S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Otomatik Kontrol Hakan YazıcıDocument27 paginiOtomatik Kontrol Hakan YazıcıMücahit Ezel0% (1)
- (A305) Otomatik Kontrol Ders Notu (Slayt)Document27 pagini(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- Shafts and Associated Parts: Prof. Dr. Özgen Ümit ÇolakDocument14 paginiShafts and Associated Parts: Prof. Dr. Özgen Ümit ÇolakMücahit EzelÎncă nu există evaluări
- Machine Elements Ii Homework 3: Due: May 23thDocument1 paginăMachine Elements Ii Homework 3: Due: May 23thMücahit EzelÎncă nu există evaluări
- Makel HW1Document1 paginăMakel HW1Mücahit EzelÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Sjoblom, J. - Handbook of Emulsion Technology PDFDocument731 paginiSjoblom, J. - Handbook of Emulsion Technology PDFdcharlies92% (13)
- Internship Report May 2016Document11 paginiInternship Report May 2016Rupini RagaviahÎncă nu există evaluări
- SOP 829 - 032 Check-Reset KEMS, CrownomaticDocument2 paginiSOP 829 - 032 Check-Reset KEMS, CrownomaticAnonymous XbmoAFtIÎncă nu există evaluări
- GMP Male BearingDocument3 paginiGMP Male BearingMahdi HajizadehÎncă nu există evaluări
- Geotechnical Engineering 1 (RMIT) Course RevisionDocument53 paginiGeotechnical Engineering 1 (RMIT) Course RevisionSaint123Încă nu există evaluări
- JNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIDocument2 paginiJNTUA B Tech 2018 1 2 May R15 ECE 15A54201 Mathematics IIMRUDULA KULAKARNIÎncă nu există evaluări
- Huawei: Quidway Full Series Ethernet Routing SwitchesDocument90 paginiHuawei: Quidway Full Series Ethernet Routing SwitchesWalter Aguiar0% (1)
- Schneider EngineeringDocument1 paginăSchneider EngineeringT.J. MayesÎncă nu există evaluări
- 06-901 Keyed Input SwitchesDocument4 pagini06-901 Keyed Input Switchesmajed al.madhajiÎncă nu există evaluări
- RequirementsDocument18 paginiRequirementsmpedraza-1Încă nu există evaluări
- Applying Six Sigma at 3MDocument13 paginiApplying Six Sigma at 3MdchÎncă nu există evaluări
- Ex-Cell XR2750 Pressure Washer Operation ManualDocument16 paginiEx-Cell XR2750 Pressure Washer Operation Manualj_wilson85Încă nu există evaluări
- Ecc Mech Sharq 22 016 Rev 01Document6 paginiEcc Mech Sharq 22 016 Rev 01Muthu SaravananÎncă nu există evaluări
- OTE Maintenance Inspection For Grinding Eng WebDocument2 paginiOTE Maintenance Inspection For Grinding Eng WebjadetorresÎncă nu există evaluări
- Defects in Welds: PorosityDocument40 paginiDefects in Welds: PorosityrohanÎncă nu există evaluări
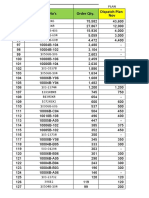
- Order Qty Vs Dispatch Plan - 04 11 20Document13 paginiOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPÎncă nu există evaluări
- Comparative Study of Nylon and PVC Fluidized Bed Coating On Mild SteelDocument12 paginiComparative Study of Nylon and PVC Fluidized Bed Coating On Mild SteelWaqqas ChaudhryÎncă nu există evaluări
- Jerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransDocument1 paginăJerry Hill's Letter To Bijan Sartipi, Director, District 4 CaltransSabrina BrennanÎncă nu există evaluări
- Educational Solutions From Schneider ElectricDocument164 paginiEducational Solutions From Schneider ElectricfaneeeeeeÎncă nu există evaluări
- Lecure Two. ReactorsDocument56 paginiLecure Two. ReactorsSophia WambuiÎncă nu există evaluări
- Diet Coke & Mentos Geyser Lab 2011-2012Document4 paginiDiet Coke & Mentos Geyser Lab 2011-2012Frederick LoganÎncă nu există evaluări
- Project AgreementDocument6 paginiProject AgreementRowin DizonÎncă nu există evaluări
- IRF350Document7 paginiIRF350sanniviÎncă nu există evaluări
- GM Passlock II SystemDocument14 paginiGM Passlock II Systemalmia tronicsÎncă nu există evaluări
- 6-C-RIIMPO301E - Conduct Hydraulic Excavator Operations - Learner Guide - V 1.1 02122019 PDFDocument31 pagini6-C-RIIMPO301E - Conduct Hydraulic Excavator Operations - Learner Guide - V 1.1 02122019 PDFOwen PerrinÎncă nu există evaluări
- Steel Top Hats Battens Capacitytables Product Technical ManualDocument16 paginiSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaÎncă nu există evaluări
- Compact 40/25Document58 paginiCompact 40/25znim04Încă nu există evaluări
- Ism CodeDocument9 paginiIsm CodePraneel KurhadeÎncă nu există evaluări
- Hot Air Oven Or Dry Oven: نﺎﺸﻄﻋ ﻦﻴﺴﺣ ﻲﻠﻋ G @a - nv19Document2 paginiHot Air Oven Or Dry Oven: نﺎﺸﻄﻋ ﻦﻴﺴﺣ ﻲﻠﻋ G @a - nv19حسين محمد مطرود كاظمÎncă nu există evaluări
- Comparative Tracking Index of Electrical Insulating MaterialsDocument6 paginiComparative Tracking Index of Electrical Insulating MaterialsAbu Anas M.SalaheldinÎncă nu există evaluări