S-ar putea să vă placă și
- Metodos Impacto AmbientalDocument37 paginiMetodos Impacto AmbientalJuan Carlos TÎncă nu există evaluări
- MantenimientoDocument14 paginiMantenimientoUli EuÎncă nu există evaluări
- Metodologia de Calculo DemandaDocument16 paginiMetodologia de Calculo DemandaJuan Carlos TÎncă nu există evaluări
- Banco de Preguntas Comunicaciones IIDocument42 paginiBanco de Preguntas Comunicaciones IIJuan Carlos T100% (2)
- Deber Comunicaciones 2Document21 paginiDeber Comunicaciones 2Juan Carlos TÎncă nu există evaluări
- Calculo de Regulacion de Voltaje RETIEDocument16 paginiCalculo de Regulacion de Voltaje RETIEHernando Robledo100% (1)
- 7 Trazado y DimensionamientoDocument20 pagini7 Trazado y DimensionamientoJuan Carlos TÎncă nu există evaluări
- Caso CarreteraDocument9 paginiCaso CarreteraJuan Carlos TÎncă nu există evaluări
- Modbus PDFDocument28 paginiModbus PDFJuan Carlos TÎncă nu există evaluări
- Calculo de Corto CircuitoDocument18 paginiCalculo de Corto CircuitosesadiÎncă nu există evaluări
- 3 Estudio y Determinación de Cargas Eléctricas. Topografía de La Red Primaria y Secundaria.Document12 pagini3 Estudio y Determinación de Cargas Eléctricas. Topografía de La Red Primaria y Secundaria.Juan Carlos TÎncă nu există evaluări
- Principios de Administración de EmpresasDocument22 paginiPrincipios de Administración de EmpresasJuan Carlos TÎncă nu există evaluări
- 2 Cronograma Unificado RobotDocument2 pagini2 Cronograma Unificado RobotJuan Carlos TÎncă nu există evaluări
- 6 Protecciones en Redes de DistribuciónDocument17 pagini6 Protecciones en Redes de DistribuciónJuan Carlos TÎncă nu există evaluări
- 3 Estudio y Determinación de Cargas Eléctricas. Topografía de La Red Primaria y Secundaria.Document12 pagini3 Estudio y Determinación de Cargas Eléctricas. Topografía de La Red Primaria y Secundaria.Juan Carlos TÎncă nu există evaluări
- Paso A Paso GamsDocument5 paginiPaso A Paso GamsJuan Carlos TÎncă nu există evaluări
- Manual Técnico de Simbología para Diagramas Uniflares y Planos. V1Document12 paginiManual Técnico de Simbología para Diagramas Uniflares y Planos. V1Andres Felipe Muñoz AÎncă nu există evaluări
- Fundamentos de AdministraciónDocument27 paginiFundamentos de AdministraciónJuan Carlos TÎncă nu există evaluări
- Simbología DIN y NEMA PDFDocument48 paginiSimbología DIN y NEMA PDFskanimod74% (66)
- Sistema Por UnidadDocument114 paginiSistema Por UnidadMarco Antonio Pezo Castro100% (1)
- 3 Diseno - Ii-2Document49 pagini3 Diseno - Ii-2Juan Carlos TÎncă nu există evaluări
- Fundamentos de AdministraciónDocument27 paginiFundamentos de AdministraciónJuan Carlos TÎncă nu există evaluări
- Abb FactsDocument2 paginiAbb FactsingcanalesgÎncă nu există evaluări
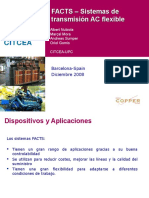
- 5 Factspresentacion 090707000449 Phpapp01Document22 pagini5 Factspresentacion 090707000449 Phpapp01Juan Carlos TÎncă nu există evaluări
- Ejercicos de Distribucion NormalDocument3 paginiEjercicos de Distribucion NormalJuan Carlos TÎncă nu există evaluări
- 101 Recetas de Cocina PDFDocument11 pagini101 Recetas de Cocina PDFcomelibro7788Încă nu există evaluări
- Consulta 1 de Sep1Document4 paginiConsulta 1 de Sep1Juan Carlos TÎncă nu există evaluări
- Malla Electric A 1Document1 paginăMalla Electric A 1Juan Carlos TÎncă nu există evaluări
- PR EDP Transf IntDocument19 paginiPR EDP Transf IntJuan Carlos TÎncă nu există evaluări
- Informe Programacion1 8Document23 paginiInforme Programacion1 8Juan Carlos TÎncă nu există evaluări
- Guia Farmacias y ConsultoriosDocument19 paginiGuia Farmacias y ConsultoriosmegorichÎncă nu există evaluări
- 8 Beneficios de La Respiración ConscienteDocument5 pagini8 Beneficios de La Respiración ConscientepapamaloteÎncă nu există evaluări
- Proyecto GanaderiaDocument177 paginiProyecto GanaderiaHelen JohnsonÎncă nu există evaluări
- Quishpe Mireya - Trabajo Autonomo 4 - 8484Document7 paginiQuishpe Mireya - Trabajo Autonomo 4 - 8484MIREYA MISHELL QUISHPE QUISHPEÎncă nu există evaluări
- Reproduccion HumanaDocument22 paginiReproduccion Humanaghdezq100% (2)
- Sesion 1 MateriaDocument4 paginiSesion 1 MateriaDayron Jossue CUTIMBO HINOJOSAÎncă nu există evaluări
- DIPTICODocument9 paginiDIPTICORenzoÎncă nu există evaluări
- EICOSANOIDESDocument8 paginiEICOSANOIDESKim ZoldyckÎncă nu există evaluări
- Cs705xtk02 Data Sheet SpaDocument1 paginăCs705xtk02 Data Sheet SpaGio RodriguezÎncă nu există evaluări
- Ingeniería Del Producto-F3Document53 paginiIngeniería Del Producto-F3Arnol CallataÎncă nu există evaluări
- CostaDocument10 paginiCostaAle RodriÎncă nu există evaluări
- Ensayo Manufactura de Piezas MecánicasDocument7 paginiEnsayo Manufactura de Piezas Mecánicassmsmenchu009Încă nu există evaluări
- Aplicando Lo Aprendido3 2° Básico CienciasDocument6 paginiAplicando Lo Aprendido3 2° Básico CienciasEsc Chapod MaquehueÎncă nu există evaluări
- Trabajo Estadistica DescriptivaDocument8 paginiTrabajo Estadistica DescriptivaSebastian TaleroÎncă nu există evaluări
- Taller de Probabilidades AlumnosDocument9 paginiTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASÎncă nu există evaluări
- Microbiologia de La Placa DentalDocument10 paginiMicrobiologia de La Placa DentalRaul RodriguezÎncă nu există evaluări
- PRIMEROS AUXILIOS - 4 HorasDocument41 paginiPRIMEROS AUXILIOS - 4 HorasDaniela Perines Rojas100% (1)
- PS Recocemos Los Tipos de Familia 26-04Document8 paginiPS Recocemos Los Tipos de Familia 26-04Vicky ZorrillaÎncă nu există evaluări
- Deontología Semana 9 - Uroosevelt 2022 - 1 Docentes - FarDocument37 paginiDeontología Semana 9 - Uroosevelt 2022 - 1 Docentes - FarSergio CristobalÎncă nu există evaluări
- Schoharie Creek BridgeDocument3 paginiSchoharie Creek Bridgefabricio88Încă nu există evaluări
- Romeo CapitalDocument277 paginiRomeo Capitalyesenia lizarragaÎncă nu există evaluări
- Función RenalDocument19 paginiFunción RenalMonse CarbajalÎncă nu există evaluări
- TESIS SemillaDocument101 paginiTESIS Semillamadeleyn salinas godoyÎncă nu există evaluări
- Resumen Capitulo 2 Libro Termodinamica de CengelDocument5 paginiResumen Capitulo 2 Libro Termodinamica de CengelSophia CuadrosÎncă nu există evaluări
- Osa WoriwoDocument7 paginiOsa Woriwocesar awo ogunda dioÎncă nu există evaluări
- Zonas Sismicas de MexicoDocument2 paginiZonas Sismicas de MexicoAlessander CabreraÎncă nu există evaluări
- 153 Minutos (Inspectora Ruth Blanco 2) - Monica Benitez-HolaebookDocument108 pagini153 Minutos (Inspectora Ruth Blanco 2) - Monica Benitez-HolaebookBEA18Încă nu există evaluări
- Infografía Inteligencia EmocionalDocument3 paginiInfografía Inteligencia EmocionalYessica Andrea Baez NorambuenaÎncă nu există evaluări
- 5-Ejercicio EJ - 5Document4 pagini5-Ejercicio EJ - 5rouse valladaresÎncă nu există evaluări
- INJERTOSDocument31 paginiINJERTOSmipdance100% (1)