S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Relative Wood Ratings & Properties: Alder, Red Alder, RedDocument1 paginăRelative Wood Ratings & Properties: Alder, Red Alder, Reddlstone100% (1)
- Industrial Crimp Quality HandbookDocument27 paginiIndustrial Crimp Quality Handbookvggalileo100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CAP The Journey of FlightDocument646 paginiCAP The Journey of Flightloicfreville50% (2)
- Techinical Information Handbook Wire and Cable PDFDocument328 paginiTechinical Information Handbook Wire and Cable PDFctsak83% (6)
- ATP InfoDocument22 paginiATP InfoJohn JenningsÎncă nu există evaluări
- Aircraft Design ProjectDocument37 paginiAircraft Design ProjectAdrian ArasuÎncă nu există evaluări
- Barnes Molding & Casting ProductsDocument68 paginiBarnes Molding & Casting Productsdlstone100% (1)
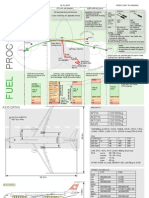
- A320 Powerplant NotesDocument18 paginiA320 Powerplant NotesMuvinda JayasingheÎncă nu există evaluări
- Standard Hook-Up Wires & Cables For ElectronicsDocument124 paginiStandard Hook-Up Wires & Cables For ElectronicsdlstoneÎncă nu există evaluări
- Columbia Accident Investigation Board Volume Five Book ThreeDocument685 paginiColumbia Accident Investigation Board Volume Five Book ThreeBob AndrepontÎncă nu există evaluări
- Bayer Material Science Thermoplastic Joining TechniquesDocument38 paginiBayer Material Science Thermoplastic Joining TechniquesdlstoneÎncă nu există evaluări
- CAE 600XR FTD Sell Sheet WATS April 2018 Final PDFDocument2 paginiCAE 600XR FTD Sell Sheet WATS April 2018 Final PDFrubiodegoÎncă nu există evaluări
- A330 Etops DataDocument1 paginăA330 Etops DataMiroslav Stoyanov67% (3)
- Weapon SystemsDocument14 paginiWeapon SystemsschultzÎncă nu există evaluări
- Bell 412 Pilot Training Manual: FlightsafetyDocument601 paginiBell 412 Pilot Training Manual: FlightsafetyDiego Lopez ChampinÎncă nu există evaluări
- Seismic Design and Retrofit of Piping SystemsDocument119 paginiSeismic Design and Retrofit of Piping Systemsv100% (1)
- Hazardous Areas Technical GuideDocument90 paginiHazardous Areas Technical GuidedlstoneÎncă nu există evaluări
- Eduard 1153XDocument4 paginiEduard 1153XGuillermo González Castillo50% (2)
- Aircraft Design Project 1Document74 paginiAircraft Design Project 1sangeetha_baskaran96100% (1)
- Nasa STD 8739 4Document103 paginiNasa STD 8739 4dlstoneÎncă nu există evaluări
- Example: Terminal StackingDocument40 paginiExample: Terminal StackingNick NumlkÎncă nu există evaluări
- Allied Machine & Engineering T-A Drilling System CatalogDocument128 paginiAllied Machine & Engineering T-A Drilling System CatalogdlstoneÎncă nu există evaluări
- Low Molecular Organic Acids in Sod-Podsol Forest SoilsDocument10 paginiLow Molecular Organic Acids in Sod-Podsol Forest SoilsdlstoneÎncă nu există evaluări
- Elbit Hermes 900Document4 paginiElbit Hermes 900Amedeo FAlcoÎncă nu există evaluări
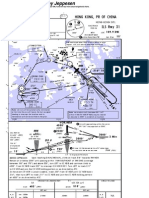
- JeppChart 11-1Document1 paginăJeppChart 11-1Brian Izarnótegui AltamiranoÎncă nu există evaluări
- British Aerospace Nimrod AEW3Document13 paginiBritish Aerospace Nimrod AEW3MateiÎncă nu există evaluări
- LYCAA - PEL-Form - 05 - REV 03Document9 paginiLYCAA - PEL-Form - 05 - REV 03Salah Ali SalihÎncă nu există evaluări
- Flight StarDocument3 paginiFlight Starmilek2910Încă nu există evaluări
- U.S. DOT Air Travel Consumer ReportDocument54 paginiU.S. DOT Air Travel Consumer ReportManny FantisÎncă nu există evaluări
- FS Passengers P3D ManualDocument28 paginiFS Passengers P3D Manualrildin100% (1)
- Engine Failure/ /shut Down After V1: Standar Operational ProceduresDocument7 paginiEngine Failure/ /shut Down After V1: Standar Operational ProceduresAlëxândër KošëÎncă nu există evaluări
- NASA 120305main FS-051-DFRCDocument1 paginăNASA 120305main FS-051-DFRCNASAdocumentsÎncă nu există evaluări
- Freedoms of The Air PDFDocument3 paginiFreedoms of The Air PDFChristine Marie F PacolÎncă nu există evaluări
- February 26 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsDocument6 paginiFebruary 26 Homework Solutions: Mechanical Engineering 390 Fluid Mechanicsshun84Încă nu există evaluări
- Fact - Ils Rwy 01 - Ils-01 10may2007Document1 paginăFact - Ils Rwy 01 - Ils-01 10may2007Richard FloydÎncă nu există evaluări
- Flight Schedule NB - Updated To 07th Nov 2014Document6 paginiFlight Schedule NB - Updated To 07th Nov 2014DungLeÎncă nu există evaluări
- 505 FM 01 S01Document18 pagini505 FM 01 S01Are Gee100% (1)
- Helideck Hand SignalsDocument5 paginiHelideck Hand Signalsromerov24Încă nu există evaluări
- FraseologiaDocument52 paginiFraseologiaBruno GanicocheÎncă nu există evaluări
- Matching PlotDocument15 paginiMatching PlotUmer CheemaÎncă nu există evaluări
- Chinook Crash QuestionsDocument3 paginiChinook Crash QuestionsNevinÎncă nu există evaluări
- Boarding PassDocument2 paginiBoarding PassSteffany AseretÎncă nu există evaluări