Documente Academic
Documente Profesional
Documente Cultură
AAAAAAAcours rdm1-12-02-2010-1
Încărcat de
Goud VraiDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
AAAAAAAcours rdm1-12-02-2010-1
Încărcat de
Goud VraiDrepturi de autor:
Formate disponibile
ENIM Rsistance des matriaux 1 ( Pr B.
NAJJI )
1
Ecole Nationale de lIndustrie Minrale
NOTES DE COURS
RESISTANCE DES MATERIAUX I
ENIM Professeur B. NAJJI
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
2
CHAPITRE 1
GENERALITES ET INTRODUCTION A LA
RESISTANCE DES MATERIAUX
I - INTRODUCTION
La rsistance des matriaux (R.D.M.) va nous permettre d'aborder la mcanique
des solides dformables, suite naturelle de la mcanique du solide suppos
indformable lorsque nous tudions la statique, la cinmatique, et la dynamique.
Contrairement la mcanique rationnelle, la RDM tudie le comportement des
corps solides dformables. D'autre part les lois du mouvement passent au second plan.
La mcanique des corps solides dformables comprend aussi la thorie de
l'lasticit qui examine les mmes questions que la RDM.
La thorie de l'lasticit tudie le comportement des corps dformables d'un point
de vue plus rigoureux, faisant appel un outil mathmatique plus complexe. La RDM
se propose de crer des mthodes de calcul simples pour les lments de construction
les plus typiques.
II - OBJET DE LA RDM :
Tout corps se dforme lorsqu'il est sollicit par des efforts. L'amplitude de la
dformation crot avec l'intensit des efforts et peut conduire la rupture. la RDM
envisage ces dformations et tudie le comportement du matriau. les problmes
pouvant tre rsolus par la RDM sont :
a) Le dimensionnement : connaissant les caractristiques du matriau et le
torseur des forces extrieures, le calcul dtermine les dimensions de la pice.
b) L'tude de la stabilit : le plus souvent, les critres technologiques,
esthtiques et conomiques imposent les formes et les dimensions de l'lment. La
RDM permet d'tudier les dformations et de vrifier la stabilit de l'ensemble
raliser.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
3
III - MODELISATION :
Le choix du schma de calcul en RDM passe par la modlisation des proprits et
caractristiques mcaniques du matriau, de la forme du corps solide et des charges
appliques.
III.1 - Modlisation des proprits du matriau :
Ces proprits sont :
a) Homognit : Les dimensions des corps tudis, nettement trs suprieures
celles des cristaux, permettent de considrer les matriaux parfaitement homognes.
C'est--dire qu'en tout point du corps solide, le matriau possde la mme constitution
et la mme structure. De la notion d'homognit dcoule celle du milieu continu.
b) Isotropie : Un matriau est isotrope lorsque ses proprits mcaniques ne
dpendent pas de l'orientation choisie. les matriaux utiliss en construction mcanique
sont, en gnral, isotropes. Exemple de matriau non isotrope : le bois.
c) L'lasticit : C'est la proprit qu'ont les corps de reprendre leurs formes
initiales lorsque les charges qui ont caus leurs dformations cessent d'tre appliques.
Lorsque les charges deviennent trs importantes les matriaux ne sont plus lastiques et
pour tudier de tels corps il faudra faire appel la thorie de la plasticit.
III.2 - Schmatisation de la forme des solides tudis :
En RDM, on introduit des simplifications dans la gomtrie de la construction
mcanique en rduisant les solides tudis en deux catgories :
a) La poutre ou barre :
Une poutre est un solide engendr par le dplacement d'une surface plane S dont
le centre de gravit G dcrit une ligne L
m
perpendiculaire en tout point au plan
contenant S. L
m
est appele ligne moyenne. Elle peut tre droite (poutre droite) ou
courbe (poutre courbe). Le rayon de courbure de L
m
est toujours grand par rapport aux
dimensions transversales; ces dernires ne varient que d'une faon continue en fonction
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
4
du dplacement de S. Ces dimensions transversales sont petites par rapport la
dimension principale de la poutre. Gnralement, on admet un rayon de courbure
suprieur cinq fois la plus grande dimension transversale elle-mme infrieure au tiers
de la longueur de la poutre.
Figure 1.1 : Dfinition de la poutre
b) L'enveloppe :
Une des dimensions est bien plus petite que les deux autres. On dfinit une
surface moyenne qui est le lieu gomtrique des points quidistants des deux surfaces
de l'enveloppe.
Figure 1.2 : Dfinition de l'enveloppe
III.3 - Schmatisation du torseur des forces de cohsion :
Le calcul des lments de rduction du torseur des forces de cohsion (forces
internes) se fait en deux temps :
L
m
G
S
e
a
b
L
1
L
2
e
S
m
S
m
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
5
a) Dtermination du torseur des forces extrieures :
Le calcul des actions aux appuis se fait en quilibrant l'ensemble du solide tudi.
les dformations sont trs faibles et les calculs se font sur le solide non dform
b) Dtermination du torseur des forces de cohsion :
Considrons un plan (P) qui coupe la poutre en deux parties suivant une section
droite (S). On dfinit au centre de gravit (G) de la section (S) un tridre orthonorm
direct ( G, x, y, z). l'axe (Gx) orient vers l'extrieur de la matire de la partie 1, est
tangent la ligne moyenne en G (Figure 1.3)
Figure 1.3 : Forces de cohsion
L'quilibre de la partie 1 s'crit :
[ ]
T
Fe/1
G
+ [T
Fi/1
]
G
= [0] avec [T
Fi/1
]
G
+
[T
Fi/2
]
G
= 0
( Principe de l'action et de la raction)
qui peut encore s'crire
T
Fi / 2
(
G
= T
Fe / 1
(
G
Les forces de cohsion de la partie 2 sur la partie 1 sont opposes aux forces de
cohsion de la partie 1 sur la partie 2 ( principe de l'action et de la raction).
F
e
F
e
F
e
S
fi
M
G
(fi)
G 1
Y
Z
X
P
2
F
e
F
e
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
6
Au centre de gravit (G), les lments de rduction du torseur des forces de
cohsion sont:
- Un vecteur somme S
Fi/2
des forces de cohsion de la partie 1 sur la partie 2.
La projection de S
Fi/2
sur l'axe (Gx) est appel effort normal N.
La projection de S
Fi/2
sur le plan ( G,y,z) est appel effort tranchant T
- Un pointeur moment en G : M
G
(
Fi/2)
La projection de M
G
(
Fi/2)
sur l'axe (GX) est appel moment longitudinal
M
x
ou encore, moment de torsion si la poutre est symtrique par rapport l'axe (Gx)
Les projections de M
G
(Fi/2) sur les axes (Gy) et (Gz) sont appels
moments de flexion M
y
et M
z
.
Figure 1.4 Elments de rduction
IV - HYPOTHESES FONDAMENTALES DE LA THEORIE DES
POUTRES :
A fin de simplifier les calculs, la thorie de la RDM utilise des hypothses
dduites de l'exprimentation et qui se vrifient pratiquement pour toutes les
sollicitations.
a) Le matriau :
Il est suppos homogne, isotrope et lastique
Y
X
Z
M
x
M
y
M
z
N
T
y
T
z
S
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
7
b) La gomtrie :
Les rsultats obtenus l'aide de la R.D.M. sont dautant plus exacts que :
- le rayon de courbure de la fibre moyenne est trs grand vis vis de la
hauteur de la poutre (R
c
> 5 fois h)
- la longueur de la poutre est trs grande devant les autres dimensions
(L> 3 fois la plus grande dimension transversale).
- les ventuelles variations de la section (S) sont faibles et progressives.
c) Hypothse de Barr -saint venant
L'hypothse de la rpartition uniforme des forces de cohsion n'est valable que si
l'on fait abstraction des particularits suivantes :
- zones d'application des charges
- zone de variations brusques des sections
L'hypothse de saint venant consiste supposer que la rpartition des forces
internes est bien uniforme, des distances de ces zones particulires suprieures aux
dimensions de la section.
d) Hypothse de Navier-Bernouilli
Les sections planes normales la fibre moyenne avant dformation restent planes
et normales cette fibre aprs dformation.
V - PRINCIPES FONDAMENTAUX
a) Principe de la coupe :
La rpartition des forces internes dans une section de poutre ne dpend que de la
rsultante des forces et des moments extrieurs appliqus gauche de cette section.
b) Principe de superposition :
Les dplacements et les forces internes en un point d'un corps soumis plusieurs
forces extrieures imposes sont respectivement la somme gomtrique des
dplacements et des forces internes produites au mme point par chaque force externe
prise sparment.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
8
VI - MILIEU CONTINU-NOTION DE CONTRAINTE :
Un matriau est constitu d'atomes rpartis suivant un rseau cristallin. les forces
interatomiques maintiennent les atomes aux noeuds du rseau. Ces phnomnes
provoquent la cohsion des particules de matire et permettent au solide de rsister aux
effets des efforts extrieurs. Chaque particule est soumise aux forces de cohsion f
i
. Si
le matriau est homogne et isotrope, ces forces internes sont indpendantes de la
position de la particule au sein du milieu continu. L'quilibre de l'lment ralis
l'aide des principes de la statique ne met pas en vidence ces forces internes. Seule une
coupe de l'lment fait apparatre ces forces ( Figure 1.5)
Figure 1.5
L'quilibre de l'une des parties de llment donne la valeur de ces forces de
cohsion, par exemple l'quilibre de la partie 1 :
Figure 1.6
P
1
2
M
S
F
e
F
e
F
e
Fe
F
i/1
1
F
e
F
e
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
9
Cette partie est sollicite par les forces extrieures f
e
et par les forces internes f
i
appliques toutes les particules de la surface. La condition ncessaire et suffisante
pour que la partie (1) soit en quilibre est que la somme du torseur [T
fe/1
] des forces
extrieures et du torseur [Tf
i/1
] des forces de cohsion soit nulle en un point. Soit en un
point M, un lment de surface S appartenant la section S.
Le rapport
F
S
i
reprsente la force de cohsion en M par unit de surface. En
vertu de la continuit du milieu, ce rapport tend vers une limite C lorsque S tend vers
zro. Cette limite est appele contrainte au point M, note (M,C).
En projetant le pointeur (M,C) sur :
- la normale S, nous obtenons la contrainte (M,) appele contrainte normale
- le plan de S, nous obtenons la contrainte (M, ), appele contrainte
tangentielle ou cission.
* Unit de contrainte :
L'unit SI de mesure des contraintes est le Pascal, not Pa
1 Pa = 1N/m
2
Cette unit est petite, nous utiliserons son multiple le mgapascal not Mpa :
1 Mpa = 10
6
Pa = 1 N/mm
2
S
S
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
10
CHAPITRE 2 :
RAPPELS SUR LA STATIQUE
I - INTRODUCTION:
La R.d.M., comme nous lavons voqu au chapitre prcdent, permet dtudier
le comportement des solides dformables. Les dformations sont tellement petites
quelles nont pas dinfluence significative sur lquilibre du solide tudi. Donc, le
calcul des ractions aux liaisons se fera avec les quations de la statique classique, en
supposant que le solide est indformable.
II DEGRES DE LIBERTE DUN SOLIDE :
II-I Cas de la statique plane :
Soit un solide (S), astreint rester dans le plan (O,X,Y) et soit un point M(X
1
,Y
1
)
appartenant au solide (S).
Nous pouvons crire :
OM = X
1
.i + Y
1
.j
X
1
===== X
1
+X
1
2 dplacements (u,v).
Y
1
===== Y
1
+ Y
1
Le solide (S) peut encore tourner autour de laxe MZ dun angle par exemple,
tout en restant dans le plan (O,X,Y). Pour dcrire dans le plan, la position de ce
solide, il faut donc prciser les valeurs de trois paramtres (u,v,). Le solide
possde trois degrs de libert dans le plan.
II-2 Cas de la statique spatiale :
Soit un solide (S) dcrit dans un repre fixe (O,X,Y,Z). En considrant un
point M (X
1
,Y
1
,Z
1
) appartenant au solide (S), nous pouvons crire :
M
O
X
Y
X
1
Y
1
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
11
OM = X
1
.i + Y
1
.j + Z
1
.k
X
1
X
1
+ X
1
Y
1
Y
1
+ Y
1
3 dplacements
Z
1
Z
1
+ Z
1
Le solide (S) peut galement tourner autour des 3 axes :
Axe MX Rotation dun angle
Axe MY Rotation dun angle
Axe MZ Rotation dun angle
La position du solide (S) dans lespace dpend donc de six paramtres. On dit
que le solide possde six degrs de libert.
III - LIAISONS MECANIQUES :
Les liaisons mcaniques permettent de supprimer un ou plusieurs degrs
de libert dun corps solide. On distingue :
- Les liaisons parfaites sans frottement.
- Les liaisons avec frottements.
Dans le cadre de ce cours, nous supposerons que toutes les liaisons
mcaniques sont parfaites.
III-1 Liaisons mcaniques parfaites dans le plan :
a) Appui simple :
Les corps (S
1
) et (S
2
) ne sont en contact que par un point.
X
Y
O
S
1
S
2
M
X
Y
Z
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
12
Le torseur associ cette liaison mcanique scrit :
Le schma utilis pour cette liaison mcanique est donn ci-aprs :
Une liaison mcanique de type appui simple supprime un seul degr de
libert ( une translation).
b) Appui linaire :
Les corps (S
1
) et (S
2
) sont en contact par un segment de droite.
Le torseur des forces associ cette liaison mcanique scrit:
Ou bien
X
Y
R
y
X
Y
X
T
Fe 2/1
O
0
S
2/1
= R
y
0
0
M
2/1(O)
= 0
0
S
1
S
2
O
Y
T
Fe 2/1
O
0
S
2/1
= R
y
0
0
M
2/1(O)
= 0
N
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
13
Le schma associ cette liaison mcanique est le suivant:
La liaison de type appui linaire supprime deux degrs de libert ( une
translation et une rotation).
c) Rotule cylindrique:
Le corps (S
1
) peut tourner librement autour de laxe (S
2
) fixe
qui est perpendiculaire au plan XOY.
Le torseur des forces associ cette liaison mcanique scrit:
La schmatisation de cette liaison est reprsente ci-dessous:
X
Y R
Y
N
S
1
S
2
R
x
R
Y
X
Y
T
Fe 2/1
O
R
x
S
2/1
= R
y
0
0
M
2/1(O)
= 0
0
R
X
R
Y
X
Y
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
14
Une liaison mcanique de type rotule cylindrique supprime deux degrs
de libert (deux translations).
d) Encastrement:
Le corps solide (S
1
) na aucune possibilit de dplacement
par rapport au solide (S
2
).
Le torseur des forces extrieures associ cette liaison scrit :
La schmatisation de lencastrement est reprsente ci-dessous :
Une liaison mcanique de type encastrement supprime trois degrs de libert
(deux translations et une rotation).
X
Y
R
X
R
y
N
O S
2
T
Fe 2/1
O
R
x
S
2/1
= R
y
0
0
M
2/1(O)
= 0
N
X
Y
R
X
R
Y
N
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
15
III-2 Liaisons mcaniques parfaites dans lespace :
a) Appui simple.
Les deux corps solides (S
1
) et (S
2
) sont tangents en un point.
Le torseur des forces associ ce type de liaison scrit :
Lappui simple supprime donc, un seul degr de libert (une translation).
b) Appui plan :
Les deux corps solides (S
1
) et (S
2
) ont en commun une portion de
plan.
O
S
2
S
1
X
Z
Y
T
Fe 2/1
O
0
S
2/1
= R
y
0
0
M
2/1(O)
= 0
0
X
Y
Z
O S
1
S
2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
16
Le torseur de forces associ cette liaison mcanique scrit :
Lappui plan supprime trois degrs de libert (une translation et deux
rotations).
c) Rotule sphrique :
Les deux corps solides (S
1
) et (S
2
) ont en commun une sphre
de centre O. Le solide (S
1
) ne peut avoir aucun mouvement de translation
par rapport au solide (S
2
).
Le torseur de forces associ cette liaison mcanique scrit :
La liaison mcanique de type liaison sphrique supprime trois degrs de
libert (trois translations).
T
Fe 2/1
O
0
S
2/1
= R
y
0
L
M
2/1(O)
= 0
N
X
Y
Z
S
2
S
1
O
T
Fe 2/1
O
R
x
S
2/1
= R
y
R
z
0
M
2/1(O)
= 0
0
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
17
d) Encastrement :
Aucun mouvement nest possible entre les deux solides (S
1
) et (S
2
).
Le torseur de forces associ cette liaison mcanique scrit :
Lencastrement dans lespace peut se schmatiser ainsi :
Lencastrement supprime six degrs de libert dans lespace (trois
translations et trois rotations).
X
Y
Z
S
2
S
1
O
T
Fe 2/1
O
R
x
S
2/1
= R
y
R
z
L
M
2/1(O)
= M
N
L
M
N
X
Y
Z
R
x
R
y
R
z
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
18
IV PRINCIPES DE LA STATIQUE :
a) Principe de laction et de la raction :
Laction dun corps solide (S
1
) sur un corps solide (S
2
) est oppose
laction de (S
2
) sur (S
1
).
b) Equilibre dun corps solide:
Un solide est en quilibre si son tat de mouvement ou de repos ne
varie pas.
Le corps solide est en quilibre sous laction dun certain nombre
defforts qui peuvent tre classs en deux familles :
- Efforts appliqus connus.
- Efforts de raction aux liaisons du solide avec son milieu extrieur. Ces
derniers efforts sont gnralement inconnus. On exprime alors lquilibre
statique du solide pour pouvoir les dterminer.
Lquilibre statique du corps solide sexprime par :
F = 0
Mt/o = 0
Exemple 1 : Equilibre dans le plan OXY :
Proj/ox = 0 (1)
Proj/oy = 0 (2)
Mt/oz = 0 (3)
3 quations expriment lquilibre dans le plan.
Exemple 2 : Equilibre dans lespace OXYZ
Proj/ox = 0 (1)
Proj/oy = 0 (2)
Proj/oz = 0 (3)
Mt/ox = 0 (4)
Mt/oy = 0 (5)
Mt/oz = 0 (6)
6 quations expriment lquilibre dans lespace.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
19
CHAPITRE 3 :
CARACTERISTIQUES MECANIQUES DES
MATERIAUX
I - ESSAIS DE TRACTION ET DE COMPRESSION :
I.1 - Ncessit des essais :
Pour l'tude pratique de la rsistance et de la dformation des pices, des essais
sont ncessaires en vue de dterminer certaines caractristiques. par exemple le module
de Young E. Les plus importants de ces essais sont ceux de traction et de compression,
car ils permettent de dterminer un grand nombre de caractristiques de la manire la
plus simple.
Mais il existe un grand nombre d'essai. par exemple : essai de duret, de rsilience, de
fatigue...etc.
I.2 - prouvettes :
a) prouvette de Traction :
C'est une prouvette usine, gnralement cylindrique (Figure 2.1); Deux repres
A et B matrialisent la longueur utile de l'prouvette (L
O
). La section de l'prouvette
So obit la relation suivante :
L
0
= K So (L
o
en mm et S
o
en mm
2
)
La valeur de K est diffrente pour chaque matriau, par exemple : K = 5,65 pour
les aciers, K = 3 pour les fontes mallables.
Figure 3.1 : prouvette de traction
L
0
L
c
S
0
A B
d
Tte damarrage
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
20
b) prouvette de compression:
Ce sont des cylindres dont la hauteur est gale 2 ou 3 fois le diamtre car :
- si les prouvettes sont trop longues, il y a risque de flambage
- si elles sont trop courtes, le diamtre ne peut pas augmenter cause du
frottement sur les surfaces d'appui.
Figure 3.2 : Essai de compression
I.3 - Machines d'essai :
Il existe de petites machines commande mcanique, mais on utilise surtout des
machines commande hydraulique.
Ces machines permettent de tracer un diagramme reprsentant la force applique
en fonction de l'allongement de l'prouvette. On mesure l'allongement de l'prouvette
l'aide d'un extensomtre, ou bien l'on mesure les dplacements relatifs des mandrins de
serrage.
L
0
F
1
F
2
L
1
L
2
Rupture de
matriaux fragiles
Rupture de
matriaux ductile
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
21
Figure 3.3 : Machine d'essai
I.4 - Diagramme de traction d'une prouvette en acier doux:
Considrons le diagramme obtenu lors de l'essai de traction d'une "prouvette en
acier doux (Figure 2.4). Cette courbe "allongement-effort" est compose d'une partie
linaire OA et d'une partie de ligne courbe AB.
Figure 3.4 : Diagramme de traction
a) Le domaine lastique :
Il correspond la partie linaire OA. Cette droite montre que l'allongement l
est faible et que cette dformation est proportionnelle l'effort |F | exerc sur
l'prouvette.
AL = L-L0
H
A
F
e
F
r
F
S
B
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
22
La limite lastique est dfinie comme tant le rapport de la charge | F
e
| par l'aire
de la section S
o
de la partie utile :
e
=
Si au cours de l'essai et avant d'atteindre la limite d'lasticit l'effort est supprim,
l'prouvette reprend sa longueur initiale. Le matriau est donc lastique.
L'allongement relatif est dfini par :
=
L
L0
=
L L
L
0
0
Pour des dformations lastiques, les dimensions de la section droite ne varient
pratiquement pas. En tous les points de cette section apparaissent des contraintes
normales uniformment rparties qui vrifient la relation :
S
F
=
La forme de la courbe " contrainte ()- allongement relatif ()" est donc
identique, celle enregistre sur la machine de traction :
Figure 3.5 : Courbe = F( )
La loi de proportionnalit entre la contrainte et l'allongement relatif est appel loi
de Hooke. Elle s'crit :
= E.
B S
H
A
| F |
So
e
e
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
23
E : module d'lasticit longitudinale ou encore module de Young. unit : N/mm
2
, MPa, N/m
2
Ce module est une constante pour le matriau (voir tableau des caractristiques
mcaniques des matriaux).
b) Le domaine des dformations permanentes :
Au-del de la limite lastique, la suppression de l'effort F n'entrane plus une
disparition totale de la dformation. L'amplitude de la dformation rmanente est
dtermine sur le diagramme en menant du point de la courbe correspondant l'effort F
une parallle la droite AO.
Figure 3.6 : Domaine non lastique
II - CARACTERISTIQUES MECANIQUES DES MATERIAUX:
II.1 - Caractristiques dcoulant de l'essai de traction (NF A 03151)
a) Contrainte de rupture
C'est le rapport entre la force de rupture et la section initiale :
r
=
|F
r
|
So
B
S
F
F
r
F
e
Dformation rmanente
L
A
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
24
b) Limite lastique :
C'est le rapport entre la charge de fin de zone lastique et la section initiale :
e
=
F
S
e
0
Pour les matriaux dont la fin de zone lastique est difficilement apparente, on
dfinit une limite d'lasticit conventionnelle telle que l'allongement rsiduel soit gal
0.2 % de la longueur initiale.
c) Module de Young :
Il est donn par la pente du diagramme ( Fig 3.7) dans la zone lastique ( zone
OA)
Figure 3.7: Module de Young
d) Coefficient d'allongement
A % = 100
0
L
L
B S
H
A
e
O
E = tg
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
25
II.2 - Caractristiques dcoulant d'autres essais:
a) Essais de duret :
Il existe plusieurs types d'essais bass sur la rsistance la pntration statique
du corps tudier par un autre corps.
- Essai Brinell ( NF A 03152):
On ralise une empreinte sur le matriau tester l'aide d'un bille en acier ultra
dur.
Les essais se diffrencient par le
diamtre de la bille utilise :
F/D
2
= 3 00 N/mm
2
La duret Brinell est dfinie par :
HB =
F
S
avec S =
D
2
( D - D - d )
2 2
HB est exprim en point Brinell = 1 N/mm
2
- Essai Rockwell ( NF A 03153):
Le pntrateur est un cne en diamant. Le cne est plac sur la surface du
matriau tester, avec une charge initiale de 9,8 daN. on mesure l'accroissement
rmanent de pntration B sous la charge initiale, aprs suppression de la surcharge :
HRC) (unit
0.002
e
- 100 = HEC
F
D
d
Matriau essay
120
R 0.2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
26
- Essai Vickers ( NF A 03154):
Le pnetrateur est une pyramide en diamant base carr. L'angle entre les
deux faces opposes est de 136 . la duret Vickers est dfinie par :
Il n'existe aucune relation gnrale entre la duret et
e
.
b) Essai de rsilience (NFA 03156):
Un matriau est dit ductile lorsque il passe par un comportement plastique avant
d'atteindre la rupture. pour une rupture par cohsion sans ( ou presque) dformation
plastique, le matriau est alors dit fragile. Le verre caractrise bien ce type de
comportement. le degr de fragilit d'un matriau est mesur par l'essai de rsilience
(Figure 3.8) . la force de percussion ncessaire au choc est cre par le mouton-pendule.
Figure 3.8 : Mouton de charpy
La rsilience (ou rsistance au choc) d'un matriau est caractrise par l'nergie
absorbe lors de la rupture ramene l'unit d'aire de la section entaille:
K =
mg( h - h )
S
1 2
(en daJ/cm
2
) S : Section entaille
c) Essai de fatigue :
Les organes soumis des efforts variables et rpts se rompent sans que la
contrainte en chaque point du matriau ait dpass la limite lastique.
d
1
d
2
h
1
h
2
Mg
Eprouvette
2
854 . 1
d
F
Hv =
2
2 1
d d
d
+
=
(en N/mm
2
)
Avec
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
27
La limite de fatigue correspond l'amplitude maximale de l'effort priodique qui peut
tre appliqu indfiniment sans provoquer la rupture; elle est note
D
. La valeur de
cette limite varie avec la nature de la sollicitation.
Les sollicitations priodiques courantes sont :
- la traction/ compression
- la flexion alterne
- la flexion rotative
L'essai en flexion rotative est le plus utilis.
Le rsultat de l'essai de fatigue est gnralement exprim par le trac de la courbe
de Whler. Elle donne le nombre de cycles ncessaires la rupture en fonction de la
contrainte et admet une asymptote horizontale qui correspond la limite de fatigue (
Figure 3.9):
Figure 3.9 : Courbe de Whler en flexion rotative
10
2
10
4
10
6
10
8
10
10
10
12
10
14
10
16
Nbre de cycles
Contrainte
alterne
20
60
100
D
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
28
III - EXEMPLES DE CARACTERISTIQUES MECANIQUES
Matriau
e
t
daN
/mm
2
rt
daN
/mm
2
e c
daN
/mm
2
A %
E
10
5
daN
/mm
2
D
daN
/mm
2
Acier doux A 32 24 32 24 35 2 20
Acier mi-dur C45 40 75 40 16 2,1 30
Acier dur C65 50 90 50 7 2,1 33
Acier C65 tremp 75 100 75 6 2,1 42
Acier alli tr.rev.
35CN11
145 170 150 9 2,1 42
Fonte grise 14 15 31 0,6 0,7 --
Cuivre recuit 5,5 22 5,5 46 1,1 --
Laiton 33 45 33 17 1,2 --
Bronze 11 14 11 7,5 1,2 --
Duralumin 34 54 34 13 0,75 13
IV - COEFFICIENT DE SECURITE :
Le critre de ruine d'une construction n'est pas, en gnral, la rupture mais
l'apparition de dformations permanentes. D'autre part on est amen prendre un
coefficient de scurit pour fixer la contrainte admissible cause des incertitudes sur :
- les mthodes de calcul
- les caractristiques des matriaux
- la valeur des charges appliques et leur modlisation
Si s est la coefficient de scurit choisi, la contrainte admissible s'crit :
ad
=
S
e
Les valeurs de s varient de 1,5 ( aviation, gnie civil) 10 (mcanismes subissant des chocs lorsque la scurit est fondamentale).
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
29
CHAPITRE 4 :
TRACTION / COMPRESSION SIMPLES
I - DEFINITION :
On entend par traction (ou compression) une charge telle que tous les lments de
rduction du torseur des forces de cohsion sont nuls sauf N 0 ( M
F
= Mt = T = 0)
- F + N = 0 ==> N = F
N > 0 ==> Traction
+ F + N = 0 ==> N = -F
N < 0 ==> Compression
Toute barre en quilibre sous l'action de 2 forces appliques ses extrmits est
sollicite en traction ou en compression.
X
Traction
X
Compression
F F
1 2
S
1
S
2
F F
1 2
1
1
F
F
N
N
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
30
II - CONTRAINTE DANS UNE SECTION DROITE D'UNE POUTRE
Figure 4.1 : poutre sollicite en traction
Considrons une section S situe une distance d suprieure la dimension
transversale a de la poutre afin que le mode d'application des charges n'ait plus
d'influence sur les effets mcaniques observs dans cette section ( hypothse de st
venant).
Au cours de l'essai de traction, pour une charge infrieure la limite lastique,
l'allongement de l'prouvette est la principale dformation observe. Les sections
restent planes et perpendiculaires la ligne moyenne qui est rectiligne. Toutes les
lignes parallles la ligne moyenne ont subi le mme allongement. Il est alors naturel
de supposer que, dans le cas d'un matriau homogne, les forces intrieures sont
uniformment rparties dans toute la section. Cette rpartition n'est valable que pour :
- des poutres dont les dimensions transversales varient faiblement et d'une faon
continue.
- des sections suffisamment loignes du point d'application des charges
la contrainte est donc la mme pour les points de la section :
III - CONDITIONS DE RESISTANCE :
La poutre sollicite en traction ou en compression doit pouvoir rsister en toute
scurit.
d
a
b
X
F
S
S
N
=
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
31
En fonction des caractristiques du matriau ( limite lastique
e
) et de la
scurit dsire ( coefficient de scurit s), on fixe une valeur que la contrainte normale
ne doit pas dpasser. Cette valeur minimale est appele contrainte admissible (
ad
). la
condition de rsistance s'crit donc :
= <
ad
=
e
s
<
adt
: en traction
<
adc
: en compression
V - ETUDE DE LA DEFORMATION :
V.1 - Allongement axial - loi de Hooke
Considrons la courbe = F() d'un essai de traction ( Fig. 3.2) d'un matriau o est
la dilatation linique relative dfinie par =
l
lo
avec l = l - lo.
Figure 4.2 : Courbe = f()
En se plaant dans le domaine lastique, la droite OA a un coefficient directeur
constant gal / = E
E : module d'lasticit longitudinal ou module de Young ( en N/mm
2
ou MPa)
La relation : = E . est appele loi de Hooke.
e
O
Domaine lastique
S
N
S
N
S
N
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
32
IV.2 - Contraction des dimensions transversales :
On constate exprimentalement que l'allongement axial entrane une contraction
des dimensions transversales.
Dans le domaine lastique les contractions transversales
sont proportionnelles la
dilatation longitudinale relative (avec
: allongement perpendiculaire l'effort) :
= - .
avec : coefficient de Poisson (caractrise le matriau)
Calculons la variation de volume d'une poutre prismatique de section carre (ct = a )
et de longueur initial l
o
.
- longueur aprs dformation : l = l
o
( 1 + )
- air de la section aprs dformation : S : [a ( 1 - ) ]
2
- volume de la poutre aprs dformation : V = l . S = l
o
a
2
( 1 + ) ( 1 - )
2
En ngligeant les termes
2
,
2
2
et
2
3
, il vient :
V = l
o
a
2
( 1 + - 2 ) , V
o
= l
o
a
2
La dilatation volumique relative s'crit :
) 2 - 1 ( =
Vo
V
=
Vo
Vo - V
=
tant toujours positive, la valeur du coefficient de Poisson, quel que soit
le matriau, sera compris entre 0 et 0,5 pour les matriaux isotropes est gnralement
voisin de 0,30.
V - NOTION SUR LES PHENOMENES DE CONCENTRATION
DES CONTRAINTES:
L'hypothse de la rpartition uniforme des contraintes n'est valable que si l'on fait
abstraction de certaines zones particulires de la poutre :
- zone d'application des charges
- zones o la section de la poutre varie brusquement.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
33
Exemple :
Les essais et la thorie d'lasticit ont permis de dterminer dans la majorit des
cas, des coefficients de concentration des contraintes permettant de calculer la
contrainte maximale :
avec K : coefficient de concentration des contraintes
La condition de rsistance de la poutre s'crit dans ce cas :
F
Zone de concentration des contraintes.
F
S
F
K K
moy i
= =
max
adt moy
et moy i
K =
max
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
34
V.1 - Cas d'un paulement sur un arbre
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
35
A.2 - Arbre avec gorge
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
36
V.3 - Filetage triangulaire
Le coefficient de concentration de contraintes k = 2,5
V.4 - Plaque avec paulement
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
37
V.5 - Plaque avec deux entailles
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
38
V.6 - Plaque avec lumire
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
39
VI - REMARQUES CONCERNANT LA COMPRESSION :
- Pour que la poutre soit sollicite en compression pure, il faut que ses
dimensions respectent la condition suivante :
longueur
- La relation entre
et
et
ec
pour diffrents matriaux s'crit :
ec
= 3
et =====>
pour les fontes et matires plastiques.
ec
= 1,25
et ===>
pour les bronzes.
ec
=
et =======>
pour les aciers, l'aluminium et ses alliages, les
cuivres, les laitons lamins, le plomb, le zinc,
les polymres.
3 x (Grandes
dimensions
transversales)
8 x (petites dimensions
transversales)
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
40
CHAPITRE 5
SYSTEMES ARTICULES
PLANS
I - GENERALITES :
I.1 - Dfinition :
Un systme rticul est un ensemble constitu par des barres rigides articules
entre elles leurs extrmits, les forces extrieures tant appliques aux noeuds.
I.2 - Hypothses
- Toutes les barres sont lies entre elles par des articulations parfaites (Frottement
nglig).
Dans la pratique ce ne sont pas des articulations, on rencontre les barres
assembles rigidement ( soudures ou rivets). Mais l'exprience montre que l'erreur
commise en supposant que se sont des articulations parfaites reste gnralement
acceptable ( erreur < 10 % si les lignes des centres de gravit des barres sont
concourantes).
- Les forces extrieures sont dans le mme plan et s'exercent uniquement aux
noeuds.
- Le poids des barres est ngligeable devant les autres efforts.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
41
- Le systme est isostatique extrieurement.
I.3 - Consquences des hypothses :
Tous les moments sont nuls au niveau des barres ainsi que l'effort tranchant :
M
F
= M
t
= T = 0 est seul N 0
Donc, toutes les barres sont soumises des sollicitations de type traction ou
compression.
I.4 - Rigidit d'un systme articul :
Un systme articul est rigide si il est isostatique intrieurement, c'est--dire si le
nombre d'inconnues (n
i
) est gal au nombre d'quation (n
e
).
- Exemple 1 :
3 barres ==> 3 inconnues : N
1
, N
2
, N
3
isostatique extrieurement ==> 3 inconnues
quilibre des 3 noeuds ==> 6 quations
n
i
= 3 + 3 et n
e
= 6
n
i
= n
e
==> Systme isostatique intrieurement et extrieurement
- Exemple 2 :
n
i
= 3 + 4 = 7
n
e
= 4 noeuds x 2 = 8
n
e
> n
i
==> Le systme est hypostatique ==> systme
instable
- Exemple 3 :
n
i
= 6 barres + 3 = 9
n
e
= 4 noeuds x 2 = 8
n
e <
n
i
==> Systme hyperstatique intrieurement.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
42
Nous traiterons uniquement les systmes isostatiques intrieurement et
extrieurement. Pour ceci, nous avons la relation suivante :
2 n = b + 3
avec :
n : nombre de noeuds
b : nombre de barres
Cette condition sera vrifie avant tout calcul de systme articul.
II - ETUDE TYPIQUE D'UN SYSTEME ARTICULE :
L'tude d'un systme articul passe par les tapes suivantes :
a) Calcul des ractions, en isolant le systme articul tudi.
Les quations de la statique classique permettent de dterminer les
composantes des ractions.
b) Calcul des efforts dans les barres en utilisant soit la mthode analytique
(mthode de Ritter), soit la mthode graphique ( mthode de Crmona).
Afin d'illustrer l'utilisation de ces deux mthodes, nous allons considrer le
systme rticul suivant :
n = 4 noeuds
b = 5 barres
2n = b + 3 ==> 8 = 5 + 3
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
43
- Calcul des ractions extrieures :
- Proj F/ox = 0 ==> R
AX
+ R
B
= 0
- Proj F/oy = 0 ==> R
AY
- 2F = 0
- M
t
/ A = 0 ==> R
B
. a - Fa
3
2
- Fa 3 = 0
d'o : R
AX
=
3 3
2
F
R
AY
= 2F
R
B
=
3 3
2
F
II.1 - Application de la mthode analytique de Ritter :
a) Principe :
Cette mthode est utilise lorsque le systme articul ne possde que peu
de barres ou lorsque l'on ne recherche les efforts que dans un petit nombre de
barres.
Le principe de la mthode de Ritter est le suivant :
- couper le systme par une surface traversant trois barres au
maximum non concourantes
- Ecrire l'quilibre de la partie isole.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
44
b) Application:
Coupe S
I
: quilibre de la partie gauche :
M
t
/A = 0 ==>
3 3
2
F.a + N
BD
cos 30 . a = 0 ==> N
BD
= -3F
Coupe S
I
: quilibre de la partie droite
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
45
* M
t
/c = 0 ==> F. cos 30 .a - N
AD
cos 30 . a = 0 ==> N
AD
= F
* M
t
/D = 0 ==> - F cos 30 a + N
AC
cos 60 .a = 0 ====> N
AC
= 3F
Coupe S
II
: quilibre de la partie suprieure :
M
t
/ A = 0 ==> - Fa 3 - N
DC
cos 60 . a 3 = 0 ==> N
DC
= -2F
Coupe S
II
: quilibre de la partie infrieure :
M
t
/D = 0 ==>
3 3
2
F. cos 60 . a - N
AB
cos 30.a = 0 => N
AB
=
3
2
F
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
46
Tableau rcapitulatif de sollicitations :
Barre Valeur de l'effort N Nature sollicitation
AB
+
3F
2
Traction
AC + 3 F Traction
AD + F Traction
BD -3 F Compression
CD - 2F Compression
II.2 - Application de la mthode graphique de Crmona :
a) Rappel sur le polygone des Forces :
Soit un solide (S) soumis un systme de forces exterieures F
1
, F
2
et F
3
.
L'quation F = 0 <==> polygone des forces Ferm
b) Principe de la mthode de Crmona :
La mthode de Crmona consiste quilibrer chaque noeud en traant le
polygone des forces correspondantes le trac est men d'une certaine manire
afin d'viter les constructions doubles.
Le principe de cette mthode peut tre rsum ainsi :
- Numroter toutes les rgions du systme articul dlimits par les
forces ou les barres.
- Chercher un nud ne prsentant que deux inconnues et tracer son
polygone des forces
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
47
- Tracer le polygone des forces du nud voisin qui ne prsente que
deux inconnues et ainsi de suite jusqu' quilibrer tous les nuds.
- L'intensit de la force est obtenue par mesure sur le graphique en
tenant compte de l'chelle. la nature de sollicitation de chaque barre est
dtermine comme ci-dessous :
- barre tirant sur le noeud : traction
- barre poussant sur le noeud : compression
c) Application de la mthode de crmona :
* Noeud qui ne prsente que deux inconnues : c
Polygone au neoud C
chelle : 1 cm ---> F/3
1-6 : barre tirant sur le noeud c,
donc barre AC est soumise
la traction.
6-2 : barre poussant sur le noeud c,
donc barre CD est soumise
la compression.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
48
Polygone au nud voisin D :
6-5 : Barre tirant sur le nud D,
donc AD est soumise la
traction.
5-3 : barre poussant sur le nud D,
donc BD est soumise la
compression.
L'pure de crmona consiste juxtaposer ces deux polygones et
continuer de construire les autres polygones sur le mme graphique.
Tableau rcapitulatif
Barre ou
Raction
Repre Mesure (mm) Intensit Nature
AB 4-5 Traction
AC 6-1 Traction
AD 5-6 Traction
BD 3-5 Compression
DC 2-6 Compression
RA 1-4 Compression
RB 4-3 Compression
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
49
Remarques :
a) Pas de neouds 2 inconnues :
- 1
er
Cas : 2 barres + 1 raction : Calcul analytique de la raction
- 2
me
cas : 3 barres : calcul l'aide de la mthode de Ritter, d'un seul
noeud pour pouvoir dmarrer le polygone
b) Cas de forces non appliques au noeud :
Pour les efforts appliqus en dehors des noeuds, rpartir ces efforts
sur les noeuds voisins. Les barres subissant ce genre defforts doivent tre
vrifies galement la flexion.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
50
CHAPITRE 6
LE CISAILLEMENT
I - DEFINITION :
Une poutre est sollicite au cisaillement si le torseur reprsentant les forces de
cohsion se rduit au centre de gravit d'une seule section droite aux efforts tranchants
T
y
et T
Z
.
La dformation se manifeste par un glissement de la section droite charge par
rapport ses voisines.
Figure 5.1 : Dfinition du cisaillement
II - CONTRAINTE DANS LA SECTION DROITE :
Considrons une poutre encastre sollicite l'aide d'un couteau ( Fig. 5.1)
Isolons la partie de la poutre situe gauche de la section AB :
Les forces appliques ce systme sont :
- Les actions distance : poids de la poutre qui est nglig.
Figure 5.2
t
M
dS
F
e
x
y
A
A
dS
E
E
G
F
: distance trs petite (
= 0,1 mm environ).
A
B
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
51
- Les actions de contact : nous supposons que l'action de l'encastrement sur
la poutre est reprsente par une charge linairement rpartie suivant EE'. la somme de
ces actions lmentaires est gale F
e
. Les forces de cohsion F
i
agissant sur la
section AA' BB' engendrent sur une surface dS autour du point M une contrainte
(M,C).
Le pointeur (M,c) se projette suivant la normale n la section droite : (M, ) et sur le
plan de la section droite : ( M,)
Nous supposons que la rpartition de la contrainte sur la section S est uniforme.
L'quilibre de la partie gauche ( Fig. 5.2) s'crit donc :
Proj/Gx = 0 ==> .S = 0 ==> = 0
Proj/Gy = 0 ==> F
e
+ .S = 0 ==> =
F
S
e
Donc la contrainte tangentielle moyenne dans le section droite est donne par :
=
F
S
e
III - INEQUATION D'QUARRISSAGE :
Pour dimensionner une pice sollicite au cisaillement, nous bornerons la
contrainte moyenne par la rsistance admissible au glissement
a
qui est dfinie par:
a
=
e
s
avec
e
: limite lastique au cisaillement
s : coefficient de scurit.
Donc l'inquation d'quarrissage s'crit :
F
S
e
<
a
La limite lastique au cisaillement
e
est dtermine par un essai de torsion :
- pour les matriaux plastiques :
e
e
/2
- pour les autres matriaux :
e
>
e
/2
IV - DEFORMATION
Si l'on enregistre les dformations en fonction de la charge on obtient, pour
l'acier donc, la courbe suivante :
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
52
La courbe obtenue est fortement semblable celle obtenue lors d'un essai de
traction.
L'angle de glissement : = /G
avec G : module d'lasticit transversale (ou module de coulomb). c'est une
caractristique du matriau.
Exemple : Acier : G = 80 000 N/mm
2
; E = 210 000 N/mm
2
V - APPLICATIONS
V.1 - Poinonnage d'une tle :
j
j
e
O
e
D
t
D
p
Tle
Serre flanc
Poinon
Matrice
F
- Le diamtre du poinon Dp est trs voisin du diamtre du trou dans la matrice Dt
:
Dt = Dp + 2 avec trs faible.
- La section cisaille : S = D
t
. e
- Poinonnage si :
F . D . e .
t r
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
53
V.2 - Liaison par rivet :
Considrons l'assemblage de deux plaques d'paisseur "e" par l'intermdiaire de
trois rivets:
L'inquation dquarrissage s'crit :
=
F
S
e
e
s
S : dans ce cas donn par : S = 3
d
4
2
s : Coefficient de scurit
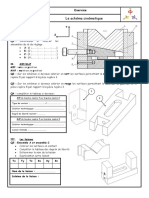
V.3 - Calcul des clavettes
F =
C
R
: Effort sur la clavette
C : Couple transmis
l : longueur de la clavette
Section cisaille S = b .l
F
F
F
e
e
d
h
b
R
C
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
54
La clavette est vrifie au cisaillement : =
F
b.l
e
/s
Elle est galement vrifie au matage :
Pression de contact : p =
2F
hl
Rsistance au Matage :
2F
hl
< Pression admissible
V.4 - Cisaillement des Filets d'un boulon :
La rsistance au cisaillement des filets s'exprime par :
- Vis :
F
D h S
i
a
e
= == =
- Ecrou :
F
D h S
e
a
e
= == =
b
h
h
Di
De
F
Vis
Ecrou
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
55
CHAPITRE 7
CARACTRISTIQUES GEOMETRIQUES
DES SECTIONS
I - MOMENTS STATIQUES
I.1 - Dfinition
Soit une surface (S) et un systme de
coordonnes xoy on appelle moments
statiques de la section S :
- Par rapport ox :
A
ox
= yds
s
- Par rapport oy :
A
oy
= xds
s
I.2 - Axes parallles
Connaissant le moment statique Aox
d'une section (S) par rapport ox, on
peut dterminer le moment statique de
cette mme section par rapport un axe
o'x' parallle ox.
A yds y y ds yds y S
o'x'
s
O
s s
O
= == = = == = = == =
' ( ) .
' '
d'o
A A y S
o'x' ox
= == =
0'
.
De mme que :
A A x S
o'y' oy
= == =
0'
.
X
Y
(S
d
y
x
O
O
dS
(S)
X
Y
X
Y
O
X
o
Yo
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
56
I.3 - Centre de gravit
Considrons l'expression prcdente A
0'x'
= A
ox
- y
0
'
.S et choisissons
y
O'
=
S
Aox
. Le moment statique par rapport o'x' sera nul dans ce cas. Un tel
axe qui prsente un moment statique nul est appel axe central d'inertie.
D'une manire analogue, en choisissant x
0'
=
S
Aoy
, on dfinit un axe central
parallle o'y'.
Le point d'intersection des axes centraux dfinit le centre de gravit ( appel
encore centre d'inertie) de la section.
Par rotation des axes, on montre que le moment statique par rapport n'importe
quel axe passant par le centre de gravit est nul.
Rciproquement si G est le centre de gravit de la section, le moment statique
par rapport Gx' est nul.
Donc :
A
ox
= y
G
. S
A
oy
= x
G
. S
I.4 - Thorme de Guldin
Le volume d'un solide de rvolution est gal au produit de la surface
gnratrice par la circonfrence dcrite par le centre de gravit de cette section :
V = 2 r
G
. S
Application : trouver la position du centre de gravit d'un demi-cercle.
V = 4 R
3
/3, S =
R
2
2
d'o
r
G
=
V
2 . S
=
4R
3
X
Y
x
y
G y
G
x
G
O
r
G
(S)
r
G
G
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
57
II - MOMENTS QUADRATIQUES
II.1 - Dfinition
Soit une section (S) et un repre orthonorm oxy
a) Moment quadratique par rapport un axe :
On appelle moment quadratique de la section (S) par rapport l'axe ox :
I y ds
ox
s
= == =
2
de mme que : (I
ox
et I
oy
toujours positifs)
I x ds
oy
s
= == =
2
b) Moment produit :
On appelle moment produit de la section (S) par rapport au systme d'axe
oxy :
I x yds
oxy
s
= == = .
Notons que si l'un des deux axes ox ou oy est axe de symtrie de la
section, le moment produit par rapport oxy est nul.
x
y
y
x
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
58
c) Moment polaire :
On appelle moment quadratique polaire de la section (S) par rapport 0 :
I dS x y dS I I
o
S S
OX OY
= == = = == = + ++ + = == = + ++ +
2 2 2
( )
II.2 - Thorme de Huygens :
Connaissant les moments quadratiques et produit d'une section par
rapport un systme d'axes, on se propose de calculer ces mmes moments par
rapport un systme d'axes parallles.
I y dS y y dS
O x
1 1
2
1
1 0
2
= == = = == =
( )
do:
I y dS y ydS y S
O x o
1 1 1 1
2
0
2
2 = == = + ++ +
= I
ox
+ y S
o
1
2
- 2y
o
1
A
ox
de mme que:
I x dS x xdS x S
O y o
1 1 1 1
2
0
2
2 = == = + ++ +
I
o y
1 1
= I
oy
+ x
01
2
S - 2x
01
A
oy
et :
I
O1x1y1
= I
oxy
- x
01
A
ox
- y
01
A
oy
+ x
01
y
01
S
Cas particulier :
Si o est le centre de gravit de la section : A
ox
= A
oy
= 0 Donc , dans ce
cas on a :
I
O1x1
= I
Gx
+ y
01
2
S
I
O1y1
= I
Gy
+ x
01
2
S
x
y
X
1
Y
1
O
O
1
dS
(S)
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
59
I
O1X1Y1
= I
Gxy
+ x
01
y
01
S
Ces relations constituent le thorme de Huyghens qui s'nonce ainsi : le
moment quadratique d'une section par rapport un axe est gal au moment
quadratique de cette section par rapport l'axe passant par le centre de gravit,
augment du produit de l'aire de la section par le carr de la distance des axes.
II.3 - Expressions des moments quadratiques usuels :
a) Moments quadratiques d'un rectangle
dS = bdy
I y dS b y dy b
y
Gx
S h
h
h
h
= == =
= == = = == =
( (( (
( (( (
+ ++ +
+ ++ +
2 2
3
2
2
2
2
3
/
/
/
/
I
Gx
=
bh
3
12
de mme que : I
Gy
=
hb
3
12
b) Moments quadratiques d'une section circulaire
I
G
=
2
dS avec dS = 2d
I
G
= 2 2 2 2
3
0
2 D
d
/
d'o I
G
=
D
4
32
x
y
b
h
G
dy
) (
12 12 12
2 2
3 3
h b
hb hb bh
I
G
+ = + =
D
d
x
y
G
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
60
Le point G est le centre du cercle, par symtrie on a : I
Gx
=
I
Gy
I
G
= I
Gx
+ I
Gy
= 2 I
Gx
= 2I
Gy
d'o
I
Gx
= I
Gy
=
D
4
64
III - MOMENTS QUADRATIQUES D'UNE SURFACE PAR
RAPPORT A UN AXE :
III.1 - Transformation angulaire des coordonnes
Connaissant I
ox
1
,
I
oy
1
et I
ox
1
y
1
,
on se propose de calculer :
I
ox
2
, I
oy
2
et I
ox
2
y
2
Les coordonnes dans les deux repres sont lies par les relations
suivantes:
x
2
= x
1
cos + y
1
sin
y
2
= y
1
cos - x
1
sin
I
ox2
= y dS y x x y dS
S
S
2
2
1
2 2
1
2 2
1 1
2 = == = + ++ + ( cos sin sin cos )
do : I
ox2
= I
ox1
cos
2
+ I
oy1
sin
2
-I
ox1y1
sin2
De mme que:
I
oy2
= I
ox1
sin
2
+ I
oy1
cos
2
+I
ox1y1
sin2
X1
X2
Y1
Y2
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
61
Remarques : I
ox1
+I
oy1
= I
ox2
+I
oy2
= I
o
I
ox2
-I
oy2
= (I
ox1
-I
oy1
)cos2 - 2I
ox1y1
sin2
Dautre part le moment produit par rapport 2 axes :
I
ox2y2
= x y dS
S
2 2
= ( cos sin ) * ( cos sin ) x y y x dS
S
1 1 1 1
+ ++ +
Do I
ox2y2
=
I I
I
ox oy1
ox y1
1
1
2
2 2
+ ++ + sin cos
III.2 - Axes principaux
III.2.1 - Dfinition :
Lorsque le systme d'axes ox
2
y
2
tourne autour de O, la quantit (I
ox
2
+
I
oy
2
) reste constante. Donc, si pour une certaine valeur de I
ox
2
est minimal,
I
oy
2
est maximal, et rciproquement. De tels axes, pour lesquels les moments
quadratiques sont respectivement maximum et minimum, sont appele axes
principaux. S'ils passent par le centre de gravit, ils sont appels axes centraux
principaux.
III.2.2 - Position des axes principaux :
Si I
ox
2
est minimum ou maximum :
dI
d
ox2
=0
Si I
oy
2
est maximum ou minimum :
dI
d
oy2
=0
Reprenons les relations vues prcdemment :
I
ox1
+I
oy1
= I
ox2
+I
oy2
I
ox2
-I
oy2
= (I
ox1
-I
oy1
)cos2 - 2I
ox1y1
sin2
Ces relations donnent :
I
ox2
=
I I
x oy 0 1 1
2
+ ++ +
+
I I
x oy 0 1 1
2
cos2 - I
ox1y1
sin2
I
oy2
=
I I
x oy 0 1 1
2
+ ++ +
-
I I
x oy 0 1 1
2
cos2 + I
ox1y1
sin2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
62
Soit :
dI
d
ox2
= -(I
ox1
-I
oy1
)sin2 - 2I
ox1y1
cos2 = = = = 2I
ox2y2
et
dI
d
oy2
= (I
ox1
-I
oy1
)sin2 + 2I
ox1y1
cos2 = + = + = + = +2I
ox2y2
donc :
dI
d
ox2
=
dI
d
oy2
=0 ====> I
ox2y2 =0 ======>
(I
ox1
-I
oy1
)sin2 = -2I
ox1y1
cos2
d'o :
tg2 =
2
1 1
1 1
I
I I
ox y
oy ox
IV - DETERMINATION GRAPHIQUE DES MOMENTS
QUADRATIQUES- CERCLE DE MOHR
IV.1 - Problme direct :
On connat les axes principaux ox et oy, On recherche les moments
quadratiques par rapport 2 axes Ox
1
et Oy
1
faisant un angle connu avec les
axes principaux.
Donc, les donnes de ce problme sont : I
ox
, I
oy
, I
oxy
= 0 et .
Hypothse:
I
ox
> I
oy
1) on trace OA = I
ox
2) On trace OB = I
oy
3) On trace OC =
I Ioy
ox
+ ++ +
2
4) On trace le cercle de centre
C et rayon CA.
5)On trace l'axe faisant 2 avec
OA.
OH = OC + CH = OC + CM cos 2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
63
or
OC =
I I
ox oy
+ ++ +
2
et CM = CA =
2
OB OA
=
I I
ox oy
2
d'o
OH =
I I
ox oy
+ ++ +
2
+
I I
ox oy
2
cos 2 = I
ox1
OH' = OC + CH' = OC - CM' cos 2
=
I I
ox oy
+ ++ +
2
-
I I
ox oy
2
cos 2 = I
oy1
HM = CM sin2=
I I
ox oy
2
sin 2 = I
ox1y1
Le rsultat donc s'exprime en mesurant les quantits suivantes :
I
ox1
= OH , I
oy1
= OH' et I
ox1y1
= HM
IV.2 - Problme inverse :
Soient deux axes ox
1
et oy
1
, et on recherche la position des axes
principaux ox et oy par rapport ces deux axes.
Les donnes pour ce genre de problme sont : I
ox1,
I
oy1
et I
ox1y1
.
Les inconnus rechercher sont : I
ox
, I
oy
et
hypothse: I
ox
1
> I
oy
1
1) on trace OH = I
ox
1
2) On trace OH' = I
oy
1
3) On trace HM = - I
ox
1
y
1
4) On trace OC =
2
1
1
oy ox
I I +
5) On trace le cercle de centre
C et de rayon CM
Le rsultat s'exprime alors par :
I
ox
=
OA , I
oy
= OB et ( CM,CA) = 2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
64
CHAPITRE 8
TORSION
I - GENERALITES :
I.1 - Dfinition
:
Une poutre est sollicite la torsion si le systme des forces extrieures
cre des forces de cohsion reprsentables par un torseur dont le seul lment de
rduction au centre de gravit de chaque section droite S est appel moment de
torsion.
M
t
= M
x
Figure 7.1 : Torsion
I.2 - Limitations :
Les hypothses de la R.d.M., ajoutes la dfinition prcdente,
conduisent aux conclusions suivantes :
- seules les poutres droites peuvent tre soumises la torsion pour que le
moment de torsion soit port par la ligne moyenne. Les poutres courbes sont
soumises des sollicitations composes.
- Une section plane avant dformation devant rester plane au cours de la
dformation, la R.d.M. ne peut donc tudier que la torsion des poutres de
rvolution. pour les autres poutres, il sera ncessaire de faire appel la thorie
de l'lasticit.
x
y
z
M
x
x
G
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
65
II - CONTRAINTES ET DEFORMATION D'UN ARBRE
CYLINDRIQUE :
II.1 - Essai de torsion :
On ralise un essai de torsion sur un arbre cylindrique de section
constante en appliquant ses extrmits deux couples opposs M
t.
Figure 7.2 : Essai de torsion
Si l'on trace une gnratrice AB sur l'arbre avant l'essai. Aprs celui-ci,
l'arbre s'est dform et la gnratrice AB s'est transforme en hlice AB'.
On constate galement que les sections droites restent planes et qu'il n'y a
aucune dformation de ces sections. Chaque section droite tourne autour de
l'axe de l'arbre sans subir la moindre dformation.
II.2 - Etude de la dformation :
Une gnratrice AB, situe une distance r de l'axe, est dforme en AB',
hlice moule sur un cylindre de rayon r, cette dformation est reprsente sur
la figure (7.3a). L'hlice AB', dveloppe sur la figure (7.3b), est incline d'un
angle ' par rapport l'axe.
Figure 7.3 : Etude de la dformation
x
y
M
t
A
B
G
M
t
B
S
A
B B
l
B
B
r
A
Fig. 7.3a
Fig.
7.3b
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
66
La relation liant et s'crit :
l tg = r.
Si la dformation de la poutre reste dans le domaine lastique,
l'exprience montre que cet angle est trs faible : tg =
d'o:
= == = = == =
r
l
r
En appelant =
l
: angle unitaire de torsion ( en rad/m)
La loi de Hooke s'crit dans ce cas : = == = = == = G Gr
Isolons une partie de l'arbre, celle-ci est en quilibre sous l'action du
moment de torsion et des forces de cohsion ( Fig 7.4)
Figure 7.4
L'quilibre ==>
M
t
- r dF = 0
avec dF = .ds
d'o
M
t
= . rdS
r
r+dr
M
t
+d
y
z
dF
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
67
II.3 - Expression de la contrainte de cisaillement :
M
t
= . rdS avec = Gr
d'o
M
t
= G r
2
dS = G
G =
I
M
O
t
La contrainte de cisaillement s'exprime alors par
)
r
I
(
M
=
o
t
La contrainte de cisaillement est donc proportionnelle la distance du
point considr l'axe de l'arbre.
Dans une section de la poutre, on obtient le diagramme des contraintes suivant :
Maxi
=
I
M
O
t
. R
Si un arbre de longueur L, de section constante est soumis un moment de
torsion constant, la rotation d'une extrmit par rapport l'autre est :
y
z
O
R
Maxi
Maxi
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
68
=
M
t
GI
o
dx
0
l
==> =
M
t
. l
GI
o
Rappel :
Pour un arbre de section circulaire : Io =
D
32
4
==>
Io
R
=
D
16
3
Pour un arbre de section tubulaire : Io=
(D - d )
32
4 4
=>
Io
R
=
(D - d)
16D
4 4
III - CONCENTRATION DE CONTRAINTES EN TORSION
Comme pour les pices en traction, lorsque le diamtre de l'arbre varie
brusquement il y a apparition de concentration de contraintes. La valeur
maximale de la contrainte est dtruite partir de la contrainte nominale l'aide
d'un coefficient :
Maxi
= k
to
nom
= k
to
( r
I
M
O
t
)
Exemples : Arbre paul
nom
=
16M
d
t
3
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
69
IV - RESISTANCE ET RIGIDIT :
La condition de rsistance d'une poutre en torsion, de rayon R est :
Maxi
s
e
==>
M
(
Io
R
)
t
s
e
La condition de rigidit d'une poutre en torsion s'crit :
Max
soit
M
GI
t
o
Max
V - COMPORTEMENT DES MATERIAUX :
a) Relation entre E et G :
Pour les aciers, les fontes, l'aluminium et ses alliages, les bronzes, les
laitons, le plomb et le zinc, la relation entre le module d'lasticit longitudinale
E et le module d'lasticit transversale est : G ~ 0,4 E
Exemple : Acier doux E = 2.10
11
N/m
2
G = 0,8 .10
11
N/m
2
b) Relation entre
e
et
e
- Zinc .................................
e
= 1,2
e
- Fontes et bronze...............
e
=
e
- Aciers, aluminium et alliages, cuivres, laiton, Plomb :
e
= 0,5
e
IV - TORSION DES PROFILS NON CIRCULAIRES :
Lorsque les sections sollicites en torsion ne sont pas circulaires, les
sections ne restent pas planes et les formules tablies pour les sections
circulaires ne sont plus valables.
Les formules ci-aprs ont t tablies par la thorie d'lasticit.
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
70
Torsion des profils non circulaires :
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
71
CHAPITRE 9 :
FLEXION PLANE - CONTRAINTES
I - DFINITION ET HYPOTHESES
Soit la poutre suivante :
On dit qu'elle est sollicite en flexion plane si :
a) Le moment de flexion M
z
( ou M
y
) est non nul
b) La section de la poutre possde un axe de symtrie Gy ( ou Gz)
c) Toutes les charges sont appliques dans un mme plan qui est le plan
de symtrie de la poutre Gxy (ou Gxz).
En rsum, nous avons les cas suivants :
si M
x
= M
t
=0 N = 0 , T
y
= 0 ----> Flexion pure (Sollicitation
rare)
et M
z
= M
f
0 N = 0 , T
y
0 ----> Flexion simple
N 0 , T
y
0 ---> Flexion compose.
Dans le cas o les forces extrieures n'appartiennent pas au plan de
symtrie de la poutre, il y a flexion dvie ( ou flexion gauche ).
Exemple:
G
x
y
z
G
z
y
F
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
72
II - DIAGRAMMES DU MOMENT FLECHISSANT ET DE L' EFFORT
TRANCHANT.
Afin de dterminer la section droite la plus sollicite, nous allons tudier
les variations de M
z
et de T
y
en fonction de la position de la coupure fictive.
Deux types de charges peuvent tre rencontres, les charges concentres et les
charges rparties.
II.1 - Cas des charges concentres :
Exemple trait :
A.N. : F
1
= 600 N
F
2
= 1200 N
a = 1 m
b = 2 m
l = 3 m
Calcul des ractions avec les quations classiques de la statique :
d'o
R
A
=
F l a F l b
l
y
1 2
( ) ( ) + ++ +
= 800 y , R
B
=
aF bF
l
y
1 2
+ ++ +
= 1000 . y
Recherchons maintenant la valeur de l'effort tranchant et du moment de
flexion dans une section droite situe entre les points A et C.
[ T
fe
/1
]
G
= [T
fi/2
]
G
[ T
fi/2
]
G
=
R GA = fi/2) M
R = S
A
(
G
A fi/2
x
y
z
a
b
l
F
1
F
2
A
B
C D
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
73
- Donc pour 0 < x < a :
T
y
(x)= R
A
=800 N
M
Z
(x)=-x.R
A
=-800.x
- Pour a < x < b :
T
y
(x)= R
A
-F
1
=200 N
M
Z
(x)=-x.R
A
+F
1
(x-a)=-200.x-600
- Pour b < x < l :
T
y
(x)= R
A
-F
1
-F
2
=-1000 N
M
Z
(x)=-x.R
A
+F
1
(x-a)+F
2
(x-b) =1000.x-3000
Le diagrammes
Remarques
- L'effort tranchant T
y
(x) est constant entre deux points d'application.
- La fonction M
z
(x) est une fonction affine, l'expression de cette fonction
est la mme pour toutes les sections comprises entre deux points d'application
des efforts.
Ty(x) en N
+800
+200
-1000
A
B
C D
x
x
Mz(x) en m.N
A C D B
-800
-1000
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
74
II.2 - Cas des charges rparties :
Exemple trait :
Les quations de la statique classique permettent de dterminer les
ractions R
A
et R
B
.
* Expressions du moment flchissant et de leffort tranchant dans les diffrentes
zones :
Zone AC : O x a
T
Y
(x)= R
A
M
Z
(x)= -R
A
.x
Zone CD : a x b
T
Y
(x)= R
A
- q( d
a
x
)
M
Z
(x)= -R
A
.x + ( ) ) x q( d
a
x
La connaissance de l'expression de q ( ) permet de raliser les
intgrations .
Zone BD : b x l :
T
Y
(x)= R
A
- q(x dx
a
b
)
M
Z
(x)= -R
A
.x + ( ) ) x q( d
a
b
L'allure des diagramme de T
Y
(x) et M
Z
(x) dpend de l'expression de q()
x
y
z
a
q(x)
A
C D
B
b
l
A
x
y
q()
d
x
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
75
III - RELATION ENTRE LE MOMENT FLECHISSANT ET
L'EFFORT TRANCHANT
Considrons un lment de poutre x sollicit en flexion simple :
Isolons l'lment x
Avec :
[T
f
i1/2
]
G
=
[T
F
e/1
]
G
qui se rduit en flexion plane deux composantes :
T
y
(x)
M
z
(x)
[T
f
i3/2
]
G1
= - [T
f
i2/3
]
G1
= - [T
f
i1/2
]
G1
=
- T (x + x)
- M (x + x)
y
z
( car [T
f
i2/3
]
G1
= [T
fe/2
]
G1
=
[T
fe/1
]
G1
=
[T
fi1/2
]
G
)
Donc, l'quilibre de l'lment x se rsume ainsi :
* M
t
/G
1
z = 0 ==> M
Z
(x) - M
Z
( x + x) - T
Y
(x). x = 0
x
F
2
F
1
1 2
3
y
x
2
x
z
O
G G
1
T
fi
1/2
G
T
fi
3/2
G
1
x
G
1
G
y
z
-M
z
(x+x)
Mz(x)
T
y
(x)
-T
y
(x+x)
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
76
d'o :
Ty(x) =
x
x M x x M
Z Z
+ ++ +
) ( ) (
==>
Donc, l'effort tranchant dans une section est gale la drive du moment
de flexion par rapport l'abscisse de la section, change de signe .
IV - CONTRAINTES DANS LES POUTRES SOLLICITEES EN
FLEXION PLANE :
IV.1 - Contraintes normales
Considrons une poutre sollicite en flexion pure et cherchons la
rpartition des contraintes. les formules qui seront tablies restent valables pour
la flexion simple galement .
Soit un lment de poutre dx :
F
=
MM'
dx
avec MM' = - y tg d
Petites dformations ==> d petit ==> tg d = d
d'o
F
= - y
d
dx
La loi de Hooke s'crit :
f f
E Ey
d
dx
= == = = == =
x
y
z
dx
M
0
M M
y
d
G
0
G
Ligne neutre
dx
x dMz
x Ty
) (
) ( = == =
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
77
Distribution de la contrainte normale
f
:
Equilibre de l'lment dx :
Or
yds = A
oz
= 0 ==> La ligne neutre passe par le centre de gravit de la
poutre
Mt GZ M yds M yds
Z f
s
Z f
/ = == = ===> ===> ===> ===>
= == = ===> ===> ===> ===> = == = = == =
0 0 0
d'o
GZ Z I
dx
d
E ds y
dx
d
E M
= =
2
==> E
d
dx
M
I
Z
GZ
= == = + ++ +
La contrainte normale due la flexion s'exprime donc par:
f
Z
GZ
M
I
y
= == =
( )
Les contraintes maximales apparaissent sur les fibres les plus loignes
de la ligne neutre :
f
Z
GZ
M
I
y
max
max
( )
= == =
I
y
GZ
max
: Module de flexion, caractrise la section de la poutre;
M
z
x
y
z
y
G
dx
G
0
O
f
Traction
Compression
Pr / oj ox ds E
d
dx
yds
f
s
= == = ===> ===> ===> ===>
= == = ===> ===> ===> ===> = == =
0 0 0
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
78
Exemples :
Section rectangulaire :
I
bh
y
h
GZ
= == =
= == =
3
12
2
max
===>
I
y
bh
GZ
max
= == =
2
6
Section circulaire :
I
d
y
d
GZ
= == =
= == =
4
64
2
max
===>
I
y
d
GZ
max
= == =
3
32
IV.2 - Contrainte tangentielle
Revenons l'lment x soumis la flexion simple :
Nous avons dmontr que T = -
d M
z
dx
(paragraphe III)
Etudions l'quilibre de la partie hachure situe y
o
de la ligne neutre :
Z
y
b
h
G
d
z
y
G
G
0
G
M
z
(x)
M
z
(x+x)
x
Y
0
T
y
(x+x)
T
y
(x)
x
x
(y
0
)
S S
0
fG
fG0
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
79
proj ox ds ds y ds
fG fG
S S S
/ ( )
' ' '
= == = =====> =====> =====> =====> + ++ +
= == = 0 0
0
0
0
0
Afin de simplifier le problme, on admet les hypothses suivantes :
(y
o
) = Constante sur l'lment x
b
o
: largeur de la poutre y = y
o
S' = S'
o
Donc on a :
( ) ( ). .
'
fG fG
S
ds y x b
= == =
0
0 0
0
( ) ( ). .
'
M M
I
yds y x b
ZG ZG
GZ
S
= == =
0
0 0
Ce qui peut s'crire encore :
( )
.
( ). .
'
M M
x
x y
I
ds y x b
ZG ZG
S
GZ
= == =
0
0 0
( )
.
.
.
( ' )
'
y
T
I b
yds
T
I b
A S
y
GZ
S
y
GZ
GZ 0
0 0
= == = = == =
(y ) = +
T
I . bo
. A (S')
o
y
GZ
GZ
Exemple : Section rectangulaire
h
b
y
z
Y
0
G
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
80
do:
( ) ( ) y
T
S
y
h
0
0
2
3
2
1
2
= == =
( (( (
( (( (
V - CONDITION DE RESISTANCE
L'exprience montre que les contraintes tangentielles dues aux charges
extrieures restent faibles par rapport aux contraintes normales en flexion plane.
Donc les dimensions de la section droite de la poutre seront dtermines partir
des inquations suivantes :
t
Z
GZ
adt
M
I
Y
= == =
max
max
et
c
Z
GZ
adc
M
I
Y
= == =
max
max
VI - CONCENTRATION DES CONTRAINTES :
Les formules de flexion que nous avons tablies sont valables pour une
poutre de faible hauteur ( h < 6l), de section variant faiblement et de petite
courbure.
Si la section varie brusquement, il y a concentration des contraintes comme
dans le cas de la traction :
max
max
max
. . = == = = == = K K
M
I
y
t calc f
z
GZ
Les valeurs du coefficient de concentration des contraintes K
f
sont
obtenues par la thorie dlasticit ou par lexprience.
(y
0
)
+h/2
-h/2
y
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
81
Les valeurs de K
f
sont donnes pour les principaux cas de concentration
des contraintes par les tableaux ci-dessous :
A - Pices prismatiques
R/d
2.00 1.00 0.66 0.50 0.33 0.25
0.05 1.60 1.90 2.00
0.10 1.50 1.70 1.73 1.74 1.76 1.77
0.20 1.38 1.47 1.50 1.52 1.53 1.54
0.27 1.33 1.38 1.39 1.395 1.398 1.40
0.50 1.21 1.22 1.225 1.23 1.235 1.24
1.00 1.07 1.08 1.085 1.09 1.095 1.10
B - Pices cylindriques avec rainure
R/d 0.05 0.10 0.20 0.30 0.40 0.50
K
f
2.90 2.20 1.70 1.48 1.38 1.30
C - Pices cylindriques avec cong
R/d 0.10 0.20 0.30 0.50
K
f
1.80 1.50 1.35 1.20
Vrification d'une pice en flexion :
t
Z
GZ
adt
M
I
Y
= == =
max
max
et
c
Z
GZ
adc
M
I
Y
= == =
max
max
K
f t et
et K
f c ec
H
h
d
R
d
R
R
d
D
R/h
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
82
CHAPITRE 10:
FLEXION PLANE - DEFORMATIONS
I - EQUATION DIFFERENTIELLE DE LA DEFORMEE
D'UNE POUTRE
Pour tablir cette quation nous allons considrer deux sections droites
voisines S
o
et S, distantes de dx :
G
0
G=dx : ne change pas de longueur aprs
dformation
(Appartient la fibre neutre)
Nous avons obtenu au chapitre prcdent :
E
d
dx
M
I
Z
GZ
= == = + ++ +
Considrons le triangle OG
0
G:
OG
o
= : rayon de courbure
G
o
G = dx= - d ==>
1
= == =
d
dx
L'inverse du rayon de courbure
1
exprime la courbure de la poutre au
point O. On dmontre en gomtrie analytique que :
x
y
O
A
B
G
S
0
S
A
0
B
0
G
0
O
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
83
1
1
2 3/2
= == =
+ ++ +
Y
Y
' '
( ' )
petites dformations ==>
1
Y x ' ' ( )
d'o la relation
Y x
M x
EI
z
GZ
' ' ( )
( )
= == =
Cette quation diffrentielle admet une solution y = F(x) qui reprsente
l'quation de la ligne lastique ou l'quation donnant la flche de la poutre en
tout point.
II - RECHERCHE DE L'EQUATION DE LA LIGNE
ELASTIQUE
II.1 - Mthode classique :
Soit tablir l'quation de la ligne lastique pour la poutre suivante :
Expression du moment de flexion :
M
z
(x) = - F . x
Equation de la flche :
Y x
M x
EI
F
EI
x
Z
GZ GZ
' ' ( )
( )
. = == = = == =
A
B
x
L
F
y
z
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
84
Y x
F
EI
x
C
GZ
' ( ) = == = + ++ +
2
1
2
Y x
F
EI
x
C x C
GZ
( ) . = == = + ++ + + ++ +
3
1 2
6
Les constantes d'intgration C
1
et C
2
sont dtermines l'aide des
conditions aux limites :
au point B on a un encastrement :
dy
dx
x l ( ) = == = = == = 0 et y l ( ) = == = 0
do:
F
EI
l
C
GZ
2
1
2
0 + ++ + = == = et
F
EI
l
C l C
GZ
3
1 2
6
0 + ++ + + ++ + = == = .
Ce qui donne: C
Fl
EI
GZ
1
2
2
= == = et C
Fl
EI
GZ
2
3
3
= == =
y x
F
EI
x l
x
l
GZ
( ) . = == = + ++ +
( (( (
( (( (
3 2 3
6 2 3
La flche maximale a lieu pour x = 0
y = y (0) =
F. l
3 E I
Maxi
3
GZ
x
B
L O
y
maxi
Y(x)
A
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
85
II.2 - Mthode des paramtres initiaux :
Lorsque le systme de charge divise la poutre en plusieurs tronons ( plus
de deux), il est conseill d'utiliser la mthode des paramtres initiaux pour
dterminer l'quation de la ligne lastique. le principe de cette mthode est
expos ci-aprs.
Soit dterminer l'quation de la ligne lastique de la poutre suivante :
Le systme de charge divise la poutre en 5 zones.
Expression du Moment Flchissant :
- Zone (1) : 0 < x < a ---> M
z
1
(x) = 0
- Zone (2): a <x <b ---> M
z
2
(x) = M
- Zone (3): b < x <c ---> M
z
3
(x) = M + F( x - b)
- Zone (4): c < x <d ---> M
z
4
(x) = M + F(x - b) +
2
2
q
c) (x
- Zone (5): d < x< l ---> M
z
5
(x) = M+F(x - b) +
2
2
q
c) (x
) -
2
2
q
d) (x
Le moment de flexion s'crira sous la forme :
M x M F x b
q x c q x d
z
( ) ( )
( ) ( )
= == = + ++ + + ++ + + ++ +
0
2 2
1 2 3 4 5
2 2
x
y
A
B
a
b
c
d
l
M
F
q
1 2 3
4
5
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
86
Expression de y'(x)
Intgrons les expressions des moments flchissant dans chaque zone :
Zone 1: EI y C
GZ
'
1 1
= == =
Zone 2: EI y M x C M x a C
GZ
' . ' ( )
2 2 2
= == = + ++ + = == = + ++ +
Zone 3: EI y M x a
F x b
C
GZ
' ( )
( )
3
2
3
2
= == =
+ ++ +
Zone 4: EI y M x a
F x b q x c
C
GZ
' ( )
( ) ( )
4
2 3
4
2 6
= == =
+ ++ +
Zone 5: EI y M x a
F x b q x c q x d
C
GZ
' ( )
( ) ( ) ( )
5
2 3 3
5
2 6 6
= == =
+ ++ +
+ ++ +
Les constantes C
1
, C
2
, C
3
,C
4
,C
5
sont calcules en exprimant la
continuit de y'(x) entre les diffrentes zones :
x = a on a : y'
1
(a) = y'
2
(a) ==> C
1
= C
2
x = b on a : y'
2
(b) = y'
3
(b) ==> C
2
= C
3
etc
On a alors : C
5
= C
4
= C
3
= C
2
= C
1
= EI
GZ
y'
o
D'o l'expression de y'(x):
EI y x EI y M x a
F x b q x c q x d
GZ GZ
' ( ) ' ( )
( ) ( ) ( )
= == =
+ ++ +
0
2 3 3
1 2 3 4 5
2 6 6
Expression de y(x) :
En intgrant une deuxime fois et en exprimant la continuit de y(x) entre
les diffrentes zones, on a :
EI y x EI y EI y x
M x a F x b q x c
GZ GZ GZ
( ) ' .
( ) ( ) ( )
= == = + ++ +
0 0
2 3 4
1 2 3 4
2 6 24
+ ++ +
q x d ( )
4
24
5
L'avantage de cette mthode rside dans le fait que seules deux constantes
restent dterminer yo et y'o l'aide des conditions aux limites ( en fonction
des liaisons de la poutre avec le milieu extrieure).
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
87
Dans notre cas, la poutre est encastre en x = l; donc les conditions aux limites
sont: y(l)=0 et y(l)=0. Ce qui donne deux quations deux inconnues y
0
et y
0
:
EI y M l a
F l b q l c q l d
GZ
' ( )
( ) ( ) ( )
0
2 3 3
2 6 6
0
+ ++ +
= == =
EI y EI y l
M l a F l b q l c q l d
GZ GZ
0
0
2 3 4 4
2 6 24 24
0 + ++ +
+ ++ +
= == = ' .
( ) ( ) ( ) ( )
III - PRINCIPE DE RECIPROCITE OU THEOREME DE
MAXWELL-BETTI
Les mthodes servant dmontrer le principe de rciprocit de Maxwell-
Betti sortent du cadre de ce cours. dans notre cas, nous allons l'utiliser dans
quelques cas simples.
III.1 - Enonc du principe de rciprocit :
Soit une force F
A
avec |F
A
| = 1, applique en un point A quelconque de
la poutre, suivant une direction
A
. Cette force produit en un point B de cette
poutre un dplacement lastique
A
B
d suivant une direction arbitraire
B
.
Rciproquement, une force F
B
avec |F
B
| = 1, applique en un point B
suivant la direction
B
, produit en A un dplacement lastique suivant la
direction
A
not
A
B
d , tes que :
A
B
d =
B
A
d
A
B
d
x
y
F
A
A
A
O
B
B
x
y
F
B
B
B
A
A
B
A
d
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
88
III.2 - Exemple d'application :
Nous avons vu prcdemment le cas suivant :
y(x) =
(
+
3
L
2
L
6
x
EI
F
3
2
GZ
x 3
y = y(
l
2
) =
5Fl
48EI
C
3
Gz
Soit calculer la flche en un point A du cas suivant :
Thorme de Maxwell-Betti ==> y
FL
EI
A
GZ
= == =
5
48
3
Vrification :
M F x
L
z
= == = 0
2
1 2
( )
F
y
A
B
x L/2
L/2
C
x
y
1 2
A
B C
L/2 L/2
F
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
89
EI y x EI y EI y x
F x
L
GZ GZ GZ
( ) ' .
( )
= == = + ++ + + ++ +
0 0
1
2
2
3
6
y(L) =0 =======> y
FL
EI
GZ
'
0
2
48
= == =
=======> y y
A
C
C
A
= == =
y(L) = 0 =======>y
FL
EI
y
GZ
A 0
3
5
48
= == = = == =
Remarque:
Le thorme de Maxwell-Betti est galement applicable aux moments :
M
A
en A suivant
A
----> en B une rotation
A,B
suivant
A
M
B
en A suivant
B
----> en A une rotation
B,A
suivant
A
si |M
A
| = |M
B
| = 1 ======> on a
A,B
=
B,A
x
y
M
A
A
B
A
B
y'
M
B
x
y
B
A
B
A
y'
Si M
A
=M
B
alors on a :
B
A
A
B
y y ' ' = == =
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
90
Utilit du thorme de Maxwell-Betti :
L'utilisation de ce thorme peut rduire la taille des calculs pour
dterminer la flche des poutres dans certains cas.
IV - Principe de superposition :
Dans le domaine lastique, les effets mcaniques ( contraintes en un
point, ractions aux appuis, les dformations) dus aux forces F
1
, F
2
........F
n
agissant simultanment sur la poutre sont gaux la somme des effets produits
par chacune des forces prises sparment.
Application dans le cas des dformations :
Soit calculer la flche en un point A de la poutre suivante :
- Mthode des paramtres initiaux :
M F x F x
L
z
= == = . ( )
1 2
2
y
F
1
F
2
A C B x
y
F
2
A C B
x
x
F
1
y
A C B
y
F F
L/2 L/2 x
1 2
ENIM Rsistance des matriaux 1 ( Pr B. NAJJI )
91
E I y x E I y F
x
F
x
L
G Z G Z
' ( ) ' .
( )
= == = + ++ + + ++ +
0
2
2
2
2
2
1 2
E I y x E I y E I y x F
x
F
x
L
G Z G Z G Z
( ) ' . .
( )
= == = + ++ + + ++ + + ++ +
0 0
3
3
6
2
6
1
2
y
FL
EI
GZ
'
0
2
5
8
= == = y(L) =0 =======>
y(L) = 0 =======>
- Principe de superposition:
Cas I Cas II
y
FL
EI
A
I
GZ
= == =
16
48
3
y
Fl
EI
A
II
GZ
= == =
5
48
3
do : y y y
FL
EI
A A
I
A
II
GZ
= == = + ++ + = == =
21
48
3
Utilit du principe de superposition : Economie des calculs.
y
FL
EI
y
GZ
A 0
3
21
48
= == = = == =
y
F
x A C
B
y
A C B x
F
S-ar putea să vă placă și
- Cours MefDocument58 paginiCours MefMohcenLaribi50% (2)
- Cours Erp Pgi 2010Document136 paginiCours Erp Pgi 2010Salim ChabouniaÎncă nu există evaluări
- Cours Erp Pgi 2010Document136 paginiCours Erp Pgi 2010Salim ChabouniaÎncă nu există evaluări
- RDM TD (Flexion)Document4 paginiRDM TD (Flexion)Khawla BkÎncă nu există evaluări
- Chap 1 Mecanique Des StructuresDocument9 paginiChap 1 Mecanique Des Structuresعہبد الہحہلہيہمÎncă nu există evaluări
- PolyDocument64 paginiPolydjamelÎncă nu există evaluări
- Les Essais MecaniquesDocument19 paginiLes Essais MecaniquesBaha Sallami100% (1)
- Écrouissage - WikiwandDocument16 paginiÉcrouissage - Wikiwandelie chaneÎncă nu există evaluări
- Généralités Sur Les MatériauxDocument8 paginiGénéralités Sur Les MatériauxLengani Kader EvariceÎncă nu există evaluări
- TénacitéDocument26 paginiTénacitésaraÎncă nu există evaluări
- M21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMDocument63 paginiM21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMNoureddine MansourÎncă nu există evaluări
- Corrige Examen Pathologie 2022Document2 paginiCorrige Examen Pathologie 2022Petit YahiaouiÎncă nu există evaluări
- Materiaux Correction TD3Document3 paginiMateriaux Correction TD3Vivien GonzalezÎncă nu există evaluări
- Trempe Et La Dureté de MasseDocument20 paginiTrempe Et La Dureté de MasseAbdessalam ReÎncă nu există evaluări
- 2 EmbouDocument9 pagini2 EmbouKamel BousninaÎncă nu există evaluări
- Element Finis PDFDocument9 paginiElement Finis PDFAmine NaitÎncă nu există evaluări
- Designation Des Materiaux PDFDocument40 paginiDesignation Des Materiaux PDFZikoÎncă nu există evaluări
- Corps Du RapportDocument37 paginiCorps Du RapportWisdom Serge SerginoÎncă nu există evaluări
- Chapitre I-3Document17 paginiChapitre I-3omarmarri2016Încă nu există evaluări
- RDMDocument66 paginiRDMmohamedÎncă nu există evaluări
- Sujet D Examen Corrige RDM GCDocument5 paginiSujet D Examen Corrige RDM GCAntes de Partir, A.C.Încă nu există evaluări
- Présenté Par: Mlle AIT SIDHOUM Imene IntituléDocument135 paginiPrésenté Par: Mlle AIT SIDHOUM Imene IntituléHic Hem AvgÎncă nu există evaluări
- TP Genie Materiaux-Proprietes Mecaniques MateriauxDocument120 paginiTP Genie Materiaux-Proprietes Mecaniques MateriauxSalah Gharbi67% (3)
- Définitions Et Principes Fondamentaux de La RDMDocument17 paginiDéfinitions Et Principes Fondamentaux de La RDMVal JlÎncă nu există evaluări
- 2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Document10 pagini2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Thamar GomaÎncă nu există evaluări
- Cours PlasticitéDocument33 paginiCours PlasticitéCIAG OmarÎncă nu există evaluări
- Cours FlexionDocument53 paginiCours FlexionIsmail Hmdani100% (1)
- Introduction A La RDMDocument7 paginiIntroduction A La RDMKamel Ibrahim100% (1)
- Comportement À La Flexion Des Poutres enDocument7 paginiComportement À La Flexion Des Poutres enrayamÎncă nu există evaluări
- Introduction À La Science Des Matériaux Exercices Propriétés Générales Des Catégories de MatériauxDocument2 paginiIntroduction À La Science Des Matériaux Exercices Propriétés Générales Des Catégories de MatériauxDelphin KandoloÎncă nu există evaluări
- Thèse: Potentiel Des Fibres Végétales Courtes Dans L'amélioration Du Comportement Mécanique Des MortiersDocument177 paginiThèse: Potentiel Des Fibres Végétales Courtes Dans L'amélioration Du Comportement Mécanique Des Mortiersamine labbetÎncă nu există evaluări
- Essai de TractionDocument34 paginiEssai de TractionMohamed BelbarakaÎncă nu există evaluări
- MDS TD2 SolutionsDocument10 paginiMDS TD2 Solutionsaymen nouariÎncă nu există evaluări
- Pression DiamétraleDocument10 paginiPression DiamétraleDarkedgeÎncă nu există evaluări
- Chapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxDocument5 paginiChapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxFrancis SonkengÎncă nu există evaluări
- Chapitre 3 Caractéristiques Géométriques Des Sections Planes PDFDocument24 paginiChapitre 3 Caractéristiques Géométriques Des Sections Planes PDFHicham BaghdadiÎncă nu există evaluări
- Etude de L'influence Des Contreventements À Ceintures D'étages Sur Le Comportement D'ossatures Métalliques D'immeubles PDFDocument75 paginiEtude de L'influence Des Contreventements À Ceintures D'étages Sur Le Comportement D'ossatures Métalliques D'immeubles PDFghiles mehÎncă nu există evaluări
- TP Métaux1 TractionDocument6 paginiTP Métaux1 TractionmariaÎncă nu există evaluări
- TP RDMDocument36 paginiTP RDMHOUSSAME NAIM100% (1)
- Chapitre 1 PDFDocument18 paginiChapitre 1 PDFSoufiane OuassouÎncă nu există evaluări
- TP Traction Ire MateriauxDocument8 paginiTP Traction Ire Materiauxdjdjo1983Încă nu există evaluări
- Présentation AbaqusDocument16 paginiPrésentation AbaqusChikhaouiÎncă nu există evaluări
- 1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Document5 pagini1 - L3-GC-Calcul Des Structures-Cours 1 - Chap 3Tarike Zohir100% (1)
- Travaux Dirigeees de Materiaux CompositesDocument2 paginiTravaux Dirigeees de Materiaux CompositesFrancis Sonkeng100% (2)
- Rapport AcierDocument16 paginiRapport AcierMlle Hanane SghirÎncă nu există evaluări
- Cours3 Choix Des MatériauxDocument46 paginiCours3 Choix Des MatériauxAyoub ID M’barkÎncă nu există evaluări
- Chap2 - Outillages Pour Le Moulage en Sable GeneralitesDocument33 paginiChap2 - Outillages Pour Le Moulage en Sable GeneralitesBouthayna HajjiÎncă nu există evaluări
- Rapport TP MettallurgieDocument13 paginiRapport TP MettallurgieIsmail SamouhÎncă nu există evaluări
- Examen TP 2013-2014Document12 paginiExamen TP 2013-2014Wassim Ben SalahÎncă nu există evaluări
- Le Tenseur Des Contraintes de CauchyDocument59 paginiLe Tenseur Des Contraintes de CauchyKhireddine MimouniÎncă nu există evaluări
- Poudre de Marbre 3Document125 paginiPoudre de Marbre 3غيث الإماراتÎncă nu există evaluări
- Chapitre 3. Caractéristiques Géométriques Des Sections PlanesDocument12 paginiChapitre 3. Caractéristiques Géométriques Des Sections PlanesBakary KeitaÎncă nu există evaluări
- Torsion ....... HalimaDocument10 paginiTorsion ....... HalimaSimo Kbiri AlaouiÎncă nu există evaluări
- Application Diagramme D Quilibre SDMDocument1 paginăApplication Diagramme D Quilibre SDMBø ÑyÎncă nu există evaluări
- Cours de La RDM - AbdelDocument58 paginiCours de La RDM - Abdelpwamamef100% (1)
- Resistance Des MateriauxDocument4 paginiResistance Des MateriauxerganÎncă nu există evaluări
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDe la EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysÎncă nu există evaluări
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueDe la EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueÎncă nu există evaluări
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesDe la EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesÎncă nu există evaluări
- Exotype 48Document2 paginiExotype 48Ahmed NadiÎncă nu există evaluări
- 121 - Ratios Et Efficacité de La MaintenanceDocument5 pagini121 - Ratios Et Efficacité de La MaintenanceAhmed Nadi100% (1)
- Engin de Chantier - WikipédiaDocument5 paginiEngin de Chantier - WikipédiaAhmed NadiÎncă nu există evaluări
- Engin de Chantier - WikipédiaDocument5 paginiEngin de Chantier - WikipédiaAhmed NadiÎncă nu există evaluări
- 123 - 2 - Les Défaillances - Les Causes - ProfDocument12 pagini123 - 2 - Les Défaillances - Les Causes - ProfAhmed Nadi100% (1)
- SLTDocument1 paginăSLTAhmed NadiÎncă nu există evaluări
- Cours Fluidique1Document14 paginiCours Fluidique1zligomanÎncă nu există evaluări
- III HydrostatiqueDocument9 paginiIII HydrostatiqueAhmed NadiÎncă nu există evaluări
- 13 FiabDocument3 pagini13 FiabAhmed NadiÎncă nu există evaluări
- 12 FiabiliteDocument3 pagini12 FiabiliteAhmed NadiÎncă nu există evaluări
- Livret FXGikqDocument6 paginiLivret FXGikqAhmed NadiÎncă nu există evaluări
- Cours Fluidique1Document14 paginiCours Fluidique1zligomanÎncă nu există evaluări
- Msyn PDFDocument34 paginiMsyn PDFbensumbbÎncă nu există evaluări
- Livret FXGikqDocument6 paginiLivret FXGikqAhmed NadiÎncă nu există evaluări
- IMM115-Cours7 9 PDFDocument61 paginiIMM115-Cours7 9 PDFAhmed NadiÎncă nu există evaluări
- Section04 Papier PDFDocument20 paginiSection04 Papier PDFAhmed NadiÎncă nu există evaluări
- Matlab Part 1Document10 paginiMatlab Part 1Najib El GÎncă nu există evaluări
- PDFDocument14 paginiPDFAhmed NadiÎncă nu există evaluări
- Polyc 2ste 1314c PDFDocument66 paginiPolyc 2ste 1314c PDFAhmed Nadi0% (1)
- Cours8 PDFDocument24 paginiCours8 PDFAhmed NadiÎncă nu există evaluări
- Matlab Part 1Document10 paginiMatlab Part 1Najib El GÎncă nu există evaluări
- L3 TD Meca Lagrangienne PDFDocument32 paginiL3 TD Meca Lagrangienne PDFryadhÎncă nu există evaluări
- 3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1Document60 pagini3.dynamique Des Structures 1-SPDDL Equations de Mouvement-1BOUZIANE MessaoudÎncă nu există evaluări
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDocument11 paginiChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaÎncă nu există evaluări
- Chapitre 01Document16 paginiChapitre 01Dabou AbderaoufÎncă nu există evaluări
- Cinematique Des Robots Series PDFDocument49 paginiCinematique Des Robots Series PDFspeedov73Încă nu există evaluări
- Exercice Schema CinematiqueDocument5 paginiExercice Schema CinematiqueNadia SahliÎncă nu există evaluări
- Cours Les Liaisons Entre SolidesDocument8 paginiCours Les Liaisons Entre SolidesramziÎncă nu există evaluări
- Modélisation Des Systèmes de SolidesDocument17 paginiModélisation Des Systèmes de SolidesAbdelali YacoubiÎncă nu există evaluări
- Contarainte D'antérioritéDocument16 paginiContarainte D'antérioritéMajed NesrineÎncă nu există evaluări
- La Méthodologie Des Éléments Finis Appliquée Àun Problème de Statique PDFDocument8 paginiLa Méthodologie Des Éléments Finis Appliquée Àun Problème de Statique PDFHakimHadjabhakimÎncă nu există evaluări
- Physique Résumé Du Cours en Fiches MPSI-MPDocument176 paginiPhysique Résumé Du Cours en Fiches MPSI-MPyassino89100% (22)
- Exercice 1 TYMOLDocument81 paginiExercice 1 TYMOLJopeth YoussefÎncă nu există evaluări
- Mecaniquei 1Document206 paginiMecaniquei 1Imad BoudjemadiÎncă nu există evaluări
- Cotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsDocument81 paginiCotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsomatrÎncă nu există evaluări
- Les Liaisons MécaniqueDocument12 paginiLes Liaisons Mécaniquemourad mouradÎncă nu există evaluări
- Theorie Des MecanismesDocument16 paginiTheorie Des MecanismesMeddour WassimÎncă nu există evaluări
- Cours MecaniqueDocument26 paginiCours MecaniqueMeryem JabraneÎncă nu există evaluări
- 1 - Cours Modelisation Des MecanismesDocument30 pagini1 - Cours Modelisation Des Mecanismesline caulfutyÎncă nu există evaluări
- Robot ParallelDocument123 paginiRobot ParalleldardhamzaÎncă nu există evaluări
- Exercice LiaisonDocument2 paginiExercice LiaisonMed Aymen BensalemÎncă nu există evaluări
- COURS Conception Systeme MécaniqueDocument22 paginiCOURS Conception Systeme MécaniqueAymen KhalfaouiÎncă nu există evaluări
- Laboratoire 1-à Tude CinématiqueDocument9 paginiLaboratoire 1-à Tude CinématiqueRita FrejÎncă nu există evaluări
- Chapitre 1 - Liaisons Mécaniques - Partie 1Document4 paginiChapitre 1 - Liaisons Mécaniques - Partie 1Loic ReyesÎncă nu există evaluări
- Schéma Cinématique - 2020Document6 paginiSchéma Cinématique - 2020Mohsen Laabidi100% (1)
- Tp1 Catia Cinematique CpiDocument22 paginiTp1 Catia Cinematique CpiIngénierie AutomobileÎncă nu există evaluări
- Technologie de Construction 1Document106 paginiTechnologie de Construction 1boukhriss mokhless100% (2)
- Etude Cinematique Du Etude Cinematique Du Cric Electrique Cric ElectriqueDocument4 paginiEtude Cinematique Du Etude Cinematique Du Cric Electrique Cric Electriquemmnlbrice67% (3)
- Liaisons MécaniquesDocument4 paginiLiaisons MécaniquesRhô ThalesÎncă nu există evaluări
- Rappels de MécaniqueDocument41 paginiRappels de MécaniqueBoud Elhassan0% (1)