu Scheduling Algorithm For Operating SystemsDocument7 paginiEfficient Round Robin Cpu Scheduling Algorithm For Operating SystemsRamsés RamírezÎncă nu există evaluări
- Cse2005 - Operating SystemsDocument10 paginiCse2005 - Operating SystemsADITYA SINGHÎncă nu există evaluări
- Analysis and Comparison of CPU Scheduling AlgorithmsDocument5 paginiAnalysis and Comparison of CPU Scheduling AlgorithmsLoveBabbarÎncă nu există evaluări
- Analysis and Comparison of CPU Scheduling AlgorithmsDocument5 paginiAnalysis and Comparison of CPU Scheduling AlgorithmsShraddha pramod SonawaneÎncă nu există evaluări
- CPU SchedulingDocument13 paginiCPU Schedulingkalakar_2kÎncă nu există evaluări
- Process SchedullingDocument4 paginiProcess SchedullingzamakbÎncă nu există evaluări
- Report On Os SchedulingDocument5 paginiReport On Os SchedulingWinner WinnerÎncă nu există evaluări
- Process Schedduling-Synchronization and Deadlock Course MaterialDocument41 paginiProcess Schedduling-Synchronization and Deadlock Course MaterialShivani AppiÎncă nu există evaluări
- Exp3 1Document11 paginiExp3 1bangi arfatÎncă nu există evaluări
- OS Ch#5 CPU SchedulingDocument26 paginiOS Ch#5 CPU SchedulingAfza FatimaÎncă nu există evaluări
- CPU Scheduling Algorithms ExplainedDocument40 paginiCPU Scheduling Algorithms ExplainedMickÎncă nu există evaluări
- UU-COM-3003 Week 3 - Material NotesDocument14 paginiUU-COM-3003 Week 3 - Material NotesMogaji samuelÎncă nu există evaluări
- Slides Ch2 Process ManagementDocument41 paginiSlides Ch2 Process ManagementAbuky Ye AmanÎncă nu există evaluări
- CPU SchedualingDocument7 paginiCPU SchedualingTaimoor ZubairÎncă nu există evaluări
- Linux Scheduler and Scheduling TechniquesDocument8 paginiLinux Scheduler and Scheduling TechniquesnausicaatetooÎncă nu există evaluări
- CPU Scheduling Algorithms: Comparing Average Waiting TimesDocument5 paginiCPU Scheduling Algorithms: Comparing Average Waiting Timesseema syedÎncă nu există evaluări
- SchedulingDocument8 paginiSchedulingram_lalitÎncă nu există evaluări
- TheoryDocument2 paginiTheorynandini bhuvaÎncă nu există evaluări
- 3 - OS Process CPU SchedulingDocument38 pagini3 - OS Process CPU SchedulingKaushal AnandÎncă nu există evaluări
- Operating Systems: Chapter FourDocument27 paginiOperating Systems: Chapter FourFitawu TekolaÎncă nu există evaluări
- Cpu SchedDocument54 paginiCpu SchedTufail KhanÎncă nu există evaluări
- Unit 2 QSTN and AnswerDocument10 paginiUnit 2 QSTN and AnswerSangam MauryaÎncă nu există evaluări
- Rtos Module 2 Notes PDFDocument26 paginiRtos Module 2 Notes PDFBinroy TBÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument7 paginiNew Microsoft Office Word DocumentMangisetty SairamÎncă nu există evaluări
- Unit-4 - KOE062 Embededded System MaterialsDocument38 paginiUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadÎncă nu există evaluări
- An Optimized Round Robin Scheduling Algorithm For CPU Scheduling PDFDocument3 paginiAn Optimized Round Robin Scheduling Algorithm For CPU Scheduling PDFccalero78Încă nu există evaluări
- Unit 2Document39 paginiUnit 2Apeksha puppalwarÎncă nu există evaluări
- Cpu SchedDocument54 paginiCpu SchedNeinÎncă nu există evaluări
- A New Round Robin Based Scheduling Algorithm For Operating Systems: Dynamic Quantum Using The Mean Average. by Abbass NooNDocument6 paginiA New Round Robin Based Scheduling Algorithm For Operating Systems: Dynamic Quantum Using The Mean Average. by Abbass NooNmaythuxÎncă nu există evaluări
- Temporal QOS Management in Scientific Cloud Workflow SystemsDe la EverandTemporal QOS Management in Scientific Cloud Workflow SystemsÎncă nu există evaluări
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDe la EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesÎncă nu există evaluări
- DPWH Design Assessment ChecklistDocument18 paginiDPWH Design Assessment ChecklistGeovanni DumpasanÎncă nu există evaluări
- Reliability Prediction Studies On Electrical Insulation Navy Summary Report NAVALDocument142 paginiReliability Prediction Studies On Electrical Insulation Navy Summary Report NAVALdennisroldanÎncă nu există evaluări
- Carbon 06 00052Document17 paginiCarbon 06 00052Elbahi DjaalabÎncă nu există evaluări
- Astm-e855 Изгиб МеталлаDocument8 paginiAstm-e855 Изгиб МеталлаАлесь БуяковÎncă nu există evaluări
- HP Application Lifecycle Management Readme: What's New Installation InstructionsDocument36 paginiHP Application Lifecycle Management Readme: What's New Installation InstructionsBrandon GarciaÎncă nu există evaluări
- How To Import Excel Into LabviewDocument3 paginiHow To Import Excel Into LabviewDan JohnsonÎncă nu există evaluări
- UDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFDocument14 paginiUDP Control and Monitoring With PIC Microcontroller - StudentCompanion PDFVport PortÎncă nu există evaluări
- Optical VibrationDocument6 paginiOptical VibrationKarthick VelayuthamÎncă nu există evaluări
- Vendor Information Vishay BLH Handbook TC0013 Solutions For Process Weighing and Force Measurement Electronic Weigh SystemsDocument59 paginiVendor Information Vishay BLH Handbook TC0013 Solutions For Process Weighing and Force Measurement Electronic Weigh SystemsAndrew JacksonÎncă nu există evaluări
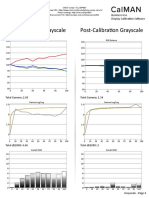
- TCL 55P607 CNET Review Calibration ResultsDocument3 paginiTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierÎncă nu există evaluări
- Awk Quick GuideDocument42 paginiAwk Quick GuideMurat TanırÎncă nu există evaluări
- FGS80HAS 100 V 50-60 HZ 1Document3 paginiFGS80HAS 100 V 50-60 HZ 1Tomas GuaiquireÎncă nu există evaluări
- 0580 w13 QP 41Document20 pagini0580 w13 QP 41Haider AliÎncă nu există evaluări
- PSAB Product ManualDocument4 paginiPSAB Product ManualArnold StevenÎncă nu există evaluări
- Guide For Dynamic Report Generator - EndsfsdfsdfsdfsdfDocument15 paginiGuide For Dynamic Report Generator - Endsfsdfsdfsdfsdfmtech structuresÎncă nu există evaluări
- Atht Model Ques 2017Document1 paginăAtht Model Ques 2017Jeyakumar VenugopalÎncă nu există evaluări
- Wiring Diagram SCH17: Service InformationDocument16 paginiWiring Diagram SCH17: Service Informationابو حمزة صبريÎncă nu există evaluări
- Engineering Chemistry Lab Osmania UniversityDocument83 paginiEngineering Chemistry Lab Osmania UniversityMujtaba khanÎncă nu există evaluări
- One Plus 7Document114 paginiOne Plus 7Priyanka ChudasamaÎncă nu există evaluări
- Hydraulic Filter ReportDocument6 paginiHydraulic Filter ReportSandrock_01sr2Încă nu există evaluări
- E16 8 2Document4 paginiE16 8 2Branko FerenčakÎncă nu există evaluări
- Player PrefsDocument1 paginăPlayer PrefsHafiz AbdulwahabÎncă nu există evaluări
- Surge Current Protection Using SuperconductorDocument25 paginiSurge Current Protection Using SuperconductorAbhishek Walter PaulÎncă nu există evaluări