S-ar putea să vă placă și
- Formbio PDFDocument2 paginiFormbio PDFNoureddine BounaslaÎncă nu există evaluări
- 13 PisanoDocument124 pagini13 PisanoNoureddine BounaslaÎncă nu există evaluări
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 paginiAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaÎncă nu există evaluări
- Flux 2D TutorialDocument42 paginiFlux 2D Tutorialboldogsz88Încă nu există evaluări
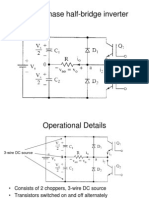
- Single-Phase Half-Bridge InverterDocument29 paginiSingle-Phase Half-Bridge InverterNoureddine BounaslaÎncă nu există evaluări
- 1WCE2009 pp435-440Document6 pagini1WCE2009 pp435-440Noureddine BounaslaÎncă nu există evaluări
- 123 Paper V MihovDocument6 pagini123 Paper V MihovNoureddine BounaslaÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Basicthermo Compiled VvbongaleDocument66 paginiBasicthermo Compiled Vvbongalenanaiahbn100% (1)
- Smude Mba Solved Assignments of MB0048Document2 paginiSmude Mba Solved Assignments of MB0048SolvedSmuAssignmentsÎncă nu există evaluări
- Control Engineering - Unit 4 - Week 1Document5 paginiControl Engineering - Unit 4 - Week 1Joyce GeorgeÎncă nu există evaluări
- По названиямDocument2 paginiПо названиямMiguel SaavedraÎncă nu există evaluări
- Software Validation BookDocument102 paginiSoftware Validation Bookbig_ninja600100% (9)
- QB A4 DSPDocument27 paginiQB A4 DSPDevie MohanÎncă nu există evaluări
- 21458.basic and Advanced Regulatory Control System Design and Application PDFDocument390 pagini21458.basic and Advanced Regulatory Control System Design and Application PDFMuktoAhmed100% (3)
- Tutorial 09 - QuestionsDocument2 paginiTutorial 09 - QuestionsVỹ PhạmÎncă nu există evaluări
- Approaches To AIDocument7 paginiApproaches To AIA K0% (1)
- Statistical Process ControlDocument24 paginiStatistical Process ControlAnoopa Narayan100% (1)
- IntegerDocument54 paginiIntegerDhruti GadhiyaÎncă nu există evaluări
- Basic Management Models and Theories Associated With Motivation and Leadership and Be Able To Apply Them To Practical Situations and ProblemsDocument18 paginiBasic Management Models and Theories Associated With Motivation and Leadership and Be Able To Apply Them To Practical Situations and Problemsram_babu_59100% (1)
- AP Physics - : ThermodynamicsDocument7 paginiAP Physics - : Thermodynamicsf3er3Încă nu există evaluări
- CS361 Lec 03Document26 paginiCS361 Lec 03Omar AhmedÎncă nu există evaluări
- Physical Chemistry Reviewer - Laws of ThermodynamicsDocument2 paginiPhysical Chemistry Reviewer - Laws of ThermodynamicsJerome SadudaquilÎncă nu există evaluări
- Functional SafetyDocument9 paginiFunctional SafetyAhmed GhariebÎncă nu există evaluări
- Assignment 1-Strategic Systems ThinkingDocument21 paginiAssignment 1-Strategic Systems Thinkingkiariesw50% (2)
- Lab5 PDFDocument7 paginiLab5 PDFThangaGiri BaskaranÎncă nu există evaluări
- Rsquare ProfileDocument22 paginiRsquare ProfilenandhakumarÎncă nu există evaluări
- SDLCDocument19 paginiSDLCkawawokyÎncă nu există evaluări
- Me2202 Engineering Thermodynamics - Uq - May June 2016Document4 paginiMe2202 Engineering Thermodynamics - Uq - May June 2016BIBIN CHIDAMBARANATHANÎncă nu există evaluări
- Questions & Answers On Discrete Time Signals and SystemsDocument26 paginiQuestions & Answers On Discrete Time Signals and Systemskibrom atsbhaÎncă nu există evaluări
- Multidisciplinary System Design Optimization (MSDO)Document33 paginiMultidisciplinary System Design Optimization (MSDO)Zobair Ibn AwalÎncă nu există evaluări
- International Business - Economics and Anthropology, Theory and Method (PDFDrive)Document308 paginiInternational Business - Economics and Anthropology, Theory and Method (PDFDrive)GOSHUÎncă nu există evaluări
- Iso 42010 PDFDocument55 paginiIso 42010 PDFLeon KennedyÎncă nu există evaluări
- Directions of Thermodynamic Processes: Thermodynamic Processes in Nature Are Directional and They Are IrreversibleDocument25 paginiDirections of Thermodynamic Processes: Thermodynamic Processes in Nature Are Directional and They Are IrreversibleSam BrownÎncă nu există evaluări
- Advanced DSP Final ExamDocument1 paginăAdvanced DSP Final ExamAhmed Samir MohamedÎncă nu există evaluări
- ETD Assignment Presentation 21Document2 paginiETD Assignment Presentation 21shiva snekhaÎncă nu există evaluări
- Using The Min-Max Method To Solve Multiobjective Optimization Problems With Genetic AlgorithmsDocument2 paginiUsing The Min-Max Method To Solve Multiobjective Optimization Problems With Genetic AlgorithmsNguyen VinhÎncă nu există evaluări
- Simulation Propylene PropaneDocument6 paginiSimulation Propylene PropaneFabrizzio Renzo Chanco CapuchoÎncă nu există evaluări