S-ar putea să vă placă și
- Foundation Course for Advanced Computer StudiesDe la EverandFoundation Course for Advanced Computer StudiesÎncă nu există evaluări
- Newbie's Guide To AVR Interrupts: Part 1: What Are Interrupts?Document3 paginiNewbie's Guide To AVR Interrupts: Part 1: What Are Interrupts?Ali JalilaraziÎncă nu există evaluări
- RS232 Serial Communications With AVR MicrocontrollersDocument3 paginiRS232 Serial Communications With AVR MicrocontrollersEngr Waqar Ahmed RajputÎncă nu există evaluări
- HW2 Operating SystemsDocument9 paginiHW2 Operating SystemsSainadh GodenaÎncă nu există evaluări
- Topic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Document94 paginiTopic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Aya AmirÎncă nu există evaluări
- Avr CoreDocument145 paginiAvr CoreStephanie FloresÎncă nu există evaluări
- Laboratorio DroneDocument7 paginiLaboratorio DroneFernando MontanhaÎncă nu există evaluări
- Why AvrDocument7 paginiWhy AvrPurav VadodariaÎncă nu există evaluări
- RISCV Inrerrupts PDFDocument10 paginiRISCV Inrerrupts PDFJenia GershikovÎncă nu există evaluări
- TI RTOS Zero LatencyDocument24 paginiTI RTOS Zero LatencysarmaÎncă nu există evaluări
- Understanding The TMS320F2812 Interrupt SystemDocument20 paginiUnderstanding The TMS320F2812 Interrupt SystemPantech ProLabs India Pvt LtdÎncă nu există evaluări
- TechshopBD Version User ManualDocument14 paginiTechshopBD Version User ManualMd AssadÎncă nu există evaluări
- LDmicro - Manual InglesDocument17 paginiLDmicro - Manual InglesMoacyr_Jr0% (1)
- Signaling &interrupts in The Operating SystemDocument10 paginiSignaling &interrupts in The Operating SystemRagmahale RohitÎncă nu există evaluări
- The 8086 Interrupt Mechanism: The 8259A PICDocument14 paginiThe 8086 Interrupt Mechanism: The 8259A PICSatishÎncă nu există evaluări
- Embedded CDocument33 paginiEmbedded CGabriel de AlmeidaÎncă nu există evaluări
- Part-4-Timer and InterruptDocument23 paginiPart-4-Timer and InterruptN26094354鐘筠凱Încă nu există evaluări
- Remote BOF ExplanationDocument11 paginiRemote BOF Explanationlev bellÎncă nu există evaluări
- Introduction To PIC Interrupts and Their Handling in CDocument41 paginiIntroduction To PIC Interrupts and Their Handling in CveerakumarsÎncă nu există evaluări
- RTSLab 1Document9 paginiRTSLab 1Andrew WalleyÎncă nu există evaluări
- CS2106 Lab 3Document4 paginiCS2106 Lab 3weitsangÎncă nu există evaluări
- AVR Microcontroller Fuse Bits Configuration CreatiDocument9 paginiAVR Microcontroller Fuse Bits Configuration CreatiFumino MizutoriÎncă nu există evaluări
- Man ArduinoDocument9 paginiMan Arduinomizar_10Încă nu există evaluări
- Ge423 Lab4Document13 paginiGe423 Lab4lephuducÎncă nu există evaluări
- Tinaware LaunchpadDocument11 paginiTinaware Launchpadryan cooper100% (1)
- Interrupts and ExceptionsDocument7 paginiInterrupts and ExceptionsProdip KunduÎncă nu există evaluări
- Egg Timer TutorialDocument8 paginiEgg Timer Tutorials3th137Încă nu există evaluări
- Basic Interrupts and IoDocument16 paginiBasic Interrupts and IoM70AB2Încă nu există evaluări
- Stepper MotorDocument12 paginiStepper MotorAnonymous QIuAGIadXmÎncă nu există evaluări
- Simple Delay TutorialDocument3 paginiSimple Delay TutorialslavkÎncă nu există evaluări
- Unit-3 Part-A MPMCDocument17 paginiUnit-3 Part-A MPMCsubbaraoÎncă nu există evaluări
- Lecture # 4Document8 paginiLecture # 4api-3812413Încă nu există evaluări
- Shellcoding in LinuxDocument15 paginiShellcoding in Linuxkartikey jainÎncă nu există evaluări
- Industrial Security System Using Microcontroller Regulated Power SupplyDocument6 paginiIndustrial Security System Using Microcontroller Regulated Power Supplynaveenraj111Încă nu există evaluări
- COMP427 Embedded Systems: Lab 2. Software Interrupt Programming With ARMDocument4 paginiCOMP427 Embedded Systems: Lab 2. Software Interrupt Programming With ARMWong_Ngee_SengÎncă nu există evaluări
- Lab 3: Multiprogramming in Nachos: CMSC 442 Due: Monday, Nov. 2 by 11:59:59PmDocument6 paginiLab 3: Multiprogramming in Nachos: CMSC 442 Due: Monday, Nov. 2 by 11:59:59PmpÎncă nu există evaluări
- Interrupts in 8086 MicroprocessorDocument8 paginiInterrupts in 8086 MicroprocessorGemechis GurmesaÎncă nu există evaluări
- Laboratory3 ECIDocument12 paginiLaboratory3 ECIfa20-bce-046Încă nu există evaluări
- Sim Guide For Y86 Processor SimulatorsDocument14 paginiSim Guide For Y86 Processor Simulators50hyeahÎncă nu există evaluări
- Microprocessor Systems (LAB) : SESSION 98/99Document4 paginiMicroprocessor Systems (LAB) : SESSION 98/99piyushpandeyÎncă nu există evaluări
- Laboratory3 Marking Scheme PDFDocument13 paginiLaboratory3 Marking Scheme PDFAmna EhtshamÎncă nu există evaluări
- Tutorial ProjectDocument16 paginiTutorial ProjectMuhammadNizarArifansyahÎncă nu există evaluări
- Laboratory3 Marking SchemeDocument13 paginiLaboratory3 Marking SchemeAmna EhtshamÎncă nu există evaluări
- 29C512Document18 pagini29C512kklos1Încă nu există evaluări
- Interrupt ArchitectureDocument3 paginiInterrupt ArchitectureAnonymous XZUyueNÎncă nu există evaluări
- Experiment - 5 InterruptsDocument4 paginiExperiment - 5 InterruptsEC100 Diya SoniÎncă nu există evaluări
- 7.PIC 8259A (Shortened)Document19 pagini7.PIC 8259A (Shortened)Akram TahaÎncă nu există evaluări
- Software and Hardware Interrupt ApplicationsDocument10 paginiSoftware and Hardware Interrupt Applicationssatyanarayana12Încă nu există evaluări
- 8086 Interrupts and Interrupt ResponsesDocument8 pagini8086 Interrupts and Interrupt ResponsesNiharika Korukonda100% (1)
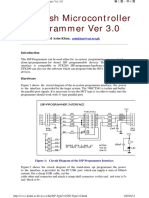
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDocument4 paginiISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićÎncă nu există evaluări
- Aix UnixDocument3 paginiAix UnixBenigno D. AquinoÎncă nu există evaluări
- Lecture 7Document26 paginiLecture 7ShazidÎncă nu există evaluări
- Frequently Asked Questions - AVRDocument18 paginiFrequently Asked Questions - AVRSagar Gupta100% (2)
- Network Testing & Debugging: Jubna.T NO:22Document44 paginiNetwork Testing & Debugging: Jubna.T NO:22BaneeIshaqueKÎncă nu există evaluări
- Little TextDocument4 paginiLittle TextxuboyuansiquanÎncă nu există evaluări
- Assembly Language Short Notes by VuDocument16 paginiAssembly Language Short Notes by VuSyed HadiÎncă nu există evaluări
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDe la EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationÎncă nu există evaluări
- SP3DProgGuide PDFDocument194 paginiSP3DProgGuide PDFBracusÎncă nu există evaluări
- Symfony Cookbook 2.1Document292 paginiSymfony Cookbook 2.1Angel Leonardo BiancoÎncă nu există evaluări
- Server LogDocument4 paginiServer LogBogdanÎncă nu există evaluări
- Passwords in The Air - Harvesting Wi-Fi Credentials From SmartCfg ProvisioningDocument11 paginiPasswords in The Air - Harvesting Wi-Fi Credentials From SmartCfg ProvisioningJexiaÎncă nu există evaluări
- Node - Js v6.10Document655 paginiNode - Js v6.10Beto RasÎncă nu există evaluări
- Fanuc Focas Ethernet ManualDocument70 paginiFanuc Focas Ethernet Manualisaias machadoÎncă nu există evaluări
- Creating A Mathcad DLL With Visual C++Document1 paginăCreating A Mathcad DLL With Visual C++Ernesto MoraÎncă nu există evaluări
- Sla OrialDocument43 paginiSla OrialISE RNSITÎncă nu există evaluări
- Spru422j - Programmer's ReferenceDocument144 paginiSpru422j - Programmer's ReferenceCarlos MejíasÎncă nu există evaluări
- ARM Optimizing C/C++ CompilerDocument210 paginiARM Optimizing C/C++ CompilerMădălin PetcuÎncă nu există evaluări
- SAPx Getting Started PDFDocument43 paginiSAPx Getting Started PDFSigurður N. ÞorleifssonÎncă nu există evaluări
- User Manual EM Test ISMIECDocument60 paginiUser Manual EM Test ISMIECjdnwemcÎncă nu există evaluări
- SS-Lab Manual PDFDocument57 paginiSS-Lab Manual PDFAbhishek SukumarÎncă nu există evaluări
- The Digital Library Project VOLUME 1: The World of Knowbots (Draft)Document48 paginiThe Digital Library Project VOLUME 1: The World of Knowbots (Draft)Md Kamruzzaman KhanÎncă nu există evaluări
- EGL Referene GuideDocument980 paginiEGL Referene GuideJacob SamuelÎncă nu există evaluări
- Electrical Routing GuideDocument14 paginiElectrical Routing Guideclaudiogut123Încă nu există evaluări
- MAAB Control Algorithm Modeling Guidelines Using MATLAB Simulink and StateflowDocument386 paginiMAAB Control Algorithm Modeling Guidelines Using MATLAB Simulink and StateflowCiprian AndriciÎncă nu există evaluări
- Aocl Programming GuideDocument50 paginiAocl Programming GuideHugo ContrerasÎncă nu există evaluări
- Oracle Forms Look & Feel Project: Developer GuideDocument45 paginiOracle Forms Look & Feel Project: Developer GuideAHMED MUFLEHÎncă nu există evaluări
- Developing With AngularDocument481 paginiDeveloping With AngularAnh Nguyen100% (1)
- Emu LogDocument11 paginiEmu LogPakde GuhÎncă nu există evaluări
- Assignment-1: OF CSE 406Document8 paginiAssignment-1: OF CSE 406hisatish11Încă nu există evaluări
- Pi MSPDocument93 paginiPi MSPsinanovicismarÎncă nu există evaluări
- Developer's Note On Quantum EspressoDocument39 paginiDeveloper's Note On Quantum EspressoMatsushima KhodaijiÎncă nu există evaluări
- R For Windows UsersDocument35 paginiR For Windows UsersefiolÎncă nu există evaluări
- WB-Mech 120 Ch02 BasicsDocument36 paginiWB-Mech 120 Ch02 BasicsmrezaianÎncă nu există evaluări
- Mad Unit2Document101 paginiMad Unit2Lakshmi M100% (1)
- AYUDA MikroC 5.6 PDFDocument996 paginiAYUDA MikroC 5.6 PDFpierdonne50% (2)
- Python Project: How To Manage A Speed Sensor With A Labjack U3 HVDocument9 paginiPython Project: How To Manage A Speed Sensor With A Labjack U3 HVSamarth ChauhanÎncă nu există evaluări
- Introduction To C#: Tom Roeder CS 215 2006faDocument25 paginiIntroduction To C#: Tom Roeder CS 215 2006faAnonymous V7P5fNQIÎncă nu există evaluări