S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- How To Think Like A Computer Scientist Using Python 3Document421 paginiHow To Think Like A Computer Scientist Using Python 3Subhash Mantha75% (4)
- GUI Programming in PythonDocument15 paginiGUI Programming in Pythonvikas_2Încă nu există evaluări
- Create Posts Table PHPDocument1 paginăCreate Posts Table PHPbaiqunyÎncă nu există evaluări
- Create Comments Table PHPDocument1 paginăCreate Comments Table PHPbaiqunyÎncă nu există evaluări
- Please Note That Rendering An Animation Takes A Lot of Time!!Document2 paginiPlease Note That Rendering An Animation Takes A Lot of Time!!Venerio Giuseppe AnarduÎncă nu există evaluări
- MengatasiErrorMigration CRUD LaravelDocument1 paginăMengatasiErrorMigration CRUD LaravelbaiqunyÎncă nu există evaluări
- Create Categories Table PHPDocument1 paginăCreate Categories Table PHPbaiqunyÎncă nu există evaluări
- RFID SystemDocument9 paginiRFID SystembaiqunyÎncă nu există evaluări
- Datasheet StepperDocument9 paginiDatasheet StepperMuhammad Nasrudin LatiefÎncă nu există evaluări
- Pid SimulationDocument9 paginiPid SimulationbaiqunyÎncă nu există evaluări
- ArduinoBluethoth AndroidStudioDocument13 paginiArduinoBluethoth AndroidStudiobaiqunyÎncă nu există evaluări
- Android Application For Controling LEDDocument6 paginiAndroid Application For Controling LEDPedro F de PaulaÎncă nu există evaluări
- Arduino - WindowsDocument6 paginiArduino - WindowsbaiqunyÎncă nu există evaluări
- Adafruit Arduino Lesson 16 Stepper MotorsDocument10 paginiAdafruit Arduino Lesson 16 Stepper MotorsRacielMCÎncă nu există evaluări
- Principles of Radar System Design - Chapter One Introduction To RadarDocument21 paginiPrinciples of Radar System Design - Chapter One Introduction To Radarcurtis_f_leeÎncă nu există evaluări
- ATmega 128 RFA1Document13 paginiATmega 128 RFA1baiqunyÎncă nu există evaluări
- Denah Unsyiah Citra Radar2Document1 paginăDenah Unsyiah Citra Radar2baiqunyÎncă nu există evaluări
- Amplitude ModulationDocument7 paginiAmplitude ModulationbaiqunyÎncă nu există evaluări
- Instrument Landing SystemDocument4 paginiInstrument Landing Systemamj665Încă nu există evaluări
- C 03Document35 paginiC 03baiqunyÎncă nu există evaluări
- Hosts UmbrellaDocument1 paginăHosts UmbrellaFabsor SoralÎncă nu există evaluări
- Denah Unsyiah Citra Radar2Document1 paginăDenah Unsyiah Citra Radar2baiqunyÎncă nu există evaluări
- Hosts UmbrellaDocument1 paginăHosts UmbrellaFabsor SoralÎncă nu există evaluări
- 12 900058 000 Instruction SheetDocument8 pagini12 900058 000 Instruction SheetbaiqunyÎncă nu există evaluări
- Higher Algebra - Hall & KnightDocument593 paginiHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Cross-Correlation Cross-CorrelationDocument2 paginiCross-Correlation Cross-CorrelationbaiqunyÎncă nu există evaluări
- Business Plan For The Small Construction FirmDocument31 paginiBusiness Plan For The Small Construction FirmAlvie Borromeo Valiente100% (1)
- Gambar KomponenDocument2 paginiGambar KomponenbaiqunyÎncă nu există evaluări
- Gambar KomponenDocument2 paginiGambar KomponenbaiqunyÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Thesis Statement On Corporate Social ResponsibilityDocument5 paginiThesis Statement On Corporate Social Responsibilitypjrozhiig100% (2)
- Learning Spanish - 1dDocument23 paginiLearning Spanish - 1dChima C. Ugwuegbu100% (1)
- Excel Lesson 5 QuizDocument5 paginiExcel Lesson 5 Quizdeep72Încă nu există evaluări
- July 2014Document56 paginiJuly 2014Gas, Oil & Mining Contractor MagazineÎncă nu există evaluări
- Advantages of The CapmDocument3 paginiAdvantages of The Capmdeeparaghu6Încă nu există evaluări
- Mastering American EnglishDocument120 paginiMastering American Englishmarharnwe80% (10)
- NHD Process PaperDocument2 paginiNHD Process Paperapi-122116050Încă nu există evaluări
- Policy Implementation NotesDocument17 paginiPolicy Implementation NoteswubeÎncă nu există evaluări
- 3-CHAPTER-1 - Edited v1Document32 pagini3-CHAPTER-1 - Edited v1Michael Jaye RiblezaÎncă nu există evaluări
- Madam Shazia PaperDocument14 paginiMadam Shazia PaperpervaizhejÎncă nu există evaluări
- ETSI EG 202 057-4 Speech Processing - Transmission and Quality Aspects (STQ) - Umbrales de CalidaDocument34 paginiETSI EG 202 057-4 Speech Processing - Transmission and Quality Aspects (STQ) - Umbrales de Calidat3rdacÎncă nu există evaluări
- Lab Activity 5Document5 paginiLab Activity 5Jasmin CeciliaÎncă nu există evaluări
- Standalone Financial Results, Limited Review Report For December 31, 2016 (Result)Document4 paginiStandalone Financial Results, Limited Review Report For December 31, 2016 (Result)Shyam SunderÎncă nu există evaluări
- Theory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)Document15 paginiTheory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)International Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Study of Employees Performance Appraisal System in Hindustan Unilever LimitedDocument9 paginiStudy of Employees Performance Appraisal System in Hindustan Unilever LimitedSimranjitÎncă nu există evaluări
- 2015 Grade 4 English HL Test MemoDocument5 pagini2015 Grade 4 English HL Test MemorosinaÎncă nu există evaluări
- Project Report On HeritageDocument39 paginiProject Report On HeritageBALA YOGESH YANDAMURIÎncă nu există evaluări
- PC300-8 New ModelDocument22 paginiPC300-8 New Modeljacklyn ade putra100% (2)
- Recognition AND AmbivalenceDocument350 paginiRecognition AND AmbivalenceFrederic ValÎncă nu există evaluări
- GSP AllDocument8 paginiGSP AllAleksandar DjordjevicÎncă nu există evaluări
- Agile in ISO 9001 - How To Integrate Agile Processes Into Your Quality Management System-Springer (2023)Document67 paginiAgile in ISO 9001 - How To Integrate Agile Processes Into Your Quality Management System-Springer (2023)j.paulo.mcÎncă nu există evaluări
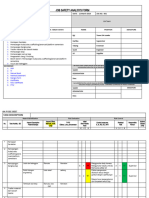
- JSA FormDocument4 paginiJSA Formfinjho839Încă nu există evaluări
- Brianna Pratt - l3stl1 - Dsu Lesson Plan TemplateDocument5 paginiBrianna Pratt - l3stl1 - Dsu Lesson Plan Templateapi-593886164Încă nu există evaluări
- Nodal Analysis Collection 2Document21 paginiNodal Analysis Collection 2Manoj ManmathanÎncă nu există evaluări
- Piston Master PumpsDocument14 paginiPiston Master PumpsMauricio Ariel H. OrellanaÎncă nu există evaluări
- Aits 2122 PT I Jeea 2022 TD Paper 2 SolDocument14 paginiAits 2122 PT I Jeea 2022 TD Paper 2 SolSoumodeep NayakÎncă nu există evaluări
- How Do I Predict Event Timing Saturn Nakshatra PDFDocument5 paginiHow Do I Predict Event Timing Saturn Nakshatra PDFpiyushÎncă nu există evaluări
- Embedded System Lab ManualDocument67 paginiEmbedded System Lab Manualsaim100% (1)
- FBISE Grade 10 Biology Worksheet#1Document2 paginiFBISE Grade 10 Biology Worksheet#1Moaz AhmedÎncă nu există evaluări
- ASHRAE Final Operating Room 508 PDFDocument13 paginiASHRAE Final Operating Room 508 PDFSilisteanu AndreiÎncă nu există evaluări