S-ar putea să vă placă și
- Axminster 08 - Routing - p299-p330Document32 paginiAxminster 08 - Routing - p299-p330Pierre799esÎncă nu există evaluări
- 1kw Mosfet Amp PDFDocument17 pagini1kw Mosfet Amp PDFModesto Marcos Calderon Cruz100% (2)
- USB Motion Card STB4100 ManualDocument15 paginiUSB Motion Card STB4100 ManualCZRYEVEÎncă nu există evaluări
- MSD50DDocument43 paginiMSD50DGessybell UrbinaÎncă nu există evaluări
- Schematic-X - Schematics DownloadDocument2 paginiSchematic-X - Schematics DownloadLutfi AzizÎncă nu există evaluări
- Welborne Labs DRD 45 Amp Solid StateDocument23 paginiWelborne Labs DRD 45 Amp Solid Statejason23456789Încă nu există evaluări
- X-Fi ™ Prelude 7.1: Owner's ManualDocument37 paginiX-Fi ™ Prelude 7.1: Owner's ManualJordan Nevitt100% (1)
- Philips Tube CodesDocument14 paginiPhilips Tube CodesTortie-BoyÎncă nu există evaluări
- Acer SchematicsDocument48 paginiAcer Schematicsadyxyy1Încă nu există evaluări
- Readme Gcoil PDFDocument3 paginiReadme Gcoil PDFsEbyRESÎncă nu există evaluări
- HM CNC ROUTER MANUAL For Carving Mashine PDFDocument112 paginiHM CNC ROUTER MANUAL For Carving Mashine PDFRadovan KnezevicÎncă nu există evaluări
- Midas VeniceDocument46 paginiMidas Venicemirescualin100% (1)
- Vestax PCV 002 DJ Mixer Service ManualDocument17 paginiVestax PCV 002 DJ Mixer Service ManualAnonymous ec2P0F5iKXÎncă nu există evaluări
- XM Gtx6040 Sony SchematicsDocument22 paginiXM Gtx6040 Sony SchematicsPaulo DinisÎncă nu există evaluări
- Kit Audio 500w MivaDocument1 paginăKit Audio 500w MivaGeorge MucutaÎncă nu există evaluări
- JVC KW Avx738 Manual de UsuarioDocument147 paginiJVC KW Avx738 Manual de UsuariofrancisibaÎncă nu există evaluări
- Apple IMac A1311 K74 MLB 051-8337 SchematicsDocument92 paginiApple IMac A1311 K74 MLB 051-8337 SchematicsJefferson MachadoÎncă nu există evaluări
- Asus X505BP Rev2.0Document97 paginiAsus X505BP Rev2.0santiago rodriguezÎncă nu există evaluări
- Kenwood Hard To Find Wiring ListDocument6 paginiKenwood Hard To Find Wiring ListTodd HoferÎncă nu există evaluări
- Kenwood Models.: Kenwood Mc30-Mc35 MicrophoneDocument9 paginiKenwood Models.: Kenwood Mc30-Mc35 MicrophoneRigoberto Martinez LopezÎncă nu există evaluări
- The Latest 3rd Generation Revolutionary TB660HG 3 Axis Board DescriptionDocument4 paginiThe Latest 3rd Generation Revolutionary TB660HG 3 Axis Board DescriptionAnonymous t83HjAvXÎncă nu există evaluări
- 5v and 12v 1a Output Power Supply With Onboard Transformer 1Document1 pagină5v and 12v 1a Output Power Supply With Onboard Transformer 1Sundar KrishÎncă nu există evaluări
- Aculaser c2900nDocument681 paginiAculaser c2900nMikhailÎncă nu există evaluări
- Kenwood TS440Document13 paginiKenwood TS440Ambo PbÎncă nu există evaluări
- Sony XM Zr602Document20 paginiSony XM Zr602Josue AlbaÎncă nu există evaluări
- Elonics E4000 Low Power CMOS Multi Band Tuner DatasheetDocument59 paginiElonics E4000 Low Power CMOS Multi Band Tuner DatasheetbenryanauÎncă nu există evaluări
- KIP 3100 Parts Manual Ver 2 0Document111 paginiKIP 3100 Parts Manual Ver 2 0Antonio DominguezÎncă nu există evaluări
- JBL PRX 612MDocument2 paginiJBL PRX 612MDiago SofranoÎncă nu există evaluări
- KFL 000Document1 paginăKFL 000Fahreza HardiputraÎncă nu există evaluări
- TB6560 - T4 - V4 4 Axis CNC Dirver Manual and TB6560-T4-V3 4 Axis CNC Dirver Manual 20110510Document16 paginiTB6560 - T4 - V4 4 Axis CNC Dirver Manual and TB6560-T4-V3 4 Axis CNC Dirver Manual 20110510Ersin CelebiÎncă nu există evaluări
- 5.4l Engine Pg4-8 Bolt Torque SpecsDocument5 pagini5.4l Engine Pg4-8 Bolt Torque SpecsNuty IonutÎncă nu există evaluări
- Ozito Prr-1200 ManualDocument19 paginiOzito Prr-1200 ManualRob VÎncă nu există evaluări
- Apple Macbook Pro 15 A1286 MLB, K18 051-8504 820-2850 WHITE ARROW (02!01!10) SchematicsDocument101 paginiApple Macbook Pro 15 A1286 MLB, K18 051-8504 820-2850 WHITE ARROW (02!01!10) SchematicsMarcelo J SolanoÎncă nu există evaluări
- Description Features: PT6311 VFD Driver/Controller ICDocument22 paginiDescription Features: PT6311 VFD Driver/Controller ICMaciek KuśnierzÎncă nu există evaluări
- Map3202sirh Ic6900Document1 paginăMap3202sirh Ic6900rammerDankovÎncă nu există evaluări
- Condensing Unit Vertical Discharge 60 HZ R410A: 36KBTU Model Has A Different GrillDocument1 paginăCondensing Unit Vertical Discharge 60 HZ R410A: 36KBTU Model Has A Different GrilljuanÎncă nu există evaluări
- Etc Smartbar PDFDocument2 paginiEtc Smartbar PDFEmnineÎncă nu există evaluări
- Contactless Tachometer With Speed ControlDocument30 paginiContactless Tachometer With Speed ControlSareesh Nambiar50% (2)
- Aiwa nsx-r71 cx-nr71 397Document57 paginiAiwa nsx-r71 cx-nr71 397KarenKateSalasAguilarÎncă nu există evaluări
- Service Manual: Monitor With DVD ReceiverDocument99 paginiService Manual: Monitor With DVD ReceiverDumur SaileshÎncă nu există evaluări
- DUALPULSEbom 4Document1 paginăDUALPULSEbom 4FritzÎncă nu există evaluări
- Grade 10 Automotive Tve q1wk8Document17 paginiGrade 10 Automotive Tve q1wk8Precious Dorothy Tolentino100% (1)
- Philips Cd104 Service ManualDocument86 paginiPhilips Cd104 Service ManualRick NastiÎncă nu există evaluări
- Welborne Labs Apollo - 2xDocument28 paginiWelborne Labs Apollo - 2xjason23456789Încă nu există evaluări
- Turnstile 61-200-3103 User ManualDocument20 paginiTurnstile 61-200-3103 User ManualGuillermo GarciaÎncă nu există evaluări
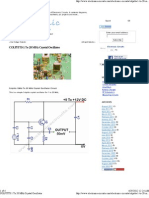
- COLPITTS 1 To 20 MHZ Crystal Oscillator PDFDocument4 paginiCOLPITTS 1 To 20 MHZ Crystal Oscillator PDFArun Dutta100% (1)
- Todo Sobre Sintonizadores EquivalenciasDocument39 paginiTodo Sobre Sintonizadores EquivalenciassilvertronicÎncă nu există evaluări
- Apple Macbook A1181 13 K36A MLB 051-7559 820-2279 RevH (02-15-2008) Schematics PDFDocument76 paginiApple Macbook A1181 13 K36A MLB 051-7559 820-2279 RevH (02-15-2008) Schematics PDFJerzy LisowskiÎncă nu există evaluări
- Grade 10 Automotive Tve q1wk6Document10 paginiGrade 10 Automotive Tve q1wk6Precious Dorothy TolentinoÎncă nu există evaluări
- Parts Reference List: MODEL: HL-1650/1670NDocument28 paginiParts Reference List: MODEL: HL-1650/1670NbuhesasÎncă nu există evaluări
- Rotel RB 1080 Service ManualDocument6 paginiRotel RB 1080 Service Manualsandy nÎncă nu există evaluări
- TC-L42D2: 42 Inch Class 1080p LCD HDTVDocument73 paginiTC-L42D2: 42 Inch Class 1080p LCD HDTVTran MinhÎncă nu există evaluări
- 50W Hi-Fi Power Audio Amplifier TDA7294 PDFDocument5 pagini50W Hi-Fi Power Audio Amplifier TDA7294 PDFciamponi1959100% (1)
- Tone Control - Electronic CircuitsDocument5 paginiTone Control - Electronic CircuitsCelo GontiñasÎncă nu există evaluări
- Motherboard Specifications WJ5 (Leon) - Omni 120 1111laDocument5 paginiMotherboard Specifications WJ5 (Leon) - Omni 120 1111lacharlesÎncă nu există evaluări
- Max 2981Document13 paginiMax 2981Jamila RobinsonÎncă nu există evaluări
- BHSS 750w Step Servo PDFDocument20 paginiBHSS 750w Step Servo PDFDeepak RainaÎncă nu există evaluări
- Digiflex® Digital Servo Drives With Canopen Interface MODEL: DC201E30A40NACDocument13 paginiDigiflex® Digital Servo Drives With Canopen Interface MODEL: DC201E30A40NACElectromateÎncă nu există evaluări
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 paginiCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoÎncă nu există evaluări
- AEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFDocument8 paginiAEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFNguyen Quang VinhÎncă nu există evaluări
- Round Off & SFDocument2 paginiRound Off & SFAndy KristiantoÎncă nu există evaluări
- Enable Discovery Other ComputerDocument1 paginăEnable Discovery Other ComputerAndy KristiantoÎncă nu există evaluări
- DX DiagDocument38 paginiDX DiagAndy KristiantoÎncă nu există evaluări
- Enable Discovery Other ComputerDocument16 paginiEnable Discovery Other ComputerAndy KristiantoÎncă nu există evaluări
- Balanced ScorecardDocument12 paginiBalanced ScorecardshdevrupamÎncă nu există evaluări
- KlikBCA Individual Save PageDocument1 paginăKlikBCA Individual Save PageAndy KristiantoÎncă nu există evaluări
- Adrian GanjarDocument1 paginăAdrian GanjarAndy KristiantoÎncă nu există evaluări
- 5614 Creating A Portable Windows 10 Environment External WSGDocument8 pagini5614 Creating A Portable Windows 10 Environment External WSGrdos14Încă nu există evaluări
- 1oexy: Shipped To Shipment Info Payment InfoDocument1 pagină1oexy: Shipped To Shipment Info Payment InfoAndy KristiantoÎncă nu există evaluări
- Form Teknisi & PartDocument24 paginiForm Teknisi & PartAndy KristiantoÎncă nu există evaluări
- KX-TDA100D: User ManualDocument240 paginiKX-TDA100D: User ManualmaungÎncă nu există evaluări
- (183329623) 201401222200 - Invoice-1oexyDocument1 pagină(183329623) 201401222200 - Invoice-1oexyAndy KristiantoÎncă nu există evaluări
- 201.106.5-002 Release NotesDocument1 pagină201.106.5-002 Release NotesAndy KristiantoÎncă nu există evaluări
- 201.106.5-002 Release NotesDocument1 pagină201.106.5-002 Release NotesAndy KristiantoÎncă nu există evaluări
- Competent Testing Requirements As Per Factory ActDocument3 paginiCompetent Testing Requirements As Per Factory Actamit_lunia100% (1)
- Classroom Activty Rubrics Classroom Activty Rubrics: Total TotalDocument1 paginăClassroom Activty Rubrics Classroom Activty Rubrics: Total TotalMay Almerez- WongÎncă nu există evaluări
- Install NoteDocument1 paginăInstall NoteJose Ramon RozasÎncă nu există evaluări
- The 100 Best Books For 1 Year Olds: Board Book HardcoverDocument17 paginiThe 100 Best Books For 1 Year Olds: Board Book Hardcovernellie_74023951Încă nu există evaluări
- Enterprise GRC Solutions 2012 Executive SummaryDocument5 paginiEnterprise GRC Solutions 2012 Executive SummarySanath FernandoÎncă nu există evaluări
- Blank Freeway Walls Replaced With Local Designs - Press EnterpriseDocument5 paginiBlank Freeway Walls Replaced With Local Designs - Press EnterpriseEmmanuel Cuauhtémoc Ramos BarajasÎncă nu există evaluări
- Centric WhitepaperDocument25 paginiCentric WhitepaperFadhil ArsadÎncă nu există evaluări
- Reaffirmed 1998Document13 paginiReaffirmed 1998builconsÎncă nu există evaluări
- Chemistry For Changing Times 14th Edition Hill Mccreary Solution ManualDocument24 paginiChemistry For Changing Times 14th Edition Hill Mccreary Solution ManualElaineStewartieog100% (50)
- Course 3 Mathematics Common Core Workbook AnswersDocument4 paginiCourse 3 Mathematics Common Core Workbook Answerspqdgddifg100% (1)
- Code of Conduct For Public OfficialDocument17 paginiCode of Conduct For Public OfficialHaÎncă nu există evaluări
- Sheridan Specialized Building Products LLC - Queue Solutions Commercial Proposal by SeQure TechnologiesDocument6 paginiSheridan Specialized Building Products LLC - Queue Solutions Commercial Proposal by SeQure Technologiessailesh psÎncă nu există evaluări
- An Enhanced RFID-Based Authentication Protocol Using PUF For Vehicular Cloud ComputingDocument18 paginiAn Enhanced RFID-Based Authentication Protocol Using PUF For Vehicular Cloud Computing0dayÎncă nu există evaluări
- MnemonicsDocument1 paginăMnemonicsSunil Boyz-uÎncă nu există evaluări
- The Future Mixed TensesDocument4 paginiThe Future Mixed TensesChernykh Vitaliy100% (1)
- Substitution Reactions - PMDocument64 paginiSubstitution Reactions - PMprasoon jhaÎncă nu există evaluări
- Imaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFDocument3.130 paginiImaging Anatomy Brain and Spine Osborn 1 Ed 2020 PDFthe gaangster100% (1)
- Anglo Afghan WarsDocument79 paginiAnglo Afghan WarsNisar AhmadÎncă nu există evaluări
- The Life Cycle of Brent FieldDocument21 paginiThe Life Cycle of Brent FieldMalayan AjumovicÎncă nu există evaluări
- Tugas Bahasa Inggris: ButterflyDocument4 paginiTugas Bahasa Inggris: ButterflyRiyadi TeguhÎncă nu există evaluări
- LUNG ARTIFACTSreviewDocument13 paginiLUNG ARTIFACTSreviewMayra ValderramaÎncă nu există evaluări
- GRADE 302: Element Content (%)Document3 paginiGRADE 302: Element Content (%)Shashank Saxena100% (1)
- Second Language Learning in The Classroom PDFDocument2 paginiSecond Language Learning in The Classroom PDFThanh Phương VõÎncă nu există evaluări
- Pep 2Document54 paginiPep 2vasubandi8Încă nu există evaluări
- Bethelhem Alemayehu LTE Data ServiceDocument104 paginiBethelhem Alemayehu LTE Data Servicemola argawÎncă nu există evaluări
- Benson Ivor - The Zionist FactorDocument234 paginiBenson Ivor - The Zionist Factorblago simeonov100% (1)
- Epson EcoTank ITS Printer L4150 DatasheetDocument2 paginiEpson EcoTank ITS Printer L4150 DatasheetWebAntics.com Online Shopping StoreÎncă nu există evaluări
- Exploring Nurses' Knowledge of The Glasgow Coma Scale in Intensive Care and Emergency Departments at A Tertiary Hospital in Riyadh City, Saudi ArabiaDocument9 paginiExploring Nurses' Knowledge of The Glasgow Coma Scale in Intensive Care and Emergency Departments at A Tertiary Hospital in Riyadh City, Saudi Arabianishu thapaÎncă nu există evaluări
- Rizal Noli Me TangereDocument35 paginiRizal Noli Me TangereKristine Cantilero100% (2)
- Ethernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffDocument25 paginiEthernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffcheckÎncă nu există evaluări