S-ar putea să vă placă și
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsDe la EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsÎncă nu există evaluări
- Basic Iterative Methods For Solving Linear Systems PDFDocument33 paginiBasic Iterative Methods For Solving Linear Systems PDFradoevÎncă nu există evaluări
- Dynamical Systems Method for Solving Nonlinear Operator EquationsDe la EverandDynamical Systems Method for Solving Nonlinear Operator EquationsEvaluare: 5 din 5 stele5/5 (1)
- Differential FormsDocument10 paginiDifferential FormsSamuel PatelÎncă nu există evaluări
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationDe la EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationÎncă nu există evaluări
- Chapter 4 - InterpolationDocument91 paginiChapter 4 - InterpolationAjayÎncă nu există evaluări
- QR Factorization Chapter4Document12 paginiQR Factorization Chapter4Sakıp Mehmet Küçük0% (1)
- InterpolationDocument13 paginiInterpolationEr Aamir MaqboolÎncă nu există evaluări
- Levinson and Durbin AlgorithmDocument4 paginiLevinson and Durbin AlgorithmPrathmesh P SakhadeoÎncă nu există evaluări
- ADC Chapter 1 NotesDocument24 paginiADC Chapter 1 NotesatifÎncă nu există evaluări
- Radial Basis FunctionDocument35 paginiRadial Basis FunctionNicolas De NadaiÎncă nu există evaluări
- Linear Algebra Matrices, Vectors, Determinants. Linear SystemsDocument53 paginiLinear Algebra Matrices, Vectors, Determinants. Linear SystemsHaroldÎncă nu există evaluări
- Information Theory: 1 Random Variables and Probabilities XDocument8 paginiInformation Theory: 1 Random Variables and Probabilities XShashi SumanÎncă nu există evaluări
- Volterra SeriesDocument48 paginiVolterra Seriesnitrosc16703Încă nu există evaluări
- JPEG Compression StandardDocument23 paginiJPEG Compression StandardMitul ModiÎncă nu există evaluări
- Statistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9Document32 paginiStatistical Signal Processing: ECE 5615 Lecture Notes Spring 201 9rizwanÎncă nu există evaluări
- Eikos A Simulation Toolbox For Sensitivity AnalysisDocument57 paginiEikos A Simulation Toolbox For Sensitivity AnalysisOnur Deniz NarinÎncă nu există evaluări
- App.A - Detection and Estimation in Additive Gaussian Noise PDFDocument55 paginiApp.A - Detection and Estimation in Additive Gaussian Noise PDFLê Dương LongÎncă nu există evaluări
- Part1 20180910.13500.1596979305.4946 PDFDocument94 paginiPart1 20180910.13500.1596979305.4946 PDFpattrapong pongpattraÎncă nu există evaluări
- Statistical Signal ProcessingDocument125 paginiStatistical Signal Processingchegu.balaji100% (3)
- A General Approach To Derivative Calculation Using WaveletDocument9 paginiA General Approach To Derivative Calculation Using WaveletDinesh ZanwarÎncă nu există evaluări
- Course Notes Math 146Document10 paginiCourse Notes Math 146user2357Încă nu există evaluări
- ECC - Cyclic Group Cryptography With EllipticDocument21 paginiECC - Cyclic Group Cryptography With EllipticMkumÎncă nu există evaluări
- Solution CH # 5Document39 paginiSolution CH # 5Al FarabiÎncă nu există evaluări
- SC Cat1 Merged PDFDocument244 paginiSC Cat1 Merged PDFEco Frnd Nikhil ChÎncă nu există evaluări
- Sturm's Separation and Comparison TheoremsDocument4 paginiSturm's Separation and Comparison TheoremsLavesh GuptaÎncă nu există evaluări
- Ex4 Tutorial - Forward and Back-PropagationDocument20 paginiEx4 Tutorial - Forward and Back-PropagationAnandÎncă nu există evaluări
- Sequence, Sigma and PiDocument3 paginiSequence, Sigma and PilorenzchÎncă nu există evaluări
- 17 Dynamic Programming Matrix Chain Multiplication No PauseDocument32 pagini17 Dynamic Programming Matrix Chain Multiplication No PauseAbdallahi SidiÎncă nu există evaluări
- Speech Signal ProcessingDocument135 paginiSpeech Signal Processingqwwq215Încă nu există evaluări
- Comments On The Savitzky Golay Convolution Method For Least Squares Fit Smoothing and Differentiation of Digital DataDocument4 paginiComments On The Savitzky Golay Convolution Method For Least Squares Fit Smoothing and Differentiation of Digital DataHéctor F BonillaÎncă nu există evaluări
- Thomas Algorithm Questions and Answers - SanfoundryDocument5 paginiThomas Algorithm Questions and Answers - SanfoundryMohammedBujairÎncă nu există evaluări
- Bessel Function ZeroesDocument5 paginiBessel Function Zeroesputin208Încă nu există evaluări
- Finalv 2Document7 paginiFinalv 2lephucktÎncă nu există evaluări
- 04 Notes 6250 f13Document16 pagini04 Notes 6250 f13uranub27870% (1)
- Weiner FilterDocument35 paginiWeiner FilterSreekanth PagadapalliÎncă nu există evaluări
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 paginiNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemÎncă nu există evaluări
- QueueingDocument50 paginiQueueingJagan RajendiranÎncă nu există evaluări
- The Wavelet Tutorial Part III by Robi PolikarDocument29 paginiThe Wavelet Tutorial Part III by Robi PolikarAbdullah Bin QueyamÎncă nu există evaluări
- FAMDocument8 paginiFAMAnanya ZabinÎncă nu există evaluări
- Mohamad A Mehdi Conformal Mappings and ApplicationsDocument53 paginiMohamad A Mehdi Conformal Mappings and Applicationsapi-363560361Încă nu există evaluări
- Marple AnalyticDocument4 paginiMarple AnalyticsssskkkkllllÎncă nu există evaluări
- Chapter 04c Frequency Filtering (Circulant Matrices) 2Document48 paginiChapter 04c Frequency Filtering (Circulant Matrices) 2Manu PrasadÎncă nu există evaluări
- Wave Equation and Heat Equation-NewDocument12 paginiWave Equation and Heat Equation-NewRabsimranSinghÎncă nu există evaluări
- Mat 771 Functional Analysis Homework 5Document5 paginiMat 771 Functional Analysis Homework 5Yilma ComasÎncă nu există evaluări
- Measures On Metric Spaces and Their Weak ConvergenceDocument17 paginiMeasures On Metric Spaces and Their Weak ConvergencepieropieruÎncă nu există evaluări
- FFT Window Functions - Limits On FFT AnalysisDocument4 paginiFFT Window Functions - Limits On FFT AnalysisA. VillaÎncă nu există evaluări
- Mitra Ch13 3edDocument9 paginiMitra Ch13 3edMohammad Khairul Halim RimonÎncă nu există evaluări
- Different Examples of HDLDocument12 paginiDifferent Examples of HDLHanna Abejo0% (1)
- ANN ProjectDocument38 paginiANN ProjectmaheshkundrapuÎncă nu există evaluări
- Eigenvalue Inequalities For Matrix ProductsDocument4 paginiEigenvalue Inequalities For Matrix ProductsgzipÎncă nu există evaluări
- Waveform Generation MatlabDocument11 paginiWaveform Generation MatlabArmando CajahuaringaÎncă nu există evaluări
- AI-Lecture 12 - Simple PerceptronDocument24 paginiAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- Matlab Tutorial UmichDocument15 paginiMatlab Tutorial UmichNandita AbhyankarÎncă nu există evaluări
- Fourier Series (Signal Processing) NewDocument3 paginiFourier Series (Signal Processing) NewRidaNaeem100% (1)
- Definitions of CEC2017 Benchmark Suite Final Version UpdatedDocument34 paginiDefinitions of CEC2017 Benchmark Suite Final Version Updatedpc100% (1)
- Nyquist-Shannon Sampling TheoremDocument10 paginiNyquist-Shannon Sampling TheoremLucas GallindoÎncă nu există evaluări
- Unit 4: Linear Transformation: V T U T V U T U CT Cu TDocument28 paginiUnit 4: Linear Transformation: V T U T V U T U CT Cu TFITSUM SEIDÎncă nu există evaluări
- Experiment # 01Document9 paginiExperiment # 01M.USMAN BIN AHMEDÎncă nu există evaluări
- Example of Hessenberg ReductionDocument21 paginiExample of Hessenberg ReductionMohammad Umar RehmanÎncă nu există evaluări
- Jisz3107 2008Document13 paginiJisz3107 2008Azhar MahmoodÎncă nu există evaluări
- ZornDocument11 paginiZornAzhar MahmoodÎncă nu există evaluări
- Biegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresDocument11 paginiBiegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresAzhar MahmoodÎncă nu există evaluări
- Nature-Plasmonic Nanoresonators For High-Resolution Colour Fi Ltering and Spectral ImagingDocument5 paginiNature-Plasmonic Nanoresonators For High-Resolution Colour Fi Ltering and Spectral ImagingAzhar MahmoodÎncă nu există evaluări
- Syllabus MSC Math Programme.1 2Document2 paginiSyllabus MSC Math Programme.1 2Azhar MahmoodÎncă nu există evaluări
- Syllabus MSC Math ProgrammeDocument35 paginiSyllabus MSC Math ProgrammeAzhar MahmoodÎncă nu există evaluări
- Sprtheory EnglishDocument33 paginiSprtheory Englishs1hahriarÎncă nu există evaluări
- Chapter3-Imaging With Terahertz WavesDocument48 paginiChapter3-Imaging With Terahertz WavesAzhar MahmoodÎncă nu există evaluări
- Optical PropertiesDocument115 paginiOptical PropertiesRoss JonesÎncă nu există evaluări
- Cgaleriu K P Theory of Semocond Nanostructures (Worcester)Document149 paginiCgaleriu K P Theory of Semocond Nanostructures (Worcester)Игорь ПетровÎncă nu există evaluări
- 3-Simulation of Quantum Transport in Quantum Devices With Spatially Varying Effective MassDocument7 pagini3-Simulation of Quantum Transport in Quantum Devices With Spatially Varying Effective MassAzhar MahmoodÎncă nu există evaluări
- Nphys 287Document7 paginiNphys 287Azhar MahmoodÎncă nu există evaluări
- Vector Diagram Simulation Package: A Matlab Toolbox: Ohio Advanced Epr Laboratory Robert Mccarrick - 1/23/2012Document5 paginiVector Diagram Simulation Package: A Matlab Toolbox: Ohio Advanced Epr Laboratory Robert Mccarrick - 1/23/2012Azhar MahmoodÎncă nu există evaluări
- PDFDocument6 paginiPDFAzhar MahmoodÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- p879 1 PDFDocument4 paginip879 1 PDFAzhar MahmoodÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- E042111 PDFDocument9 paginiE042111 PDFAzhar MahmoodÎncă nu există evaluări
- Chm4m4note PDFDocument25 paginiChm4m4note PDFAzhar MahmoodÎncă nu există evaluări
- Chap 4. Time-dependent Method of Fermi's Golden Rule 2π ¯ h - U - δ (E − E ± ¯hω) Molecular systems: - mi = - i, νi → - ki = - f, ν i · · · - electrons, nucleiiDocument21 paginiChap 4. Time-dependent Method of Fermi's Golden Rule 2π ¯ h - U - δ (E − E ± ¯hω) Molecular systems: - mi = - i, νi → - ki = - f, ν i · · · - electrons, nucleiiAzhar MahmoodÎncă nu există evaluări
- E195304 PDFDocument12 paginiE195304 PDFAzhar MahmoodÎncă nu există evaluări
- PDFDocument17 paginiPDFAzhar MahmoodÎncă nu există evaluări
- E195304 PDFDocument12 paginiE195304 PDFAzhar MahmoodÎncă nu există evaluări
- Thesis Electron-Hole PDFDocument189 paginiThesis Electron-Hole PDFAzhar MahmoodÎncă nu există evaluări
- The Fermifab Toolbox For Fermionic Many-Particle Quantum SystemsDocument17 paginiThe Fermifab Toolbox For Fermionic Many-Particle Quantum SystemsAzhar MahmoodÎncă nu există evaluări
- Thesis-Resonant Tunnelling of Wannier-Stark States PDFDocument157 paginiThesis-Resonant Tunnelling of Wannier-Stark States PDFAzhar MahmoodÎncă nu există evaluări
- No Signaling and Quantum Key Distribution: Week Ending 1 JULY 2005Document4 paginiNo Signaling and Quantum Key Distribution: Week Ending 1 JULY 2005Azhar MahmoodÎncă nu există evaluări
- Density MatrixDocument28 paginiDensity Matrixkunal3902323Încă nu există evaluări
- p1341 1 PDFDocument8 paginip1341 1 PDFAzhar MahmoodÎncă nu există evaluări
- Production and OperationsDocument1 paginăProduction and OperationsrajendrakumarÎncă nu există evaluări
- Nandini Ji QuestionaireDocument4 paginiNandini Ji QuestionaireANKIT SINGHÎncă nu există evaluări
- Brake ABS WabcoDocument2 paginiBrake ABS WabcoBudiÎncă nu există evaluări
- BPR Reengineering Processes-CharacteristicsDocument16 paginiBPR Reengineering Processes-Characteristicsamitrao1983Încă nu există evaluări
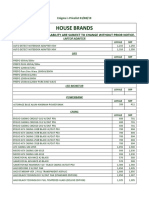
- House Brands: Note: Prices and Availability Are Subject To Change Without Prior NoticeDocument29 paginiHouse Brands: Note: Prices and Availability Are Subject To Change Without Prior NoticeNormzz SapitulaÎncă nu există evaluări
- ME1402 Mechatronics Unit - 3Document71 paginiME1402 Mechatronics Unit - 3Sandheep Radhakrishnan100% (7)
- Compiler Design: Instructor: Mohammed O. Samara UniversityDocument28 paginiCompiler Design: Instructor: Mohammed O. Samara UniversityYitbarek Murche100% (1)
- MQC Classification and MarkingDocument6 paginiMQC Classification and MarkingAirul MutaqinÎncă nu există evaluări
- Level 5 Diploma in Computing Qualification SpecificationDocument49 paginiLevel 5 Diploma in Computing Qualification SpecificationYanesh SoomaryÎncă nu există evaluări
- Offer Letter From HCL PDFDocument2 paginiOffer Letter From HCL PDFsuvodeep burman royÎncă nu există evaluări
- Hierarchical Codebook Design For Fast Search With Grassmannian CodebookDocument5 paginiHierarchical Codebook Design For Fast Search With Grassmannian CodebookThuy Dung NguyenÎncă nu există evaluări
- Unit Rates With FractionsDocument4 paginiUnit Rates With FractionsMr. PetersonÎncă nu există evaluări
- Vmware It Academy Program May2016Document26 paginiVmware It Academy Program May2016someoneÎncă nu există evaluări
- Singh Shashank R.Document3 paginiSingh Shashank R.shashankrsinghÎncă nu există evaluări
- Cel747 Tut 1 & 2 (2014cew2110)Document12 paginiCel747 Tut 1 & 2 (2014cew2110)Suryakant KumarÎncă nu există evaluări
- This Set of Computer Fundamentals Multiple Choice Questions & Answers (MCQS) Focuses On "The Input Unit"Document44 paginiThis Set of Computer Fundamentals Multiple Choice Questions & Answers (MCQS) Focuses On "The Input Unit"Virtual BrainsÎncă nu există evaluări
- Using Adams/View - MD Adams 2010Document1.556 paginiUsing Adams/View - MD Adams 2010pkokatam100% (1)
- Accessing Files and DirectoriesDocument27 paginiAccessing Files and Directoriesraymart_omampoÎncă nu există evaluări
- Project Report On "Online Tour and Travel Agency"Document8 paginiProject Report On "Online Tour and Travel Agency"Hitesh MendirattaÎncă nu există evaluări
- Cloud ComputingDocument1 paginăCloud ComputingMatej KultanÎncă nu există evaluări
- PipeLining in MicroprocessorsDocument19 paginiPipeLining in MicroprocessorsSajid JanjuaÎncă nu există evaluări
- Artificial Neural Network Unsupervised Learning: U.S. Congress SynapseDocument2 paginiArtificial Neural Network Unsupervised Learning: U.S. Congress SynapseSonali KushwahÎncă nu există evaluări
- Number System-1Document29 paginiNumber System-1SATISH GADHAVEÎncă nu există evaluări
- Bank North Flashback Case StudyDocument4 paginiBank North Flashback Case StudyAmrhar B.Încă nu există evaluări
- Object-Oriented Programming (Oop) With C++Document13 paginiObject-Oriented Programming (Oop) With C++Sahil AliÎncă nu există evaluări
- 4 2 2Document403 pagini4 2 2joÎncă nu există evaluări
- MonitoringDocument8 paginiMonitoringsid_srmsÎncă nu există evaluări
- FILE ORGANIZATION - Single LevelDocument7 paginiFILE ORGANIZATION - Single LevelArjun PrakashÎncă nu există evaluări
- Python ReportDocument20 paginiPython Reportadarsh100% (1)
- Sap HCM Organizational Management User GuideDocument51 paginiSap HCM Organizational Management User GuideRajesh ChowdaryÎncă nu există evaluări