S-ar putea să vă placă și
- Mechanical Method For Soil CompactionDocument63 paginiMechanical Method For Soil Compactionhawk_shahin100% (2)
- Soil CompactionDocument18 paginiSoil CompactionLiza SyafitriÎncă nu există evaluări
- Pressuremeter Testing: Methods and InterpretationDe la EverandPressuremeter Testing: Methods and InterpretationEvaluare: 5 din 5 stele5/5 (2)
- Characterisation of Soil ESCI 16-2-2012Document102 paginiCharacterisation of Soil ESCI 16-2-2012Divya Tadepalli100% (1)
- Geotechnical Engineering: Unsaturated and Saturated SoilsDe la EverandGeotechnical Engineering: Unsaturated and Saturated SoilsEvaluare: 5 din 5 stele5/5 (1)
- WisDOT WHRP Project 0092 08 11 Brief PDFDocument2 paginiWisDOT WHRP Project 0092 08 11 Brief PDFroopchandanÎncă nu există evaluări
- CompactionDocument28 paginiCompactionsitimarlinnachuÎncă nu există evaluări
- Ce-481 Soil Mechanics II CompactionDocument36 paginiCe-481 Soil Mechanics II Compactiondaniel bulÎncă nu există evaluări
- Longwall Mining at Shallow Depth of Cover in IndiaDe la EverandLongwall Mining at Shallow Depth of Cover in IndiaÎncă nu există evaluări
- Group 5 - Field CompactionDocument29 paginiGroup 5 - Field CompactionAllan VillaverdeÎncă nu există evaluări
- Surface Subsidence Engineering: Theory and PracticeDe la EverandSurface Subsidence Engineering: Theory and PracticeÎncă nu există evaluări
- Comprehensive (V3.0)Document93 paginiComprehensive (V3.0)diandri_ditraÎncă nu există evaluări
- Design of Piles Under Cyclic Loading: SOLCYP RecommendationsDe la EverandDesign of Piles Under Cyclic Loading: SOLCYP RecommendationsAlain PuechÎncă nu există evaluări
- Study On Compaction EquipmentsDocument23 paginiStudy On Compaction EquipmentsNaveen NatarajanÎncă nu există evaluări
- SOIL COMPACTION AND GRADING EQUIPMENTDocument59 paginiSOIL COMPACTION AND GRADING EQUIPMENTweston chegeÎncă nu există evaluări
- Compaction control field testing methodsDocument11 paginiCompaction control field testing methodsRaj BakhtaniÎncă nu există evaluări
- 4.0 Unbound MaterialsDocument56 pagini4.0 Unbound MaterialsJeffjr VallenteÎncă nu există evaluări
- Fmcet: Ground ImprovementDocument29 paginiFmcet: Ground ImprovementVijay KumarÎncă nu există evaluări
- Subgrade Material Classification and Compaction MethodsDocument50 paginiSubgrade Material Classification and Compaction MethodsEmm Zeeshan DanishÎncă nu există evaluări
- CompactionDocument64 paginiCompactionRamesh Konakalla100% (1)
- Comp Action & Earth WorkDocument72 paginiComp Action & Earth WorkThota RevanthÎncă nu există evaluări
- Soil Compaction - UKM - Joint LectureDocument23 paginiSoil Compaction - UKM - Joint LectureINDRAN A/L SELVAMÎncă nu există evaluări
- Lab Equipment NameDocument44 paginiLab Equipment Namepawan bhattaraiÎncă nu există evaluări
- DEEP DYNAMIC COMPACTION TECHNIQUEDocument50 paginiDEEP DYNAMIC COMPACTION TECHNIQUESafdar AliÎncă nu există evaluări
- TL PresentationDocument141 paginiTL Presentations.thrinadhraoÎncă nu există evaluări
- Ground Improvement Techniques for Problem SoilsDocument82 paginiGround Improvement Techniques for Problem SoilsNadim527Încă nu există evaluări
- Ground Improvement Techniques ME 3rd SemDocument57 paginiGround Improvement Techniques ME 3rd SemSojil Jain86% (7)
- 2011 Pdca Additional Design ConsiderationsDocument43 pagini2011 Pdca Additional Design ConsiderationsKay Chan SothearaÎncă nu există evaluări
- Engineering Ground Modification AssignmentDocument9 paginiEngineering Ground Modification AssignmentHimanshu RanaÎncă nu există evaluări
- Ground Improvement Techniques ME 3rd Sem PPT FileDocument57 paginiGround Improvement Techniques ME 3rd Sem PPT FileArham Sheikh100% (6)
- A Comparison of Density-Based and Modulus-Based - MeehanDocument15 paginiA Comparison of Density-Based and Modulus-Based - Meehanluz marinaÎncă nu există evaluări
- Part 1 - Soil CompactionDocument38 paginiPart 1 - Soil CompactionAlex Ferreira80% (5)
- WisDOT Lift Thickness Research Evaluates Optimal Embankment Construction LimitsDocument2 paginiWisDOT Lift Thickness Research Evaluates Optimal Embankment Construction LimitsgadÎncă nu există evaluări
- Note5 SoilCompactionDocument30 paginiNote5 SoilCompactionDerilÎncă nu există evaluări
- CEE 434 Soil Compaction and Improvement TechniquesDocument33 paginiCEE 434 Soil Compaction and Improvement Techniqueskarthikeyan PÎncă nu există evaluări
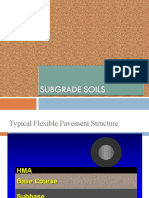
- Typical Flexible Pavement Structure InvestigationDocument44 paginiTypical Flexible Pavement Structure InvestigationAmanu WorkuÎncă nu există evaluări
- 1 BAA3513 Site InvestigationDocument32 pagini1 BAA3513 Site Investigationاحمد يوسفÎncă nu există evaluări
- Journal 10 PDFDocument6 paginiJournal 10 PDFRuzengulalebih ZEta's-ListikÎncă nu există evaluări
- Soil Mechanics Project AnalysisThis title "TITLE Soil Mechanics Project AnalysisDocument13 paginiSoil Mechanics Project AnalysisThis title "TITLE Soil Mechanics Project AnalysishamzahayatÎncă nu există evaluări
- 2.06 Soil Mechanical TestsDocument12 pagini2.06 Soil Mechanical TestsSamuel TREKU-ABRAHAMSÎncă nu există evaluări
- GRLWEAP Wave Equation Pile Driving AnalysisDocument28 paginiGRLWEAP Wave Equation Pile Driving AnalysisBolarinwa80% (5)
- InSituTesting WebsiteDocument38 paginiInSituTesting Websiteag_007Încă nu există evaluări
- Ground Improvement TechniquesDocument74 paginiGround Improvement TechniquesNishanthan RavinÎncă nu există evaluări
- Soil Compaction CLASS NOTESDocument14 paginiSoil Compaction CLASS NOTESkkcollins395Încă nu există evaluări
- CompactionDocument24 paginiCompactionzubair-scribdÎncă nu există evaluări
- Analysis and Execution of Road Work - PPTDocument41 paginiAnalysis and Execution of Road Work - PPTengrarzooÎncă nu există evaluări
- Mechanical ModificationDocument5 paginiMechanical ModificationShantnu RanaÎncă nu există evaluări
- Assignment No-20Document22 paginiAssignment No-20Saurabh ManeÎncă nu există evaluări
- Compacting and FinishingDocument48 paginiCompacting and FinishingLhaie Balasbas100% (1)
- Chapter3 Soilexploration Feb2020Document54 paginiChapter3 Soilexploration Feb2020Livineshwaren BalasundaramÎncă nu există evaluări
- Vane Shear TestDocument14 paginiVane Shear TestJohn HowardÎncă nu există evaluări
- PavementsDocument67 paginiPavementscblerÎncă nu există evaluări
- Cone Penetration Test (CPT) ExplainedDocument14 paginiCone Penetration Test (CPT) Explainedgabriel chinechenduÎncă nu există evaluări
- Skid ResistanceDocument5 paginiSkid ResistanceFiaz GujjarÎncă nu există evaluări
- Chapter 2 Lecture - Mechanical Analysis of Soil ContentDocument38 paginiChapter 2 Lecture - Mechanical Analysis of Soil ContentnabtorÎncă nu există evaluări
- Design and Installation Guidelines for Erosion ControlDocument15 paginiDesign and Installation Guidelines for Erosion Controlmike DonÎncă nu există evaluări
- Isrm NJ 1 1Document68 paginiIsrm NJ 1 1gan6043Încă nu există evaluări
- Re500 With Hit-V Has RodDocument14 paginiRe500 With Hit-V Has Rodgan6043Încă nu există evaluări
- SAFE VerificationDocument364 paginiSAFE Verificationgan6043Încă nu există evaluări
- SAFE VerificationDocument364 paginiSAFE Verificationgan6043Încă nu există evaluări
- Nondestructive Testing On ConcreteDocument8 paginiNondestructive Testing On Concretegan6043Încă nu există evaluări
- Intro To FEMDocument87 paginiIntro To FEMgan6043100% (1)
- Pile Capacity Design (Benoi) - Rev2Document1 paginăPile Capacity Design (Benoi) - Rev2gan6043Încă nu există evaluări
- Islander Individual FamilyDocument2 paginiIslander Individual Familygan6043Încă nu există evaluări
- Consultant ListDocument2 paginiConsultant Listgan604325% (8)
- Recommendations For The Seismic Design of High-Rise BuildingsDocument24 paginiRecommendations For The Seismic Design of High-Rise Buildingshammads88100% (1)
- 12.elastic ConstantsDocument18 pagini12.elastic ConstantsaderancÎncă nu există evaluări
- Geotechnical Design and Stability Analysis of Retaining StructuresDocument15 paginiGeotechnical Design and Stability Analysis of Retaining StructuresSanko Kosan100% (1)
- Chemical Bonding II - VSEPR ModelDocument23 paginiChemical Bonding II - VSEPR ModelYokaris JTÎncă nu există evaluări
- Modern Physics OverviewDocument32 paginiModern Physics OverviewKay LagunaÎncă nu există evaluări
- ESO Annual Report 2016Document126 paginiESO Annual Report 2016European Southern ObservatoryÎncă nu există evaluări
- Previous Hse Questions and Answers of The Chapter "Structure of Atom"Document12 paginiPrevious Hse Questions and Answers of The Chapter "Structure of Atom"YADUKRISHNAN K NAIRÎncă nu există evaluări
- Ideal Gas CyclesDocument8 paginiIdeal Gas CyclesMLNDG boysÎncă nu există evaluări
- Photoelectric Effect: Jump To Navigation Jump To SearchDocument10 paginiPhotoelectric Effect: Jump To Navigation Jump To SearchSrynnEÎncă nu există evaluări
- SF6 Circuit Breakers AdvantagesDocument4 paginiSF6 Circuit Breakers Advantagessekhar_ntpcÎncă nu există evaluări
- Task #5 (Hermo)Document4 paginiTask #5 (Hermo)KATHLEEN MAE HERMOÎncă nu există evaluări
- TriodeDocument7 paginiTriodeAnonymous E4Rbo2sÎncă nu există evaluări
- MCV4U CH 8 Nelson SolutionsDocument29 paginiMCV4U CH 8 Nelson SolutionsStephanieÎncă nu există evaluări
- MAGMA How To UseDocument113 paginiMAGMA How To Usepurushothaman1234566Încă nu există evaluări
- Dynamic Analysis of FDN BlockDocument26 paginiDynamic Analysis of FDN BlockMayuresh KudveÎncă nu există evaluări
- 6 - Francis Turbine PDFDocument39 pagini6 - Francis Turbine PDFMohamed YaserÎncă nu există evaluări
- MECH 344/M Machine Element DesignDocument75 paginiMECH 344/M Machine Element DesignlitonÎncă nu există evaluări
- MicrobiologyDocument82 paginiMicrobiologyAbhishek SinghÎncă nu există evaluări
- Heating and CoolingDocument45 paginiHeating and CoolingGillianne AndradeÎncă nu există evaluări
- Net Positive Suction HeadDocument16 paginiNet Positive Suction HeadpandiangvÎncă nu există evaluări
- To Estimate The Charge Induced On Each of The Two Identical Stryo Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb'S LawDocument8 paginiTo Estimate The Charge Induced On Each of The Two Identical Stryo Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb'S LawAryan BudhathokiÎncă nu există evaluări
- Mechanical Vibrations Assignment SolutionsDocument5 paginiMechanical Vibrations Assignment SolutionskamalÎncă nu există evaluări
- 1415 Phy S5 Term1 Formtest1Document11 pagini1415 Phy S5 Term1 Formtest1黃賡浩Încă nu există evaluări
- M.Tech Seminar Report GuidelinesDocument7 paginiM.Tech Seminar Report GuidelinesAnoop MathewÎncă nu există evaluări
- CLUTCH TORQUE CALCULATIONDocument3 paginiCLUTCH TORQUE CALCULATIONChristian ArloÎncă nu există evaluări
- Projectile MotionDocument15 paginiProjectile MotionAndi Rafika Dwi Rachma100% (1)
- Structural Analysis of DomesDocument10 paginiStructural Analysis of DomesThotho Kennedy100% (2)
- Preparation and Characterization of Doxorubicin-Containing Liposomes: I. Influence of Liposome Charge and PH of Hydration Medium On Loading Capacity and Particle SizeDocument14 paginiPreparation and Characterization of Doxorubicin-Containing Liposomes: I. Influence of Liposome Charge and PH of Hydration Medium On Loading Capacity and Particle SizeSanelaÎncă nu există evaluări
- Commercial Softener Specifications and Flow RatesDocument1 paginăCommercial Softener Specifications and Flow Ratesrhusseinpos4765Încă nu există evaluări
- CH04 - Heat Exchanger - AmanDocument104 paginiCH04 - Heat Exchanger - AmanNabilah MustafaÎncă nu există evaluări
- Terminal Report OJT MTTDocument4 paginiTerminal Report OJT MTTJun MichaelÎncă nu există evaluări