S-ar putea să vă placă și
- Pro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsDocument6 paginiPro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsCADTDDÎncă nu există evaluări
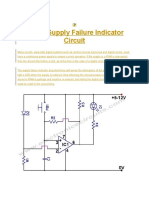
- Power Supply Failure Indicator CircuitDocument3 paginiPower Supply Failure Indicator CircuitRaja VenkateshÎncă nu există evaluări
- Holesaw Drills and Kits, Square Hole Drilling Sets: Holesaw Accessories, Pilot Drill Holesaw DrillDocument1 paginăHolesaw Drills and Kits, Square Hole Drilling Sets: Holesaw Accessories, Pilot Drill Holesaw DrillRaja VenkateshÎncă nu există evaluări
- Page 2Document1 paginăPage 2Raja VenkateshÎncă nu există evaluări
- Automatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemDocument0 paginiAutomatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemanilfkÎncă nu există evaluări
- Calculations Velocity at The Shell: Velocity at The TubeDocument1 paginăCalculations Velocity at The Shell: Velocity at The TubeRaja VenkateshÎncă nu există evaluări
- Automatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemDocument0 paginiAutomatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemanilfkÎncă nu există evaluări
- Automatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemDocument0 paginiAutomatic Vehicle Accident Detection and Messaging System Using GSM and Gps ModemanilfkÎncă nu există evaluări
- Pro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsDocument6 paginiPro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsCADTDDÎncă nu există evaluări
- 6N13 IJESET0603127 v6 Iss3 324 334Document11 pagini6N13 IJESET0603127 v6 Iss3 324 334Raja VenkateshÎncă nu există evaluări
- 2006 CF 397888333Document26 pagini2006 CF 397888333Raja VenkateshÎncă nu există evaluări
- It Was An Uphill Battle For Many Teams in The First Annual Chainless ChallengeDocument3 paginiIt Was An Uphill Battle For Many Teams in The First Annual Chainless ChallengeRaja VenkateshÎncă nu există evaluări
- Advanced Manufacturing Process 9094Document5 paginiAdvanced Manufacturing Process 9094Raja VenkateshÎncă nu există evaluări
- 40 FireDocument4 pagini40 FireLufrejuÎncă nu există evaluări
- Portable Hydraulic Riveting MachineDocument2 paginiPortable Hydraulic Riveting MachineRaja VenkateshÎncă nu există evaluări
- Advanced Manufacturing Process 9094Document5 paginiAdvanced Manufacturing Process 9094Raja VenkateshÎncă nu există evaluări
- Pro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsDocument6 paginiPro/ENGINEER Wildfire 3.0 Tips: Keyboard/mouse ShortcutsCADTDDÎncă nu există evaluări
- Dynamic of Railway BridgesDocument26 paginiDynamic of Railway BridgesRaja Venkatesh100% (1)
- Automatic HeadlightDocument20 paginiAutomatic HeadlightN C Abhijith100% (7)
- wj0708 187Document8 paginiwj0708 187Raja VenkateshÎncă nu există evaluări
- Sbi Specialist Cadre Officers AdDocument4 paginiSbi Specialist Cadre Officers AdsohamgÎncă nu există evaluări
- 4978 Energy Efficiency ASEE 3-18-2012FxDocument11 pagini4978 Energy Efficiency ASEE 3-18-2012FxRaja VenkateshÎncă nu există evaluări
- Crank and Slotted Lever Quick Return (Rev2)Document9 paginiCrank and Slotted Lever Quick Return (Rev2)Vipin YadavÎncă nu există evaluări
- E-Bicycle Battery SpecificationDocument3 paginiE-Bicycle Battery SpecificationRaja VenkateshÎncă nu există evaluări
- AbstractDocument1 paginăAbstractRaja VenkateshÎncă nu există evaluări
- Solar Automatic Mobile Charger With Pay System AbstractDocument3 paginiSolar Automatic Mobile Charger With Pay System AbstractRaja VenkateshÎncă nu există evaluări
- Selection of Materials For High Temperature Duties in BoilerDocument2 paginiSelection of Materials For High Temperature Duties in BoilerRaja VenkateshÎncă nu există evaluări
- Mix Design For Quary Sand ConcreteDocument9 paginiMix Design For Quary Sand ConcreteRaja VenkateshÎncă nu există evaluări
- Construction of Auditorium BuildingDocument3 paginiConstruction of Auditorium BuildingRaja VenkateshÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Apply File Io Operation in JavaDocument18 paginiApply File Io Operation in JavaEdwin LapatÎncă nu există evaluări
- Google File System (GFS)Document18 paginiGoogle File System (GFS)Mohit GautamÎncă nu există evaluări
- IV Pump Flo-Gard 6301Document48 paginiIV Pump Flo-Gard 6301Dba BiomedtechÎncă nu există evaluări
- Birlasoft Resume SampleDocument3 paginiBirlasoft Resume SamplePrince Kumar ChaudharyÎncă nu există evaluări
- Spatial Reciprocity of Uplink and Downlink Radio Channels in FDD SystemsDocument7 paginiSpatial Reciprocity of Uplink and Downlink Radio Channels in FDD SystemscksmerÎncă nu există evaluări
- Engineering Report Writing Using Word 2010: University of WaterlooDocument75 paginiEngineering Report Writing Using Word 2010: University of WaterlooRIANNE JUSTIN POLICARPIOÎncă nu există evaluări
- SO Snippet ENASEDocument10 paginiSO Snippet ENASEamanswaraj007Încă nu există evaluări
- ROWE Scan 600 Manual PDFDocument157 paginiROWE Scan 600 Manual PDFMārtiņš DreijersÎncă nu există evaluări
- Keithly 2002 ManualDocument361 paginiKeithly 2002 ManualSteve KirkmanÎncă nu există evaluări
- S&H Office Interior DrawingsDocument14 paginiS&H Office Interior Drawingssri vidhya AmbikaÎncă nu există evaluări
- Katalog QuantumDocument9 paginiKatalog QuantumBrian Bagus AriantoÎncă nu există evaluări
- MS Word FundamentalsDocument49 paginiMS Word Fundamentalsladsjovero6162100% (1)
- Ministry of Communications & Informatics: Libyan National Frequency Plan (LNFP)Document255 paginiMinistry of Communications & Informatics: Libyan National Frequency Plan (LNFP)Ali AbushhiwaÎncă nu există evaluări
- Negative Feedback - Operational AmplifiersDocument3 paginiNegative Feedback - Operational AmplifiersShailaja UdtewarÎncă nu există evaluări
- Inventor 2012 New APIDocument26 paginiInventor 2012 New APIguernikaÎncă nu există evaluări
- Hafele Dialock BrochureDocument17 paginiHafele Dialock BrochureHùng Trần XuânÎncă nu există evaluări
- CH 06Document106 paginiCH 06Ray Vega LugoÎncă nu există evaluări
- JsonDocument10 paginiJsonAJAY SREEDHAR J100% (1)
- IT Roadmap For GRC SKDocument1 paginăIT Roadmap For GRC SKaakashÎncă nu există evaluări
- Trees: Discrete Structures For ComputingDocument48 paginiTrees: Discrete Structures For ComputingLê Văn HoàngÎncă nu există evaluări
- RDBMS Lab Cycle 2Document3 paginiRDBMS Lab Cycle 2Harsha VardhanÎncă nu există evaluări
- P780Document50 paginiP780Shailesh BhanushaliÎncă nu există evaluări
- Osama Quantum ComputingDocument49 paginiOsama Quantum ComputingErvin HodzicÎncă nu există evaluări
- Demandware Load Test Plan - TemplateDocument4 paginiDemandware Load Test Plan - TemplateAshok JagtapÎncă nu există evaluări
- Wansview IP Camera ManualDocument54 paginiWansview IP Camera ManualMaria Jose PareaÎncă nu există evaluări
- Customization Manual BV Fam R2.3 (Software Release 2.5.1)Document51 paginiCustomization Manual BV Fam R2.3 (Software Release 2.5.1)Bassam GhaziÎncă nu există evaluări
- Software Requirements SpecificationDocument13 paginiSoftware Requirements SpecificationJilesh MehtaÎncă nu există evaluări
- Expert Systems Principles and Programming, Fourth EditionDocument35 paginiExpert Systems Principles and Programming, Fourth EditionJohn Edokawabata100% (3)
- François Roche - R&Sie (N) ArchitectsDocument14 paginiFrançois Roche - R&Sie (N) ArchitectsEmersonAagaardÎncă nu există evaluări
- Composite and Inverse FunDocument14 paginiComposite and Inverse FunNiejay Arcullo LlagasÎncă nu există evaluări