S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- 12 - Fatigue of MetalsDocument55 pagini12 - Fatigue of Metalsvoldemorts100% (1)
- Effect of Grain Size and Heat Treatment Upon Impact ToughnessDocument14 paginiEffect of Grain Size and Heat Treatment Upon Impact Toughnessmass3444Încă nu există evaluări
- Astm A312Document10 paginiAstm A312ulkerdincerÎncă nu există evaluări
- Ensayo de Ultrasonido Industrial Astm1444 PDFDocument12 paginiEnsayo de Ultrasonido Industrial Astm1444 PDFBetzabethZuñigaÎncă nu există evaluări
- Rigs Installed BaseDocument184 paginiRigs Installed BaseGopu PerumalÎncă nu există evaluări
- Cam BasicsDocument50 paginiCam Basicsmass3444Încă nu există evaluări
- Fundamentals of Centrifugal PumpsDocument120 paginiFundamentals of Centrifugal Pumpswholenumber100% (1)
- Weight Chart For Hexagon Bolts & NutsDocument1 paginăWeight Chart For Hexagon Bolts & Nutsmtanoglu111Încă nu există evaluări
- A576 Tvwe2918Document6 paginiA576 Tvwe2918mass3444Încă nu există evaluări
- Standard Pipe Sizes ME303-4.1.1Document5 paginiStandard Pipe Sizes ME303-4.1.1manashbdÎncă nu există evaluări
- Pipe Thread Types and DesignationsDocument6 paginiPipe Thread Types and Designationsvijayn33Încă nu există evaluări
- BR Cat BN STD I-uk-De-f r01 0Document0 paginiBR Cat BN STD I-uk-De-f r01 0mass3444Încă nu există evaluări
- Engg Metallurgy Lecture 5Document54 paginiEngg Metallurgy Lecture 5Patil Sudheer GowdÎncă nu există evaluări
- Fluid 12Document156 paginiFluid 12fadapow4uÎncă nu există evaluări
- Fundamentals of Centrifugal PumpsDocument120 paginiFundamentals of Centrifugal Pumpswholenumber100% (1)
- CHAPTER 2 - Motion in Two DimensionDocument8 paginiCHAPTER 2 - Motion in Two Dimensionmass3444Încă nu există evaluări
- Little Pump Big Head - The Regenerative Turbine PumpDocument4 paginiLittle Pump Big Head - The Regenerative Turbine Pumpmass3444Încă nu există evaluări
- 02 ForgingDocument58 pagini02 ForgingRavindra ReddyÎncă nu există evaluări
- 12 - Fatigue of MetalsDocument55 pagini12 - Fatigue of Metalsvoldemorts100% (1)
- Metallurgical Test Certificate: MCIE Die NoDocument1 paginăMetallurgical Test Certificate: MCIE Die Nomass3444Încă nu există evaluări
- 42crmo4 Raw Material Specification Document: Doc Ref CSMEP/RMSPC/0001 Date 24.08.2013 Issue Rev 1.0 Page No 1 of 4Document4 pagini42crmo4 Raw Material Specification Document: Doc Ref CSMEP/RMSPC/0001 Date 24.08.2013 Issue Rev 1.0 Page No 1 of 4mass3444Încă nu există evaluări
- Cent Pum-NbDocument27 paginiCent Pum-Nbmass3444Încă nu există evaluări
- Is.4163.2004 Inclusion RatingDocument43 paginiIs.4163.2004 Inclusion Ratingmass3444100% (1)
- EMD ReplacementPartsCatalog No.191for645Engines PartADocument99 paginiEMD ReplacementPartsCatalog No.191for645Engines PartAmass3444100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Api 800 Series ManualDocument20 paginiApi 800 Series ManualCharles HillÎncă nu există evaluări
- Cam Effects PDFDocument6 paginiCam Effects PDFGiovanniJara100% (6)
- Mechanical Engineering-Theory of Machines MCQ PDFFWWW - alleXAMREVIEWDocument23 paginiMechanical Engineering-Theory of Machines MCQ PDFFWWW - alleXAMREVIEWwalunjmayur45275Încă nu există evaluări
- 9A03401 Kinematics of MachineryDocument8 pagini9A03401 Kinematics of MachinerysivabharathamurthyÎncă nu există evaluări
- April 5, 1949. A. Corte 2,466,577: Filed Dec. 6, 1944 5 Sheets-Sheet LDocument16 paginiApril 5, 1949. A. Corte 2,466,577: Filed Dec. 6, 1944 5 Sheets-Sheet LHosiah BlackfordÎncă nu există evaluări
- Fanuc A-63639e-050 - 01 - 051104Document72 paginiFanuc A-63639e-050 - 01 - 051104venkatesh_svss100% (2)
- 5 - Serie 50 IndicadPosElec-mec PDFDocument4 pagini5 - Serie 50 IndicadPosElec-mec PDFOscar CepedaÎncă nu există evaluări
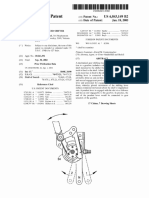
- Us6843149 PDFDocument10 paginiUs6843149 PDFDana CucuÎncă nu există evaluări
- Surfcam v5 Whats NewDocument17 paginiSurfcam v5 Whats Newnnn764Încă nu există evaluări
- College: Design of Machine ElementsDocument4 paginiCollege: Design of Machine ElementsNikhil SekharanÎncă nu există evaluări
- Fabric Manufacturing Engineering-1Document103 paginiFabric Manufacturing Engineering-1Maruf Uddin Ahmed50% (2)
- Vp44 Pump Detail SchematicDocument7 paginiVp44 Pump Detail Schematicvinod7mungroo75% (8)
- Conveyor Safety SwitchesDocument6 paginiConveyor Safety Switches2003vinayÎncă nu există evaluări
- Information On Different Needle Constructions and Needle ManufacturesDocument6 paginiInformation On Different Needle Constructions and Needle ManufacturesDilina De SilvaÎncă nu există evaluări
- Motorized Hydraulic JackDocument17 paginiMotorized Hydraulic JackAMBAR APTURKARÎncă nu există evaluări
- BTEC L3 Unit 12 - Applications of Mechanical Systems in Engineering B&WDocument9 paginiBTEC L3 Unit 12 - Applications of Mechanical Systems in Engineering B&Walexandre_motta_3Încă nu există evaluări
- Dynamics Lab ManualDocument69 paginiDynamics Lab ManualDr. B. Ramesh100% (4)
- TESC Safety Products GB 2010 10 Nuevo Catalogo Compacto.Document61 paginiTESC Safety Products GB 2010 10 Nuevo Catalogo Compacto.hector19899100% (1)
- Theory of Machines by R.S. Khurmi, J.K. Gupta-840-841Document2 paginiTheory of Machines by R.S. Khurmi, J.K. Gupta-840-841joe100% (1)
- A New Approach To Completing A Previously Drilled Subsea WellDocument8 paginiA New Approach To Completing A Previously Drilled Subsea WellmnoriegalÎncă nu există evaluări
- DYNAMICS LAB VIVA QUESTIONS FullDocument4 paginiDYNAMICS LAB VIVA QUESTIONS FullSudipta NathÎncă nu există evaluări
- Error Codes eDocument56 paginiError Codes evictor81830% (1)
- SIMOTION Traverser V4 0 0Document95 paginiSIMOTION Traverser V4 0 0Abez FiveÎncă nu există evaluări
- Broom Sewing MachineDocument8 paginiBroom Sewing MachineMarcio André KviatkovskiÎncă nu există evaluări
- Parts List EasmanDocument14 paginiParts List EasmanRoberto TrujilloÎncă nu există evaluări
- Lab 4 Tappet Shedding IqbalDocument6 paginiLab 4 Tappet Shedding IqbalEngr Mujahid MehdiÎncă nu există evaluări
- Question Bank: Subject Code & Name: Me2203 Kinematics of Machinery Staff Incharge:B.SusilaDocument28 paginiQuestion Bank: Subject Code & Name: Me2203 Kinematics of Machinery Staff Incharge:B.SusilaAnonymous pXkq6u4HZjÎncă nu există evaluări
- Ae2201 NotesDocument32 paginiAe2201 NotesRohit MunaÎncă nu există evaluări
- Unit Wise 16 Mark QuestionsDocument29 paginiUnit Wise 16 Mark QuestionsPreethi SharmiÎncă nu există evaluări
- 2 2914 Keilschieber ENDocument326 pagini2 2914 Keilschieber ENHemant Goma96Încă nu există evaluări