S-ar putea să vă placă și
- Applications of Artificial Neural Networks in Friction Stir Welding: A ReviewDocument5 paginiApplications of Artificial Neural Networks in Friction Stir Welding: A Revieweditor_ijtelÎncă nu există evaluări
- Experimental Investigations of CI Engine by Using Different Blends of Neat Karanja Oil and Diesel at Different Injection PressuresDocument3 paginiExperimental Investigations of CI Engine by Using Different Blends of Neat Karanja Oil and Diesel at Different Injection Pressureseditor_ijtelÎncă nu există evaluări
- Design of Floating Point Arithmetic Logic Unit With Universal GateDocument5 paginiDesign of Floating Point Arithmetic Logic Unit With Universal Gateeditor_ijtelÎncă nu există evaluări
- Online Marketing in Indian Politics: Role of Social MediaDocument8 paginiOnline Marketing in Indian Politics: Role of Social Mediaeditor_ijtelÎncă nu există evaluări
- Advanced File Sharing in Peer To Peer SystemsDocument4 paginiAdvanced File Sharing in Peer To Peer Systemseditor_ijtelÎncă nu există evaluări
- Wireless Power Transfer in 3D SpaceDocument5 paginiWireless Power Transfer in 3D Spaceeditor_ijtelÎncă nu există evaluări
- Essential Requirements of PPAPDocument4 paginiEssential Requirements of PPAPeditor_ijtelÎncă nu există evaluări
- Design and Fabrication of Compact Size Fluidized Bed Gasifier For Automotive VehicleDocument4 paginiDesign and Fabrication of Compact Size Fluidized Bed Gasifier For Automotive Vehicleeditor_ijtelÎncă nu există evaluări
- Adaptive Non-Linear Bayesian Filter For ECG DenoisingDocument5 paginiAdaptive Non-Linear Bayesian Filter For ECG Denoisingeditor_ijtelÎncă nu există evaluări
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocument7 paginiControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelÎncă nu există evaluări
- Design and Implementation of Fast - Lifting Based Wavelet Transform For Image CompressionDocument5 paginiDesign and Implementation of Fast - Lifting Based Wavelet Transform For Image Compressioneditor_ijtelÎncă nu există evaluări
- A Study On Indian License Plate IdentificationDocument5 paginiA Study On Indian License Plate Identificationeditor_ijtelÎncă nu există evaluări
- Accessible Content Generation For The Learning DisabledDocument3 paginiAccessible Content Generation For The Learning Disablededitor_ijtelÎncă nu există evaluări
- Mobile Rescue Robot For Human Detection in Case of DisasterDocument4 paginiMobile Rescue Robot For Human Detection in Case of Disastereditor_ijtelÎncă nu există evaluări
- A Study On Multi Material Gate All Around SOI MOSFETDocument5 paginiA Study On Multi Material Gate All Around SOI MOSFETeditor_ijtelÎncă nu există evaluări
- Hierarchical Organization of Data Centre To Improve Quality of Services (QoS)Document5 paginiHierarchical Organization of Data Centre To Improve Quality of Services (QoS)editor_ijtelÎncă nu există evaluări
- Implementation of Different Low Power Multipliers Using VerilogDocument6 paginiImplementation of Different Low Power Multipliers Using Verilogeditor_ijtelÎncă nu există evaluări
- FPGA Based Three Phase Multilevel PWM InverterDocument4 paginiFPGA Based Three Phase Multilevel PWM Invertereditor_ijtel100% (1)
- Implementation of A Capacitor Less Low Dropout Voltage Regulator On Chip (SOC)Document7 paginiImplementation of A Capacitor Less Low Dropout Voltage Regulator On Chip (SOC)editor_ijtel100% (1)
- G.P.S. Use in EHV and HVDC Transmission Line ProtectionDocument5 paginiG.P.S. Use in EHV and HVDC Transmission Line Protectioneditor_ijtelÎncă nu există evaluări
- The Effect of Under Nutrition On Schooling, Adult Productivity and Economic Growth in South - West Madhya Pradesh, IndiaDocument7 paginiThe Effect of Under Nutrition On Schooling, Adult Productivity and Economic Growth in South - West Madhya Pradesh, Indiaeditor_ijtelÎncă nu există evaluări
- Low Cost Computerized Digital IC TesterDocument4 paginiLow Cost Computerized Digital IC Testereditor_ijtelÎncă nu există evaluări
- Gender Identification in Digital X-Ray Images of Femur BoneDocument4 paginiGender Identification in Digital X-Ray Images of Femur Boneeditor_ijtelÎncă nu există evaluări
- Preserve The Privacy of Anonymous and Confidential Database Using K-AnonymityDocument5 paginiPreserve The Privacy of Anonymous and Confidential Database Using K-Anonymityeditor_ijtelÎncă nu există evaluări
- Courseware Quality Groups Tie-In To ReinforcingDocument4 paginiCourseware Quality Groups Tie-In To Reinforcingeditor_ijtelÎncă nu există evaluări
- Spiritual and Moral Principles For Promoting Gender Sensitivity and EqualityDocument3 paginiSpiritual and Moral Principles For Promoting Gender Sensitivity and Equalityeditor_ijtelÎncă nu există evaluări
- Performance Comparison of M-PSK and M-QAM Modulations For WiMAX OFDM System Under The Rayleigh Fading ChannelDocument5 paginiPerformance Comparison of M-PSK and M-QAM Modulations For WiMAX OFDM System Under The Rayleigh Fading Channeleditor_ijtelÎncă nu există evaluări
- Max Min Sorting Algorithm A New Sorting ApproachDocument4 paginiMax Min Sorting Algorithm A New Sorting Approacheditor_ijtelÎncă nu există evaluări
- Creep Life Estimation of Low Pressure Reaction Turbine BladeDocument3 paginiCreep Life Estimation of Low Pressure Reaction Turbine Bladeeditor_ijtelÎncă nu există evaluări
- Effect of Interactive Hypermedia Program On Mathematics Achievement in Relation To Locus of ControlDocument5 paginiEffect of Interactive Hypermedia Program On Mathematics Achievement in Relation To Locus of Controleditor_ijtelÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Attachment - 1 - 2021-10-27T013155.320Document3 paginiAttachment - 1 - 2021-10-27T013155.320oliver wekesaÎncă nu există evaluări
- Java Fundamentals Section 7 Part 2: Creating An Inventory Project ProjectDocument4 paginiJava Fundamentals Section 7 Part 2: Creating An Inventory Project ProjectnaniÎncă nu există evaluări
- Conduit Installation WMSDocument7 paginiConduit Installation WMSmanohar GurramÎncă nu există evaluări
- Use LiveSuite To Install Driver and Upgrade FirmwareDocument3 paginiUse LiveSuite To Install Driver and Upgrade FirmwareVictor Siruela MatosÎncă nu există evaluări
- Python - PPT CieDocument18 paginiPython - PPT CieSurisetty ManjuÎncă nu există evaluări
- Avr 505 ManualDocument34 paginiAvr 505 ManualaxxelloneÎncă nu există evaluări
- SX-KLCS-B: Product Data SheetDocument2 paginiSX-KLCS-B: Product Data SheetTECUMCE GOMEZ PEREZÎncă nu există evaluări
- An Introduction To The CISSP & SSCP Certifications: Wilfred L. Camilleri, CISSPDocument49 paginiAn Introduction To The CISSP & SSCP Certifications: Wilfred L. Camilleri, CISSPchirag2beÎncă nu există evaluări
- GIS Siemens Catalogo 36kVDocument16 paginiGIS Siemens Catalogo 36kVCristian Rene Orozco PerezÎncă nu există evaluări
- Sap C ts452 2022 Dumps by Odom 15 08 2023 7qa VceexamstestDocument9 paginiSap C ts452 2022 Dumps by Odom 15 08 2023 7qa VceexamstestLilian Michel Youssef MalekÎncă nu există evaluări
- VSL Heavy LiftingDocument16 paginiVSL Heavy LiftingDrPadipat ChaemmangkangÎncă nu există evaluări
- Quality Assurance CV TemplateDocument2 paginiQuality Assurance CV Templatebaluchakp100% (1)
- FLEXIS Fluxus G704, G704 A2 (Ing)Document241 paginiFLEXIS Fluxus G704, G704 A2 (Ing)biotech666Încă nu există evaluări
- 20480A ENU TrainerHandbookDocument627 pagini20480A ENU TrainerHandbookMiticuta SurubÎncă nu există evaluări
- LT3 Lt3se00mDocument2 paginiLT3 Lt3se00mLucian SinpetruÎncă nu există evaluări
- Ursalink UR71 Industrial Cellular Router DatasheetDocument6 paginiUrsalink UR71 Industrial Cellular Router DatasheetUrsalink MarketingÎncă nu există evaluări
- Nokia Siemens Networks Information Browser Installation and Setup GuideDocument16 paginiNokia Siemens Networks Information Browser Installation and Setup GuideФантомас МихалычÎncă nu există evaluări
- GL Studio Aero Brochure 2023 - WebDocument4 paginiGL Studio Aero Brochure 2023 - WebAnees KhanÎncă nu există evaluări
- ITIL Interview QuestionsDocument6 paginiITIL Interview QuestionsasimÎncă nu există evaluări
- Calibration Procedure of Concrete Batching Plant ScalesDocument2 paginiCalibration Procedure of Concrete Batching Plant ScalesKevin Tang100% (2)
- Step by Step Procedure-PMAY (U) Mobile AppDocument16 paginiStep by Step Procedure-PMAY (U) Mobile AppAshokÎncă nu există evaluări
- What Is Burst in GSM and Burst Types in GSMDocument2 paginiWhat Is Burst in GSM and Burst Types in GSMAbid Ur RehmanÎncă nu există evaluări
- AutoKriti 7.0Document60 paginiAutoKriti 7.0Bhanuj VermaÎncă nu există evaluări
- Types of Simple MachinesDocument37 paginiTypes of Simple MachinesAd Man GeTigÎncă nu există evaluări
- B. Inggris XiDocument6 paginiB. Inggris XiAnita LestariÎncă nu există evaluări
- Instrument TransformerDocument8 paginiInstrument TransformerShaip DautiÎncă nu există evaluări
- MPSA13 Data SheetDocument5 paginiMPSA13 Data SheetbananameepÎncă nu există evaluări
- l2 Uplink Discard IssueDocument5 paginil2 Uplink Discard IssueSumanth JoglekarÎncă nu există evaluări
- Cloud Based VOIP Phone System Including The Mitel 6900 SeriesDocument7 paginiCloud Based VOIP Phone System Including The Mitel 6900 SeriesTele-Verse Communications, Inc.Încă nu există evaluări
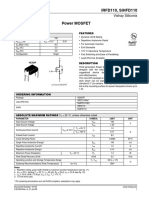
- Irfd110, Sihfd110: Vishay SiliconixDocument8 paginiIrfd110, Sihfd110: Vishay SiliconixJaviÎncă nu există evaluări