S-ar putea să vă placă și
- AE022 Electronica DigitalDocument12 paginiAE022 Electronica DigitalescamillaÎncă nu există evaluări
- IS-341 Sistemas Digitales y Arquitectura de Computadoras PDFDocument6 paginiIS-341 Sistemas Digitales y Arquitectura de Computadoras PDFEMMA ZULIOVA VELARDE FERNANDEZÎncă nu există evaluări
- FG O ITIC-2010-225 Tecnologias InalambricasDocument9 paginiFG O ITIC-2010-225 Tecnologias InalambricasGustavo Fuentes LopezÎncă nu există evaluări
- AE-22 Electronica DigitalDocument9 paginiAE-22 Electronica DigitalJhhozeé RmrzÎncă nu există evaluări
- Tid1008 IticDocument10 paginiTid1008 IticsttepencambiandoÎncă nu există evaluări
- Syllabus Arquitectura de ComputadorasDocument5 paginiSyllabus Arquitectura de Computadorasjaime_parada3097Încă nu există evaluări
- Cibernética y Computación I-IIDocument18 paginiCibernética y Computación I-IIRaymundo LiraÎncă nu există evaluări
- 1 (4 Files Merged)Document4 pagini1 (4 Files Merged)Miguel OrdoñezÎncă nu există evaluări
- Electronica Digital X CompetenciasDocument15 paginiElectronica Digital X CompetenciasDelfino OlivaresÎncă nu există evaluări
- Controladores Lógicos ProgramablesDocument10 paginiControladores Lógicos ProgramablestlapetlaliÎncă nu există evaluări
- Electrónica Digital para el Control de Sistemas MecatrónicosDocument6 paginiElectrónica Digital para el Control de Sistemas MecatrónicosPepeAndresÎncă nu există evaluări
- Silabo CIB12Document5 paginiSilabo CIB12DavidÎncă nu există evaluări
- Micro y Nano Electrónica PDFDocument5 paginiMicro y Nano Electrónica PDFjairo muro hernandezÎncă nu există evaluări
- Arquitectura de Computadoras (Temario)Document9 paginiArquitectura de Computadoras (Temario)Don CarloÎncă nu există evaluări
- Microcurriculo ElectrónicaDocument9 paginiMicrocurriculo ElectrónicaEdgar David Monroy JordanÎncă nu există evaluări
- Silabo Administracion Centros de ComputoDocument7 paginiSilabo Administracion Centros de ComputoAlid La SombraÎncă nu există evaluări
- FA IMCT 2010 229 MicrocontroladoresDocument16 paginiFA IMCT 2010 229 MicrocontroladoresgiorgioluiguiÎncă nu există evaluări
- Laboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónDe la EverandLaboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónEvaluare: 4 din 5 stele4/5 (4)
- UTN FRSF Técnicas Digitales I Plan 2008Document0 paginiUTN FRSF Técnicas Digitales I Plan 2008William RamirezÎncă nu există evaluări
- Robotica Auf 1404Document13 paginiRobotica Auf 1404Jesus-09Încă nu există evaluări
- Principios Electricos y Aplicaciones DigitalesDocument12 paginiPrincipios Electricos y Aplicaciones DigitalesAndreszhito FloresÎncă nu există evaluări
- O ISIC-2010-224 Principios Electricos y Aplicaciones DigitalDocument12 paginiO ISIC-2010-224 Principios Electricos y Aplicaciones DigitalHSantÎncă nu există evaluări
- Principios Electricos y Aplicaciones DigitalDocument12 paginiPrincipios Electricos y Aplicaciones Digitalaxel_oscÎncă nu există evaluări
- MROB - Sistemas Robóticos MóvilesDocument9 paginiMROB - Sistemas Robóticos MóvilesluisÎncă nu există evaluări
- 4eso - Cuaderno Aula Tecnología 4º PDFDocument11 pagini4eso - Cuaderno Aula Tecnología 4º PDFCarlos AlvaradoÎncă nu există evaluări
- Instrumentación electrónica aplicada: Prácticas de laboratorioDe la EverandInstrumentación electrónica aplicada: Prácticas de laboratorioEvaluare: 3.5 din 5 stele3.5/5 (7)
- Guia Integradora 90169Document15 paginiGuia Integradora 90169Dimarsing2010Încă nu există evaluări
- Silabus Fiis Ioii 2012-IiokDocument4 paginiSilabus Fiis Ioii 2012-IiokNilthon Ch BaquerizoÎncă nu există evaluări
- Transmisiones AutomáticasDocument7 paginiTransmisiones AutomáticaskevynÎncă nu există evaluări
- Syllabus - AlgoritmiaDocument8 paginiSyllabus - AlgoritmiaMauricio Zafra AycardiÎncă nu există evaluări
- 2 ECA 1 PLC 2016Document6 pagini2 ECA 1 PLC 2016sotojaviermx-1Încă nu există evaluări
- F-Da-36 Secuencia Didactica Mod I Sub III 204mDocument4 paginiF-Da-36 Secuencia Didactica Mod I Sub III 204mRuben NeriaÎncă nu există evaluări
- Enfoque práctico de la teoría de robots: Con aplicaciones en MatlabDe la EverandEnfoque práctico de la teoría de robots: Con aplicaciones en MatlabEvaluare: 5 din 5 stele5/5 (2)
- Circuitos y Maquinas ElectricasDocument9 paginiCircuitos y Maquinas ElectricasOmarManjarrezÎncă nu există evaluări
- Matematicas Aplicadasa ComunicacionesDocument10 paginiMatematicas Aplicadasa ComunicacionesStephany ScottÎncă nu există evaluări
- Amplificadores OperacionalesDocument9 paginiAmplificadores OperacionalesEduardo RuizÎncă nu există evaluări
- RoboticaDocument12 paginiRoboticaDario RodriguezÎncă nu există evaluări
- Silabo Taller Electronica IIDocument3 paginiSilabo Taller Electronica IIHeverDanielYauriCamizanÎncă nu există evaluări
- ESTRUCTURAS DISCRETASDocument13 paginiESTRUCTURAS DISCRETASjose luisÎncă nu există evaluări
- Manual de Practicas de Estructura de DatosDocument43 paginiManual de Practicas de Estructura de DatosRicardo Leyva RamirezÎncă nu există evaluări
- Orientacion Academica EstandarDocument20 paginiOrientacion Academica EstandarAngel MelaraÎncă nu există evaluări
- Introducción a la Ingeniería MecatrónicaDocument6 paginiIntroducción a la Ingeniería MecatrónicaNayro PazmiñoÎncă nu există evaluări
- Optoelectronica PDFDocument12 paginiOptoelectronica PDFPiñon Skot de SfÎncă nu există evaluări
- CHF-008 Introduccion A La InformaticaDocument15 paginiCHF-008 Introduccion A La InformaticaAriela CastroÎncă nu există evaluări
- 0.1. Guía Didáctica-Campo de La IEM PDFDocument18 pagini0.1. Guía Didáctica-Campo de La IEM PDFJosué Zapata DíazÎncă nu există evaluări
- Matemáticas discretas: conceptos, algoritmos y aplicacionesDocument71 paginiMatemáticas discretas: conceptos, algoritmos y aplicacionesAmir LlopisÎncă nu există evaluări
- Portafolio Electronica Potencia 316Document61 paginiPortafolio Electronica Potencia 316erickÎncă nu există evaluări
- Programac Tercero ElectricidadDocument26 paginiProgramac Tercero ElectricidadCarlos QuintanaÎncă nu există evaluări
- 131 6 Licenciatura en Ingenieria en Computacion CUADocument12 pagini131 6 Licenciatura en Ingenieria en Computacion CUAIngeniero Elio PonceÎncă nu există evaluări
- Diseño Practica y Reflexion de La Enseñanza Planificacion AnualDocument6 paginiDiseño Practica y Reflexion de La Enseñanza Planificacion AnualJULIETA ROMEROÎncă nu există evaluări
- Silabo Fundamento de Robotica Nueva EsperanzaDocument7 paginiSilabo Fundamento de Robotica Nueva EsperanzaVíctor Daniel OzcoÎncă nu există evaluări
- Silabo - Sistemas DistribuidosDocument6 paginiSilabo - Sistemas DistribuidosFrancisco Del Aguila PinedoÎncă nu există evaluări
- Diseño de sistemas mecatrónicosDocument6 paginiDiseño de sistemas mecatrónicosLG RVÎncă nu există evaluări
- Silabo Mef AutomotrizDocument7 paginiSilabo Mef AutomotrizWilliam ManotoaÎncă nu există evaluări
- Ensayo ATIDocument16 paginiEnsayo ATIAxelÎncă nu există evaluări
- Sistemas Electrónicos para InformáticaDocument11 paginiSistemas Electrónicos para InformáticaJorge RojasÎncă nu există evaluări
- ProgramacionTecnologia4eso IESDocument41 paginiProgramacionTecnologia4eso IESEz FrancoÎncă nu există evaluări
- Electrónica análoga: Diseño de circuitosDe la EverandElectrónica análoga: Diseño de circuitosEvaluare: 4.5 din 5 stele4.5/5 (15)
- La investigación en ingeniería: Análisis y solución de casos desde el aulaDe la EverandLa investigación en ingeniería: Análisis y solución de casos desde el aulaEvaluare: 4 din 5 stele4/5 (2)
- Manual de prácticas de laboratorio de diseño digitalDe la EverandManual de prácticas de laboratorio de diseño digitalEvaluare: 5 din 5 stele5/5 (2)
- Informe Case SNDocument4 paginiInforme Case SNAldo GamboaÎncă nu există evaluări
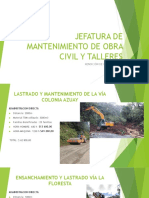
- Jeftaura de TrabajosDocument24 paginiJeftaura de TrabajosAldo GamboaÎncă nu există evaluări
- Camaras UltimoDocument3 paginiCamaras UltimoAldo GamboaÎncă nu există evaluări
- Oficio PracticasDocument1 paginăOficio PracticasAldo GamboaÎncă nu există evaluări
- Camaras UltimoDocument3 paginiCamaras UltimoAldo GamboaÎncă nu există evaluări
- Instrucciones Paper IEEEDocument3 paginiInstrucciones Paper IEEENBELTRANCUELLARÎncă nu există evaluări
- Mire Amor Ya Solo 88 Créditos Amor Q Emoción Debo Darle Con Todo Este Semestre . Creo Q Ya Con Las Notas Pasadas Aca No Se Puede Hacer Nada VDDDocument1 paginăMire Amor Ya Solo 88 Créditos Amor Q Emoción Debo Darle Con Todo Este Semestre . Creo Q Ya Con Las Notas Pasadas Aca No Se Puede Hacer Nada VDDAldo GamboaÎncă nu există evaluări
- Hoja de InscripcionDocument1 paginăHoja de InscripcionAldo GamboaÎncă nu există evaluări
- Robotica Cine InversoDocument3 paginiRobotica Cine InversoAldo GamboaÎncă nu există evaluări
- Control AdoresDocument14 paginiControl Adoresadrian_kppÎncă nu există evaluări
- SQL PlusDocument34 paginiSQL PlusLuis Alejandro Curay ValdiviezoÎncă nu există evaluări
- Analisis Financiero BasicoDocument42 paginiAnalisis Financiero BasicoLeticia Rodrìguez VadésÎncă nu există evaluări
- Campo MagneticoDocument3 paginiCampo MagneticoAldo GamboaÎncă nu există evaluări
- Trabajo de LaboratorioDocument12 paginiTrabajo de LaboratorioAldo GamboaÎncă nu există evaluări
- Construcción de estructuras de acero para PEMEXDocument23 paginiConstrucción de estructuras de acero para PEMEXNájera JoséÎncă nu există evaluări
- Capacidad de Carga Cimiento-RocaDocument5 paginiCapacidad de Carga Cimiento-RocaKeivenÎncă nu există evaluări
- Unidad 1Document38 paginiUnidad 1Diana LunaÎncă nu există evaluări
- Padrón Contratistas Junio 2015Document57 paginiPadrón Contratistas Junio 2015Loults TowÎncă nu există evaluări
- Guía para la elaboración de proyectos de investigación científica en la Universidad Nacional de UcayaliDocument80 paginiGuía para la elaboración de proyectos de investigación científica en la Universidad Nacional de UcayaliRaNa ReNeÎncă nu există evaluări
- Construcción de cunetas y canales de riegoDocument6 paginiConstrucción de cunetas y canales de riegoWillard Valverde MarcelianoÎncă nu există evaluări
- L.5 Circuitos LLDocument13 paginiL.5 Circuitos LLCristhian PortocarreroÎncă nu există evaluări
- Cálculo Estructural de Filtro LentoDocument15 paginiCálculo Estructural de Filtro LentoWJohnnyFernándezÎncă nu există evaluări
- Analisis y Distribución de CargasDocument15 paginiAnalisis y Distribución de CargasAníbal Rafael Rodríguez ArveloÎncă nu există evaluări
- Modelo Informe 2Document13 paginiModelo Informe 2Jorge MaihuireÎncă nu există evaluări
- 1987 2014 PDFDocument144 pagini1987 2014 PDFOscar Alejandro Rosas CasillasÎncă nu există evaluări
- Estudio de Corto Circuito en Sistemas IndustrialesDocument1 paginăEstudio de Corto Circuito en Sistemas IndustrialesCesarÎncă nu există evaluări
- Diseño de Vigas Con Disipación DESDocument52 paginiDiseño de Vigas Con Disipación DESandresÎncă nu există evaluări
- Arquitectura EmpresarialDocument57 paginiArquitectura EmpresariallhervertÎncă nu există evaluări
- Catalogo Riphorsa 2010 Rev1Document157 paginiCatalogo Riphorsa 2010 Rev1Christian Sarai Zavala RosasÎncă nu există evaluări
- Zapatas CorridasDocument3 paginiZapatas CorridasEduardo Garcia CeballosÎncă nu există evaluări
- Diseno Estructural Caseta de ControlDocument8 paginiDiseno Estructural Caseta de Controlwalticus100% (1)
- Construcción de terraplén para desplante estructuraDocument2 paginiConstrucción de terraplén para desplante estructurarobertoÎncă nu există evaluări
- Migración de inversores pala mineraDocument9 paginiMigración de inversores pala mineraAldo PabloÎncă nu există evaluări
- Examen de Materiales de IngenieriaDocument13 paginiExamen de Materiales de IngenieriaJoseph GuerreroÎncă nu există evaluări
- Reglamentos de ConstruccionDocument3 paginiReglamentos de ConstruccionluisadkdkdkdkdkÎncă nu există evaluări
- Estructura Final - E1 PDFDocument1 paginăEstructura Final - E1 PDFRicardo Renteria PalaciosÎncă nu există evaluări
- Confiabilidad Sísmica de Estructuras Considerando Diferentes Criterios de Capacidad de DeformaciónDocument15 paginiConfiabilidad Sísmica de Estructuras Considerando Diferentes Criterios de Capacidad de DeformaciónJosué Azurín RendichÎncă nu există evaluări
- Universidad de Guayaquil Facultad de Ciencias AdministrativasDocument48 paginiUniversidad de Guayaquil Facultad de Ciencias AdministrativasstephanyÎncă nu există evaluări
- CLASE 01 Introduccion A La Ing CivilDocument25 paginiCLASE 01 Introduccion A La Ing CivilbrigeetÎncă nu există evaluări
- HAMMER EspanolDocument2 paginiHAMMER EspanolsebasfarsaÎncă nu există evaluări
- La Compatibilidad Electromagnética y La Seguridad FuncionalDocument9 paginiLa Compatibilidad Electromagnética y La Seguridad FuncionalJessica JanethÎncă nu există evaluări
- Analisis de Precios Unitarios Edificio Multifamiliar BrasilDocument5 paginiAnalisis de Precios Unitarios Edificio Multifamiliar BrasilDario Boza100% (3)
- Formato TRABAJO MonográficoDocument6 paginiFormato TRABAJO MonográficoCabesa LocaÎncă nu există evaluări