Documente Academic
Documente Profesional
Documente Cultură
Steering Gears
Încărcat de
hpss770 evaluări0% au considerat acest document util (0 voturi)
83 vizualizări64 paginimarine
Drepturi de autor
© © All Rights Reserved
Formate disponibile
DOC, PDF, TXT sau citiți online pe Scribd
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentmarine
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca DOC, PDF, TXT sau citiți online pe Scribd
0 evaluări0% au considerat acest document util (0 voturi)
83 vizualizări64 paginiSteering Gears
Încărcat de
hpss77marine
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca DOC, PDF, TXT sau citiți online pe Scribd
Sunteți pe pagina 1din 64
Rudders
A rudder allows the ship to turn, simple plates have been
superseded by plates welded to cast or fabricated frame.
Rudders are hollow and so provide for some buoyancy . In
order to minimise the risk of corrosion internal surfaces
are provided with a protective coating and some are even
filled with foam. A drain plug is provided to allow for the
drainage of water , enable internal inspection to be made
using fiber optic device and even allow for the limited
application of a protective coating. Plates are welded to
the frames internally in order to provide flush fitting , the
final closing plate must be welded externally. A means of
lifting is provided taking the form of a tube as close to the
center of gravity as possible. Rudders are tested to a
pressure head 2.m above the top of the rudder.
If the rudder has its entire area aft of the rudder
stock then it is unbalanced .A rudder with between 2! and
!" of its area forward of the stock is balanced since
there will be some angle at which the resultant moment
on the stock due to the water force will be #ero. $ost
modern rudders are of the semi%balanced design. &his
means that that a certain proportion of the water force
acting on the after part of the rudder is counter acted by
the force acting on the for'd half of the rudder( hence, the
steering gear can be lighter and smaller. A rudder may lift
due to the buoyancy effect, the amount of lift is limited by
the )umper bar fitted to the stern frame. &he
)umper*rudder clearance must be less than the steering
gear cross head clearance to prevent damage. A rudder is
supported by means of a bearing pintle or a lower bearing
depending upon the design. +here a lower bearing is
employed the rudder is actually supported on split bearing
rings fitted on the lower face of the rudder and the upper
face of the sole piece , the extended lower section of the
stern frame upon which the rudder sits-
1
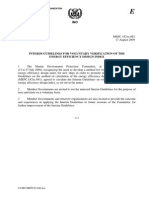
SEMI BALANCED RUDDER
Semi balanced rudder with rudder horn
Fully balanced rudder
&o reduce the amount of tor.ue re.uired to turn a rudder
the pivot point is moved back from the leading edge. &he
amount of tor.ue then varies depending on the angle of
attack. /ero tor.ue leads to instability with rudder moving
within its clearances.
2
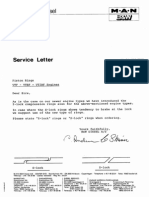
Spade Rudder
&he reduced diameter at the upper part is purely
to transmit tor.ue. &he lower section must also support
bending moments and hence increased diameter. +ith
3
twin rudder ships the inner rudder must turn through a
greater angle than the outer. &his is achieved by having
the tiller arm at an angle to the centre line of the rudder.
It is possible to have the blades angled in or out
when the wheel is amid ships to increase propulsive
efficiency.
SPECIAL STEERING DEVICES
THE KRT N!!LE
Ade.uate clearance is essential between propeller
blade tips and sternframe in order to minimise the risk of
vibration. As blades rotate water immediately ahead of
the blades is compressed and at the blade tips this
compression can be transmitted to the hull in the form of
a series of pulses which set up vibration. Ade.uate
clearance is necessary or alternatively constant clearance,
this being provided with ducted propellers such as the
0ort no##le 1riginally designed to reduce erosion on river
banks the no##le has proved itself also able to increase
thrust without increase of applied power.
&he no##le consists of a ring of aerofoil section
which forms a no##le surrounding the propeller. &he
suction of the propeller causes an acceleration of flow in
4
the mouth of the no##le and hence a drop of pressure in
this region. 2ince the pressure on the outer part of the
no##le remains relatively unchanged, there is a resulting
differential in pressure, which acting on the pro)ected
annulus of the no##le, gives the additional forward thrust.
&his additional thrust is transmitted direct from the kort
no##le to the hull via the no##le supports ,so that no
additional force acts on the propeller and shaft thrust
block.
&here are two types of 0ort no##les. &he fixed
type has a conventional rudder behind it, whereas with
the swivelling rudder type , the whole assembly is
supported by a carrier attached to the rudder stock and
actuated by the steering gear.
In the case of no##le rudders ,when helm is
applied , the increased thrust has an athwartship
component which has powerful steering effect, so that
hard over angles of 23' , or 4!' in special cases - are
sufficient to provide effective steering ahead during a
crash stop and ,provided the hull is a reasonable design ,
astern.
&his device is especially valuable for tugs,
trawlers, special vessels and more recently ,5677, which
are re.uired to manoeuvre well , particularly at slow
speed , and have the best propulsive efficiency.
8ollard pull gains between 4! and 3!" ,
e.uivalent to re%engining up to 9 4* times the original
power , have been obtained in tugs and trawlers and in
5677 gains in propulsive efficiency between : to 94" can
be expected. &he normal method of calculating rudder
tor.ue's can be applied to no##le rudders . &he maximum
steering effort is re.uired to return the rudder towards
midships and not to move the rudder over from
amidships. &hus , the steering gear must be designed to
keep control of the rudder under these conditions. ;or
diagram and additional notes see 'method of reducing
vibration' and 'increasing propulsive efficiency'
5
PLEUGER RUDDER
A normal rudder can only be effective when the
ship is moving, and the tor.ue it exerts varies with the
s.uare of the speed ,so that at very low speeds it can be
very ineffective. A pleuger rudder incorporates a
submersible electrically driven propeller which can be run
when the main propulsion is at rest . In order to attain
maximum effect and manoeuvre the ship at rest the
rudder is able to turn to <!',owing to this normal floating
linkage hunting gear cannot be used, and a special cam
hunting gear used. ;or normal course keeping the angle is
limited to 43',and a warning signal initiated if exceeded.
THE VITH SCHNEIDER PRPELLR
&his propeller consists of a series of blades of
aerofoil section which pro)ect vertically downwards from
the ship's hull and rotate about a vertical axis. &he blades
are mounted on axes on a circle around the central axis
and are linked together with a mechanism which can
6
cause them to oscillate so as to provide thrust in any
direction. &he amount of thrust can be varied by varying
the degree of oscillation, thus with the blade assembly
rotating in the same direction, manipulation of the blades
can give ahead or astern thrust, or port and starboard
thrust without an ahead or astern thrust component, or
any angle of port or starboard thrust with ahead or astern
thrust.
&he cycloid motion of the blades can be made to
produce thrust in any direction round the circle of
rotation. &his means that the propeller in addition to
providing the main drive for a ship provides full
manoeuvrability without the need to provide a rudder and
steering gear. &his unusual degree of control is of
particular value for special craft or floating e.uipment
such as floating cranes or drilling ships which must be
kept in position.
&he location of the propeller depends upon the
particular application and it can be placed where the
maximum desired effect can be achieved.
"ET FLAP RUDDER
Another device which is being investigated at the
=.P.6. is the )et flap rudder. In the trailing edge of an
otherwise conventional rudder, a fluidic switch is fitted,
which can direct a )et of water to port or starboard. &he
water is pumped into the hollow rudder through a hollow
rudder stock.
7
7onsiderable increase in manoeuvrability is
claimed, especially at low speeds.
RTATING C#LINDER RUDDERS
&his is a device to make a ship e.ually
manoeuvrable at all speeds and was developed in the >.0
by the 2hip ?ivision of the =ational Physical 6aboratory
,=.P.6.-.
A normal rudder is effective up to angles of about
43', after which the flow over the rudder stalls in a
manner similar to that over an aeroplane wing at high
angles of incidence. &here are various methods of
preventing this from occurring and they all involve feeding
energy into the stream of fluid ad)acent to the rudder or
aerofoil surface. &his is called boundary layer control. 1ne
such method is to rotate a cylinder at the leading edge of
the section at such a speed that the rudder can be put
over to <!' without stall, and this is the basic principle of
operation of the rotating cylinder rudder. It is, of course,
necessary to reverse the direction of rotation of the
8
cylinder depending on whether the rudder is put to port or
starboard, and such a system can be fitted to almost any
type of rudder, balanced or unbalanced.
&he ma)or advantage of putting a rudder over to
such a high angle is that the flow from the main engines
may be deflected through a much larger angle than with a
conventional rudder, and static side thrusts of over 3! per
cent of the bollard pull have been measured. Another
main advantage is that its effect is independent of forward
speed and it works as effectively at #ero as at full speed.
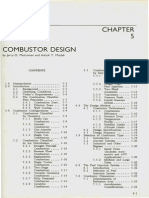
Sc$%ll%n& Rudder
Bec'er (la)
&he flap is attached to the hull. As the rudder rotates
the flap is turned in an same direction increasing the
aerofoil shape and thereby increasing lift.
9
&his system can be used at very large rudder
angles giving side thrust capabilities
MANEUVRABILIT# AND STPPING
&he problems of improving the manoeuvrability and
braking of ships is of increasing importance as they
increase in si#e. 1ne device which is being tried out to
improve stopping power is to arrange the control of twin
rudders so that they move outboard simultaneously. &his
involves two separate steering gears, one for each rudder,
the movement of which must be synchronised for normal
steering.
+ith twin rudder ships the inner rudder on a turn
must turn through a greater angle than the outer . &his is
achieved by having the tiller arm at an angle to the center
10
line of the rudder . It is also possible to slightly angle the
rudders either in or out to increase propulsive efficiency.
Pu*)s su%+able (,r s+eer%n& &ear sys+e*s
Pumps used for supplying the working fluid to the main
steering gear can be of either the variable capacity
reversible delivery type or the fixed delivery non%
reversible type. ;or large capacity outputs with high rates
of change in demand, the variable capacity pumps are
normally fitted. &hese are of two main types, the @ele%
2haw variable stroke pump having radial cylinders and the
swash plate variable stroke pump having axial cylinders.
Hele-S$a. Pu*)
6eft shows the construction and operation of this
type of pump which is normally driven by a constant
speed electric motor. &he pistons are fitted in a row of
radial cylinders and through the outer end of each piston
is a gudgeon pin , which attaches the slippers to the
piston. &he slippers are free to oscillate on their gudgeon
pins and fit into circular grooves in the circular floating
11
ring . &his ring is free to rotate being mounted on ball
bearings , which are housed in guide blocks , this reduces
oil churning and friction losses. &he latter bear on tracks
are controlled by the actuating spindles, which passes
through the pump casing. &he movement of the floating
ring by the actuating control spindle ,operated by, say,
the telemotor receiver- from the central position causes
pistons to reciprocate in the radial cylinders so that a
pumping action takes place. &he direction of the pumping
depends upon whether the movement is to the left or
right of the central or neutral position.
&he action of the pump is shown above.
It should be noted that an advantage with this
system is that in reversing the direction of the flow of
fluid, the pump moves from maximum delivery in one
direction across to #ero delivery then through #ero
delivery to maximum delivery in the opposite direction.
&he build up in fluid pressure taking place without shock
loading of pipe lines supplying fluid to the main steering
unit.
&he pump is usually provided with an odd number
of cylinders, usually seven or nine, which produces more
even hydraulic flow and a better balanced pump.
Var%able S+r,'e Re/ers%ble S.as$)la+e Pu*)
12
&his pump is sometimes called the variable stroke
gear pump ,5.2.A-, it runs in the flooded condition, the
make up tank being above the level of the pump so that
all the working parts are immersed in oil. It is driven by a
constant speed electric motor the volume and direction of
the oil flow being controlled by means of a stroke control
lever.
&he 52A pump is stated to have some
advantages over the @ele%2haw , this is due to the fact
that the c of g of the @ele 2haw plungers is a relatively
large distance from the centre of rotation operating
relatively large centrifugal forces . &he 52A plunges have
13
a c of g close to the centre of rotation creating relatively
small centrifugal forces, this means that the 52A system
can be run at much higher speeds and therefore can be
much smaller whilst doing the same work as the @ele%
2haw. ?ue to centrifugal forces acting, the wear on the
5.2.A. pump pistons can be greater than that for the
radial type pistons &here is a small clearance between the
valve and cylinder blocks when running off load. +hen the
unit comes on stroke the hydraulic pressure forces the
two faces together.
Bxternal pipes connect ports to steering gear.
52A pumps and @ele%2haw pumps have an odd
number of cylinders since calculation shows that this gives
better hydrodynamic balancing ,and a better starting
tor.ue when used in a pump driving hydraulic motor-.
Au0%l%ary Pu*)
2ome manufacturers supply an auxiliary pump driven
from the main pump shaft, which draws oil from the
replenishment tank, delivering through non return valves
to each side of the main hydraulic system. A low pressure
relief valve opens to return the auxiliary pump delivery
back to the replenishment tank if the main system is full,
at the same time keeping e.uivalent initial pressure on
the whole system. &his ensures the lubrication of the main
pumps when at no stroke and resists the ingress of air
into the system. Pressure from this pump can also be
used to power the automatic helmsman control, to
operate change over valves, or to power servo control
units which in large installations may be used to operate
pump stroke mechanisms and so reduce the force
re.uired from the telemotor.
C,ns+an+ Pressure Pu*)s
&he constant pressure delivery pump is a standard
production line , cheap pump( it runs constantly delivering
a set volume of li.uid whose pressure must be
regulated .Recirculating v*v's allow oil to by%pass rams
14
when stationary, an oil cooler may have to be
incorporated.
5alves must be incorporated to divert the flow of
oil to one side or the other. &hese normally take the form
of electrically operated solenoid valves which are sub)ect
to wear, as well as damage to seats and solenoid coils.
2hock loading to rams and pipework causing
noise and vibration as well as damage.
Rudder Carr%er bear%n&s
&he rudder carrier bearing takes the weight of the
rudder on a grease lubricated thrust face. &he rudder
stock is located by the )ournal, also grease lubricated.
2upport for the bearing is provided by a doubler plate and
steel chock. &he base of the carrier bearing is located by
wsdge type side chocks, welded to the deck stiffening.
&he carrier is of meehanite with a gunmetal thrust ring
and bush. 7arrier bearing components are split as
necessary for removal or replacement. 2crew down
15
lubricators are fitted, and the grease used for lubrication
is of a water resistant type ,calcium soap based with
graphite-.
A small allowance is made for weardown, which
must be periodically checked. &he rudder is prevented
from )umping by rudder stops welded onto the stern
frame.
Rudder s+,)s
Rudder stops are arranged as follows(
An&le (r,*
cen+rel%ne
P,s%+%,n ,(
s+,)
N,+e
43
1n telemotor
system
=ormal limit
4C 1n steering gear
Prevents rudder striking
external stops
4<
Bxternal, on
stern frame
emergency stop to
protect propeller
Cr%+%cal )r,(%l%n& ,( carr%er bear%n&
Reas,ns (,r cr%+%cal c,n+,ur%n& ,( +$rus+ (ace1
i. for lubrication
16
ii. conical in order to prevent side slip and
centralise rudder
iii. projected area gives greater bearing area
allowing smaller diameter bearing
S+eer%n& &ear
A hydraulic steering gear consists of a bridge control
which applies helm, an engine control which is operated
)ointly by the helm and hunting gear ,when fitted- and a
power pump and rudder actuator which constitutes the
steering engine.
Tele*,+,r sys+e*s
&he telemotor system consists of a transmitter on the
bridge and a receiver fitted on the steering gear forming a
part of the hunting gear. &he system may be electrical or
hydraulic or a combination of the two.
$ost modern vessels are fitted with electric or
electro%hydraulic systems. ?ue to the increasing si#e of
vessels pipe runs have lengthen causing lags in the
operation of the receiver in hydraulic systems. In addition
hydraulic only systems generally re.uire more
maintenance.
Hydraul%c +rans*%++er
17
2hown above is a typical hydraulic transmitter
unit. &he pinion driving the pistons is turned by the bridge
wheel.
&he casing is usually gun metal, with bron#e
rams, and copper pipes are led in by frilled leads on the
casting.
&o test the system, with the steering gear
actuating pumps stopped, the wheel may be lashed at
hard over and the pressure recorded. It should maintain
this pressure for some time
&o allow for expansion in the system and to allow
topping up a 'by%pass valve' is fitted. It will also act as a
safety valve.
Author note:
The main problem appears to be the effect of air
entrained within it. Thus regular venting of the system is
required.
By-pass valve
18
&he operating rod is pushed down making both
line common whenever the wheel is at midships, generally
by a cam fitted to the pinion. &his ensures they system is
always balanced.
&he charging valves are opened only when filling
or flushing.
&he moving cylinder is attached to the hunting
gear. +hen the bridge wheel is turned hydraulic pressure
acts on the cylinder causing it to move. &his in turn moves
the hunting gear. &he steering gear is then moved to
compensate until the hunting gear is moved back to the
neutral position. &he total movement of the receiver is
limited by stops.
19
Elec+r,-$ydraul%c +y)e +ele*,+,r sys+e*
2hown is a very simple system capable of
operating a steering hunting gear. A pressure relief valve
would normally be fitted after the valve and across the
pump to prevent over pressurisation of the system.
&he signal is derived from the action on the
steering wheel, created by the autopilot or directly from
the non%follow up control levers.
Tele*,+,r (lu%d
s$,uld be a &,,d 2ual%+y *%neral ,%l .%+$ +$e
(,ll,.%n& )r,)er+%es1
i. low pour point
ii. non sludge forming
iii. non corrosive
iv. good lubricating properties
v. high flash point
vi. low viscosity
Hun+%n& Gear
20
&he steering gear system above consists of the
telemotor which receives a signal from the bridge wheel.
&his acts on the hunting gear.
&he hunting gear moves displacing a control rod,
this rod acts on the pump displacement control gear to
alter the delivery from the pump. &he delivery from the
pump causes the ram to move rotating the rudder stock
and hence the rudder. &he other end of the hunting gear
is mounted on the rudder stock.
&he rotation of the rudder stock moves the
hunting gear returning the operating rod for the pump to
the neutral position once the rudder has reached the
correct angle.
Rudder Ac+ua+,rs
21
&here are many different mechanisms by means of which
hydraulic power can be converted into tor.ue at the
rudder stock some of which are as follows(
Ra)s,n Sl%de Ac+ua+,rs - Ra* +y)e
2teering gear incorporating the rapson slide
principle are the most common in use on heavy duty
applications.
&he rapson slide acting on either a fork tiller or
the more common round arm. &he tiller drives the rudder
stock by means of a key or keys. &he crosshead is free to
slide along the circular arm of the tiller so that the straight
line effort of the rams is applied to the angular moving
tiller. Bach set of two cylinders in line are connected by a
strong steel girder usually called a DEoistD which stiffens
the system and forms a Dguide barD for the crosshead
guide slippers to slide along. &he )oist is often designed to
incorporate the steering engine stops.
An important consideration in all steering gears is
the Dwear downD of the rudder carrying bearing, this
bearing takes all the weight of the rudder. &herefore there
must be ade.uate clearance between the bottom of the
tiller and the crosshead bearing, so as the rudder bearing
wears down in service the tiller and crosshead bearing do
not touch, clearance when new can be 22 mm at bottom
and 92 mm at top( the top clearance is a precaution to
22
stop the tiller bumping up the steering rams in the
unlikely event of the rudder lifting in heavy weather.
2hould the bottom of the tiller and the crosshead bearing
touch, then the weight of the rudder will be transferred
from the rudder bearing to the steering rams with
disastrous results such as leaking of working fluid from
the cylinders and shearing of the rams.
In the case of forked tiller design, the thrust from
the rams is transmitted to the tiller through swivel blocks.
1ne advantage of this arrangement is that the overall
length of pairs of rams is reduced compared to the round
arm tiller design and this can be an important
consideration in some cases. A disadvantage is that where
as any slight misalignment in the case of the round arm
tiller is not vitally important, it could lead to uneven
loading of the swivel blocks in the forked tiller design and
it is essential that the line of the rams be exactly at right
angles to the rudder stock centre line if this is to be
avoided.
+ith the Rapson 2lide the tor.ue reaction from
the rudder is taken on the tiller by a force which is
balanced by an e.ual and opposite force having two
components one of which is produced by the ram and acts
in the line of the ram, whilst the other is at right angles to
the line of the ram and is produced by the guide reaction.
23
+here guides are not fitted as is sometimes the
case with smaller steering gears then the guide reaction
force must be carried by bearings or the glands of the
cylinders.
a F actuator area
p F +orking fluid pressure
n F =umber of effective rams , 9 for 2 ram, 2 for ram-
. F rudder angle
r F tiller radius at amidships
r' F tiller radius at .
o
of tiller helm
s F guide reaction force
f F force on ram with tiller amidships , F p x a-
f' F effective force acting at <!
o
to tiller
r' F r * cos.. also f' F f * cos.. F p x a * cos..
t F tor.ue available F f' x r' x n
F ,,p x a- * cos.-. ,r * cos..- . n
t F ,p x a x n x r- . ,9 * cos.2.-
2howing that the rapson slide effect which gives
increase of available tor.ue with increases of rudder angle
&he tor.ue demanded from the steering gear
increases and is at a maximum at maximum rudder angle
when the mechanical advantage of the Rapson 2lide gear
is at a maximum. Ram type gears are also well adapted to
take advantage of the high pressures which are currently
available, since ram diameters and casing are relatively
small and leakage paths are small or non%existent.
sc%lla+%n& Cyl%nder Ac+ua+,rs
&he use of oscillating cylinders or pinned actuators is a
recent development. &hey can be used as single cylinder
units for hand only steering or two cylinder units for hand
and power steering. +hile four double acting cylinders can
cope with larger tor.ue demands. &hese units are double
acting because pistons work in the cylinders and pressure
can be applied to either side as compared with ram gears
which are single acting.
24
In these cases, the tor.ue & applied to the rudder
stock varies with the rudder deflection angle and on the
location of the actuator. In general the tor.ue developed
will be less at the maximum rudder angle than the
maximum possible from the actuator.
$aximum tor.ue from actuator F p.a.n.r.
&or.ue at 43
o
F p.a.n.r. cos ,43 F o-
where o F angle traced out by the actuator
between o F !
o
and o F 43
o
$echanical advantage at 43
o
F 7os 43
o
F !.G2
since the actuators are pivoting about their pin centre,
they usually have their working fluid tank and pump
mounted on the actuator cylinder, or they are connected
to tank and pump by a flexible pipeline.
Ra*s C,nnec+ed T, Cr,ss$eads By L%n's
&his type of gear is used if the athwartships space is
limited, or the head room at the rudder head is restricted,
as for example, in the case of a vehicle ferry having a slip
way aft. &he design enables the steering gear to be
moved forward where there is reasonable head room for
access.
As in the case of the oscillating cylinder design
the $echanical Advantage of the Rapson 2lide gear is lost
in the links and the tor.ue output of the gear is at a
minimum at hard over when the tor.ue demand created
by the rudder hydrodynamic forces is at a maximum.
R,+ary Vane Gear
T$ese c,ns%s+ ,( +., ele*en+s3
1. a cylindrical static casing (stator) with
usually three internal vanes which
project radially inwards
2. a rotor keyed to and concentric with the
rudder stock, the rotor has rotor vanes
which project radially outwards into the
spaces formed by the stator vanes.
25
T$e s)aces (,r*ed be+.een +$e s+a+,r and
r,+,r /anes are used as $%&$ and l,.
)ressure c$a*bers4 T$e *a%n ad/an+a&e ,(
+$e sys+e* %s +$a+ %+ %s c,*)ac+5 ,ccu)y%n&
ab,u+ 6 7 68 +$e s)ace ,( a ra* sys+e*4 T$e
d%sad/an+a&es are 1
1. it has a long oil sealing path
2. it is a constant torque machine at all
angles of helm compared to the ram
system where due to the apson slide
effect, the torque available increases
with increasing helm.
+here 9!!" redundancy is re.uired two rotary
vanes in piggy back are used.
All vanes are spheroidal graphite cast iron
secured to the cast iron rotor and stator by high tensile
steel dowel pins and cap screws. Rotor strength is
maintained by keys fitted full length of the rotary vane.
2teel sealing strips are fitted along the working faces,
backed by synthetic rubber in grooves along the working
faces which are elastically loaded, so as to ensure that
contact with the mating surfaces is maintained in order to
hold the hydraulic pressures.
26
&he chambers are alternately connected to the
suction and delivery from the hydraulic pump so that they
can be used to produce the rudder actuating tor.ue.
8ecause the distribution of the pressure chambers is
balanced around the rudder stock, only pure tor.ue is
transmitted to the stock and no side loading are imposed
by the gear.
&here are two main types of rotary vane steering
gear in use today. 1ne has its stator firmly fixed to the
steering flat deck and the stator housing and cover are
provided with suitable bearings to enable the unit to act
as a combined rudder carrier and rudder stock bearing
support. &he other type of vane gear is supported where
the stator is only anchored to the ships structure to resist
tor.ue but is free to move vertically within the constraints
of the separate rudder head bearing and carrier which is
similar to the bearing provided for ram type steering
gears.
&he rudder carrier ring bearing ,Pallister 8earing-
is taking the weight of the rotary vane steering gear and
the rudder and stock.
27
Rotation of the stator is prevented by means of
two anchor brackets and two anchor bolts . &he anchor
brackets are securely bolted to the stool and vertical
clearance is arranged between the inside of the 2tator
flanges and the top and bottom of the anchor brackets to
allow for vertical movement of the rudder stock. &his
clearance varies with each si#e of rotary unit but could be
about ! mm total . It is essential that the rudder carrier
should be capable of restricting the vertical movements of
the rudder stock to less than this amount.
&he anchor bolts are fitted with special bushes in
halves, shaped externally in order to pre%load the
synthetic rubber shock absorbers , which are fitted
between them and the anchor brackets. &he maximum
deflection of the shock absorbers under full load is
approximately 9 mm.
&he working angle of the gear is governed by the
number of vanes and their thickness. 5anes act as rudder
stops when a moving vane contacts a fixed vane. 5alves
at inlet to the chambers may be shut causing a hydraulic
lock. In the rotary vane units the $echanical Advantage is
unity at all angles and hence tor.ue is constant
&or.ue F p.a.n.r.
where n F number of rotating vanes
Tend(9,rd R,+ary P%s+,n Gear Ac+ua+,r
28
&his gear consists of a casing around the rudder stock
which contains pistons of rectangular section sliding in
angular compartments concentric with the rudder stock.
&he tiller pro)ects into a gap between the cylinder, the
piston ends abutting onto the tiller but not being attached
to it so that axial movements of the rudder cannot be
transmitted to the pistons. 2teering gears of this type
operate at hydraulic pressures up to 9 bar ,:!! lbf*in2-
and are in general restricted to low power application.
As with the rotary vane steering gears the
$echanical Advantage is unity at all angles and hence the
tor.ue is constant.
&or.ue F p.a.n.r.
where n in this case is unity.
C,*),nen+s
Rel%e( Is,la+%n& And By)ass Val/es
@ydraulic actuators are provided with relief and bypass
valves between complementary pairs of cylinders or
chambers of vane gears. &he relief valves are set to lift at
pressures above the normal maximum.
&he bypass valves are normally closed but can be
opened on a two cylinder gear to enable emergency
steering to be used. 1n a four cylinder gear one pair of
cylinders can be bypassed while the other pair provide
emergency steering at a reduced tor.ue, an instruction
plate is fitted over the controls valve block giving a
combination of failures and which valves have to be open
or shut to cope with the emergency etc. It should be
noted that if one ram or cylinder in a four ram system
breaks down, then never isolate the cylinder diagonally
opposite the damaged unit, since the steering gear will
not operate due to the fact that the remaining two
cylinders will be either on all pressure or on all suction at
the same time.
29
Isolating valves are provided at each cylinder or
rotary vane chamber which when closed will hold the
rudder by trapping the oil in the chambers. Isolating
valves are also fitted to pumps so that a pump can be
completely shut off from the circuit and removed for
servicing while steering is continued with the other pump.
In the case of gears with duplicated variable
stroke pumps, in order to be able to bring a standby unit
.uickly into operation, the pump stroke mechanisms are
permanently coupled together and both pumps are left
open to the hydraulic circuit. &hus it is only necessary to
start up a motor for the stand by pump to be operative. It
is usual to run both pumps in restricted navigation waters.
As a variable stroke pump can operate as a motor if
pressure oil is applied to one side while it is on stroke, it is
necessary to prevent wind milling or rotation of the pump
which is on stand by duty.
1therwise, the output of the operation pump,
instead of moving the steering gear would be used up in
rotating the stand by pump.
1ne method to prevent this,is using a fixed
ratchet is provided concentric with the pump driving shaft.
Pawls that can engage this ratchet are carried in the drive
coupling. +hen the pump is on stand%by the pawls engage
with the ratchet and prevent rotation when oil on the
delivery side of the operating pump is on pressure. In this
condition the tendency to motor the stand by pump will
always be against its normal direction of rotation. As soon
as the pump is started, rotation being in the opposite
direction, the pawls disengage and by centrifugal action
fling out against the inner flange of the coupling
completely clear of the ratchet. +hen a pump is on stand%
by and the rudder is being driven by water pressure in the
direction in which it is being moved so as to generate
pressure on what is normally the suction side of the
operating pump, this will cause the stand by pump to
rotate in its normal running direction. &his means that the
pawls will disengage and the pump will be motored round,
30
allowing the rudder to move more .uickly to a new
steering position than the single operating pump will
allow.
Another method of protection against rotation of
the stand by pump is to fit 2ervo pressure operated
automatic change over valves in the pipelines( these
ensure that the pump can only be started in the unloaded
condition ,neutral- and in addition prevents the stand by
pump from being motored by the pump in service.
1n some ships it has been discovered that the
ball bearing races on the stand%by pump have been failing
due to brinelling of the ball bearings, caused by ship
vibrations, and in these cases it is usual to fit devices
which allows the stand by pump to be motored slowly.
+hen fixed delivery pumps are duplicated in
supplying oil to a common hydraulically operated control
valve, an automatic change over valve can be fitted which
will isolate the stand by pump when it is at rest, but will
connect it to the actuator when the pump is started up.
S+,)s And L%*%+ S.%+c$es
Bxternal or stern posts stops are set at the absolute limit
to hard over movement of the rudder , protects propeller
and ship stern in the event of metal or other failure which
allows rudder to swing in an uncontrolled manner.
$echanical stops on the rudder actuator operate before
the external stop are reached .these take the form of
travel limits. 2tops on the bridge control operate before
mechanical stops. local controls are set midway. auto pilot
controls are set first. It should be noted that the vanes act
as stops on rotary vane gears.
Dr%/e Bac' Due T, Hea/y Sea:s
@eavy seas acting on the rudder can force the actuator
against the hydraulics sufficient to lift the relief v*v, in
which case the rudder will move. @unting gear will tend to
return the gear to its correct position.
31
Hand And P,.er Hydraul%c S+eer%n& Gears
;or small ships during navigational course keeping hand
steering can be used, whist during manoeuvring power
steering can be used. &hese may take the form of chains
or simple hydraulics operated by a fixed delivery pump
attached to the steering gears.
;F,ll,. U); S+eer%n&
&his is the normal method of steering and involves the
feedback of steering angle to the helm. &his is suited to
both manual and automatic operation.
&he ships heading may be set into the autopilot
which can then compare the actual to desired heading and
ad)ust the rudder angle to suit
;N,n-(,ll,. U); S+eer%n&
=ormally used for back up purposes only. 7onsists of a
single lever per steering gear unit, by moving the lever in
on direction the rudder will begin to turn, the rudder will
continue to turn until the lever is released or it reaches
the limit of its operation
C$ar&%n& A Sys+e* <%+$ Flu%d
. In all cases high .uality hydraulic oil should be used ,
containing inhibitors against oxidation , foaming, rust and
wear and emulsification.
In order to keep the transmission load as low as
possible when hand steering , hand power systems must
have oil of low viscosity.
&he condition of the oil should be monitored and
ensured at least clean and free of moisture.
S+eer%n& &ear (a%lure
32
A study of steering gear defects demonstrates that the
most common are related to vibration and the working
loose of components.
&he most common source of failure are the pump
and the hydraulic system associated with it.
Rudder +,r2ue calcula+%,ns
;ormulae for assessing rudder tor.ue's are based upon
the expression &a A7p5
2
2in . whereH%
& F rudder tor.ue
7 F rudder area
7p F centre of pressure distance from centre line of
rudder stock
5 F velocity of ship
. F rudder angle measured from mid%ship position
In practice different constants obtained
empirically are used with this expression and take into
account such factors as propeller slip and wake speed as
appropriate depending upon the relation of the rudder and
propeller positions. &he position of the centre of pressure
has a significant effect upon rudder tor.ue and hence the
si#e of the steering gear re.uired( the greater the
distance of the 7 of P from the centre line of the rudder
stock, the larger the tor.ue re.uired( therefore designers
attempt to bring the 7 of P as near to the centre line as
possible. +ith the simple Dbarn doorD type rudder on
some single screw ships, no ad)ustment can be made, but
the semi%balanced and balanced%type rudders can be
designed to reduce the tor.ue re.uired( for instance, with
the spade type rudder such as fitted to twin screw ferries,
the position can be ad)usted by the designer to give
optimum position. &his lies between 4! and 42 per cent
abaft the leading edge of the mean chord of the rudder.
33
2uch a rudder would have its 7 of P forward of the stock
position at low angles of helm, would balance around 9!
o
to 93
o
and drift aft of the stock at higher rudder angles.
In graph above is shown a typical tor.ue
characteristics for a spade type balanced rudder and a
Dbarn doorD or unbalanced plate rudder. &he astern
tor.ue's should also be calculated since this is sometimes
higher than the ahead tor.ue, this is true for spade
rudders.
P<ER
&he peak power that a steering gear must develop is the
product of the maximum tor.ue ,&- usually at hard over
with the ship travelling at full speed, and the maximum
speed ,2- of rudder movement i.e. Power ,max- a & x 2.
&he combination of maximum power and speed
only exists for 2 or 4 seconds during each manoeuvre( so
clearly the average power re.uired to operate the steering
gear is considerably below the peak. 8ecause the steering
gear must have sufficient power to overcome friction and
still have ample reserve of power, the value for used in
the foregoing expression is significantly higher than that
used in the expression for rudder tor.ue. +hen
34
considering the diameter of the rudder stock, bending and
shear stresses must be taken into account.
Rules
?esign of steering gears have been influenced over the
years by the rules and regulations of national authorities
and classification sub)ects. Any changes of real substance
tend nowadays to originate from the international
Mar%+%*e r&an%sa+%,ns=I4M44> c,n/en+%,ns
and re&ula+%,ns4 Class%(%ca+%,n s,c%e+y
re2u%re*en+s are as (,ll,.s1
1. !ll ships to have power operated main
gear capable of displacing the rudder
from "#
o
port to "#
o
starboard at the
deepest draught and at ma$imum
service speed. %ust also be capable of
displacing the rudder from "#
o
port to
"&
o
starboard in 2' seconds and vice
versa.
2. (he au$iliary gear must be power
operated and capable of being brought
rapidly into action. (he au$iliary gear is
only required to steer the ship at either )
knots or half service speed
". *f the main gear comprises two or more
identical power units, then a single
failure of either power unit or piping
must not impair the integrity of the
remaining part of the steering gear
+. ,ach power unit must be served by at
least two electrical circuits from the
main switchboard. -ne circuit may pass
through the emergency switchboard. !ll
circuits to be separated as widely as
possible throughout their length.
35
#. !ll power operated gears to be fitted
with shock relieving arrangements to
protect against the action of heavy seas.
.. !n efficient brake or locking
arrangement to be fitted to enable the
rudder to be maintained stationary
). the ma$imum power developed by the
gear is proportional to ( $ /
where ( 0 rudder torque
/ 0 /peed of rudder movement
also ( 0 ! $ 1 $ sinq $ 22
where ! 0 rudder area
1 0 centre of pressure
q 0 rudder angle
2 0 velocity of the ship
S)ec%al re2u%re*en+s
1wners may specify additional re.uirements such as
faster hard%over to hard%over time, strength of
components above that re.uired by the Rules, additional
control points and additional duplication,
New tankers of 100 000dwt and above-shall comply with the
following
T$e *a%n s+eer%n& &ear s$all c,*)r%se ,(
e%+$er
+., %nde)enden+ and se)ara+e ),.er
ac+ua+%n& sys+e*s eac$ ca)able ,(
*ee+%n& +$e $ard ,/er ),r+ +, ?8
,
s+arb,ard %n @A sec re2u%re*en+s5
,r
a+ leas+ +., %den+%cal ),.er ac+ua+%n&
sys+e*s .$%c$ ac+%n& s%*ul+ane,usly %n
n,r*al ,)era+%,n5 s$all be ca)able ,(
*ee+%n& +$e $ard ,/er re2u%re*en+s4
<$ere necessary +, c,*)ly .%+$ +$%s
re2u%re*en+ %n+er c,nnec+%,n ,(
36
$ydraul%c ),.er sys+e*s s$all be
)r,/%ded4 L,ss ,( $ydraul%c (lu%d (r,* ,ne
sys+e* s$all be ca)able ,( be%n&
de+ec+ed and +$e de(ec+%/e sys+e*
%s,la+ed s, +$a+ +$e ,+$er sys+e* s$all
re*a%n (ully ,)era+%,nal
In the event of loss of steering capability due to a
single failure other than the tiller, .uadrant or
components serving the same purpose ,these are
excluded from single failure concepts-, or sei#ure of the
rudder actuators. &he steering capability shall be regained
in not less than 3 seconds after the loss of one power
actuating system.
2teering gear other than hydraulic should meet the same
standards.
Eample of suitable system permissible for all ships
&he system shown consists of two sets of rams
but could e.ually be two rotary vane units. +ith no power
on the solenoids are in by%pass mode with oil being
allowed to pass freely from one side to the other. +hen
37
an electric motor is started the control pump supplies oil
to the solenoid shutting it. @igh pressure oil from the main
unit is now fed to the rams as re.uired. &he other unit
remains in by%pass until the electric motor is started.
6ow level alarms are fitted to the tanks. 6ow low
changeovers may also be fitted so that in the event of oil
loss from one system, the other system is started.
New tankers between 10 000gt upwards to 100 000tdwt
;or these tankers the single failure criterion need
not apply to the rudder actuator or actuators sub)ect to
certain re.uirements being fulfilled. &hese include a
re.uirement that steering be regained within 3 seconds
following failure of any part of the piping system or power
units and a special stress analysis of non%duplicated
rudder actuators.
&he left hand unit is shown in operation.
;or this basic arrangement the power units must
be identical
38
New ships !0 000gt and upwards
system suitable for all ships except tankers of 9! !!! gt
and above
&he main steering shall comprise two or more
power units and that the main steering gear is so
arranged that, after a single failure in its piping system or
in one of the power units the defect can be isolated so
that steering can be speedily regained.
'2peedily' is intended to mean the provision of
duplicate hydraulic circuits or , for example, a
conventional four ram steering gear with a common
hydraulic circuit with appropriate isolating valves
New ships of less than !0 000 gt and tankers less than 10 000
gt
suitable system
39
2ingle failure is not applicable as a rule, however,
attention is drawn to the re.uirement that auxiliary
steering gear be independent of any part of the main gear
except the tiller. &here is no re.uirement that main and
auxiliary power units be identical.
&he auxiliary steering gear must be capable of
putting the rudder over from 93
o
from one side to the
other in not more than :! seconds with the ship at its
deepest draught and running ahead at half maximum
speed or C knots.
Eisting tankers of "0 000gt and upwards
T$e s+eer%n& &ear s$all be arran&es s, +$a+ %n
+$e e/en+ ,( s%n&le (a%lure ,( +$e )%)%n& ,r ,ne
,( +$e ),.er un%+s5 s+eer%n& ca)ab%l%+y can be
*a%n+a%ned ,r +$e rudder *,/e*en+ can be
l%*%+ed s, +$a+ s+eer%n& ca)ab%l%+y can be
s)eed%ly re&a%ned by
An %nde)enden+ *eans ,( res+ra%n%n& +$e
rudder
40
,r
(as+ ac+%n& /al/es +, %s,la+e +$e ac+ua+,r
,r ac+ua+,rs (r,* +$e e0+ernal $ydraul%c
)%)%n& +,&e+$er .%+$ a *eans ,( d%rec+ly
re(%ll%n& +$e ac+ua+,rs by a (%0ed
%nde)enden+ ),.er )u*) and )%)%n&
sys+e*
,r
An arran&e*en+ s, +$a+5 .$ere $ydraul%c
),.er sys+e*s are %n+erc,nnec+ed any
l,ss ,( $ydraul%c (lu%d (r,* ,ne sys+e*
s$all be de+ec+ed and +$e de(ec+%/e
sys+e* s$u+ ,(( e%+$er au+,*a+%cally ,r
re*,+ely (r,* +$e br%d&e s, +$a+ +$e
,+$er sys+e* re*a%ns %n+ac+
Re2u%re*en+s (,r all ne. s$%)s
Ad*%n%s+ra+%,ns *us+ be sa+%s(%ed %n
res)ec+ +, +$e *a%n and au0%l%ary
s+eer%n& &ear )r,/%ded (,r e/ery s$%)
+$a+ all c,*),nen+s and +$e rudder s+,c'
are ,( s,und c,ns+ruc+%,n
E/ery c,*),nen+5 .$ere a))r,)r%a+e5
u+%l%se an+%-(r%c+%,n bear%n&s .$%c$ .%ll be
)er*anen+ly lubr%ca+ed ,r )r,/%ded .%+$
lubr%can+ (%++%n&s
Par+s sub9ec+ed +, $ydraul%c )ressures
s$,uld be des%&ned +, c,)e .%+$ 64@B
*a0%*u* .,r'%n& )ressure .$en +$e
rudder %s $ard ,/er a+ *a0%*u* drau&$+
and ser/%ce s)eed
s)ec%al re2u%re*en+s (,r (a+%&ue
res%s+ance= due +, )ulsa+%n& $ydraul%c
)ressure>5 rel%e( /al/es and ,%l
cleanl%ness
L,. le/el alar* +, be (%++ed +, eac$
$ydraul%c reser/,%r4
41
F%0ed s+,ra&e ca)ac%+y su((%c%en+ +,
rec$ar&e ,n sys+e*
Au0%l%ary s+eer%n& &ear
&he other set of steering ,auxiliary - may be an
arrangements of blocks and tackles or some other
approved alternative method.
&he auxiliary steering gear need only be capable
of steering the ship at navigable speed, but it must be
capable of being brought speedily in to action in an
emergency. =avigable speed is one half of maximum
service speed ahead or C knots whichever is the greater.
&he auxiliary steering gear must be a power
operated type if the rudder stock exceeds 24!mm for
passenger ships and 23!mm for cargo vessels. =o
additional means of steering is re.uired when electric or
electro%hydraulic steering gear is fitted having two
independent motors or two sets of pumps and motors.
Elec+r%cal Su))ly
2hort circuit protection and overload alarm are to be
provided in steering gear circuits. Indicators for running
indication of steering gear motors are to be installed on
the navigation bridge and at a suitable machinery control
position. Bach electric or electro%hydraulic steering gear
shall be served by at least two independent circuits fed
from the main switchboard. 7ables for each circuit led
through a separate route as far apart as possible so that
damage to one cable does not involve damage to the
other. A change over switch is fitted in an approved
position to enable power supplies to be interchanged. 1ne
circuit may pass through an emergency switchboard.
Rudders
In passenger ships where the rudder stock exceeds
24!mm, an alternative steering position remote from the
main position is to be provided. ;ailure of one system
42
must not render the other system inoperable. Provision
made to transmit orders from bridge to alternative
position. &he exact position of the rudder must be
indicated at principal steering positions. An efficient
braking or locking device must be fitted to the steering
gear to enable the rudder to be held stationary if
necessary. 2pring or hydraulic buffer relief valves fitted in
steering gear system to protect the rudder and steering
gear against shock loading due to heavy seas striking the
rudder. 2uitable stopping arrangements are to be
provided so as to restrict the total travel of the rudder.
2tops or cut outs on the steering gear are arranged so
that it operates on a smaller angle of helm than the
rudder stops.
Rudder res+ra%n+
2ince failure of a single hydraulic circuit can lead to
unrestricted movement of the rudder, tiller and rams,
repair and recharging may not be possible. ?ifficulty
arises with which the speed a restraint whether in the
form of a mechanical or hydraulic brake can be brought in
to use.
?ue to the possibility of considerable damage
occurring before it could, regulations have concentrated
on continuity of steering rather than a shut down and
repair solution
Tes+%n& and dr%lls
a. +ithin 92 h before departure, the ship's steering
gear shall be checked and tested by the ship's
crew. &he test procedure shall include, where
applicable, the operation of the followingH
i. the main steering gear;
ii. the auxiliary steering gear;
iii. the remote steering gear control systems;
iv. the steering positions located on the navigation
bridge;
v. the emergency power supply;
43
vi. the rudder angle indicators in relation to the
actual position of the rudder;
vii. the remote steering gear control system power
failure alarms;
viii. the steering gear power unit failure alarms; and
ix. automatic isolating arrangements and other
automatic equipment.
b. &he checks and tests shall includeH
i. the full movement of the rudder according to
the required capabilities of the steering gear;
ii. a visual inspection of the steering gear and its
connecting linkage; and
iii. the operation of the means of communication
between the navigation bridge and steering
gear compartment.
c.
i. Simple operating instructions with a block
diagram showing the changeover procedures
for remote steering gear control systems and
steering gear power units shall be
permanently displayed on the navigation
bridge and in the steering gear compartment.
ii. All ships! officers concerned with the operation
or maintenance of steering gear shall be
familiar with the operation of the steering
systems fitted on the ship and with the
procedures for changing from one system to
another.
d. In addition to the routine checks and tests
prescribed in paragraphs ,a- and ,b-, emergency
steering drills shall take place at least once every
three months in order to practise emergency
steering procedures. &hese drills shall include
direct control from within the steering gear
compartment, the communications procedure with
the navigation bridge and, where applicable, the
operation of alternative power supplies.
e. &he Administration may waive the re.uirement to
carry out the checks and tests prescribed in
paragraphs ,a- and ,b- for ships which regularly
engage on voyages of short duration. 2uch ships
44
shall carry out these checks and tests at least once
every week.
f. &he date upon which the checks and tests
prescribed in paragraphs ,a- and ,b- are carried
out and the date and details of emergency steering
drills carried out under paragraph ,d-, shall be
recorded in the log%book as may be prescribed by
the Administration.
S+eer%n& &ear re&ula+%,ns
As listed by lloyds
General
646 A))l%ca+%,n
9.9.9 &he re.uirements of this 7hapter apply to the
design and construction of steering gear.
9.9.2 +hilst the re.uirements satisfy the relevant
regulations of the International 7onvention for the 2afety
of 6ife at 2ea 9<C, as amended, and the I$1 Protocol of
9<CG, attention should be given to any relevant statutory
re.uirements of the =ational Authority of the country in
which the ship is to be registered.
9.9.4 7onsideration will be given to other cases, or to
arrangements which are e.uivalent to those re.uired by
the Rules.
64@ De(%n%+%,ns
9.2.9 2teering gear control system means the e.uipment
by which orders are transmitted from the navigating
bridge to the steering gear power units. 2teering gear
control systems comprise transmitters, receivers,
45
hydraulic control pumps and their associated motors,
motor controllers, piping and cables.
9.2.2 $ain steering gear means the machinery, rudder
actuator,s-, the steering gear power units, if any, and
ancillary e.uipment and the means of applying tor.ue to
the rudder stock ,e.g. tiller or .uadrant- necessary for
effecting movement of the rudder for the purpose of
steering the ship under normal service conditions.
9.2.4 2teering gear power unit meansH
,a- in case of electric steering gear, and electric motor
and its associated electrical e.uipment(
,b- in the case of electrohydraulic steering gear, an
electric motor and its associated electrical e.uipment and
connected pump(
,c- in the case of other hydraulic steering gear, a driving
engine and connected pump.
9.2. Auxiliary steering gear means the e.uipment other
than any part of the main steering gear necessary to steer
the ship in the event of failure of the main steering gear
but not including the tiller, .uadrant or components
serving the same purpose.
9.2.3 Power actuating system means the hydraulic
e.uipment provided for supplying power to turn the
rudder stock, comprising a steering gear power unit or
units, together with the associated pipes and fittings, and
a rudder actuator. &he power actuating systems may
share common mechanical components, i.e. tiller
.uadrant and rudder stock, or components serving the
same purpose.
9.2.: $aximum ahead service speed means the maximum
service speed which the ship is designed to maintain, at
the summer load waterline at maximum propeller RP$
and corresponding engine $7R.
46
9.2.C Rudder actuator means the components which
converts directly hydraulic pressure into mechanical action
to move the rudder.
9.2.G $aximum working pressure means the maximum
expected pressure in the system when the steering gear is
operated to comply with 2.9.2,b-.
64? General
9.4.9 &he steering gear is to be secured to the seating by
fitted bolts, and suitable chocking arrangements are to be
provided. &he seating is to be of substantial construction.
9.4.2 &he steering gear compartment is to beH
,a- readily accessible and, as far as practicable, separated
from machinery spaces( and
,b- Provided with suitable arrangements to ensure
working access to steering gear machinery and controls.
&hese arrangements are to include handrails and gratings
or other non%slip surfaces to ensure suitable working
conditions in the event of hydraulic fluid leakage.
64C Plans
9..9 8efore starting construction, the steering gear
machinery plans, specifications and calculations are to be
submitted. &he plans are to giveH
,a- ?etails of scantlings and materials of all load bearing
and tor.ue transmitting components and hydraulic
pressure retaining parts together with proposed rated
tor.ue and all relief valve settings.
,b- 2chematic of the hydraulic system,s-, together with
pipe material, relief valves and working pressures.
,c- ?etails of control and electrical aspects.
47
9..2 &hese plans should give details of scantlings and
materials of the steering gear together with proposed
rated tor.ue and all relief valve settings.
64B Ma+er%als
9.3.9 All the steering gear components and the rudder
stock are to be of sound reliable construction to the
2urveyor's satisfaction.
9.3.2 All components transmitting mechanical forces to
the rudder stock are to be tested according to the
re.uirements of Part 2.
9.3.4 Ram cylinders( pressure housings of rotary vane
type actuators, hydraulic power piping, valves, flanges
and fittings( and all steering gear components
transmitting mechanical forces to the rudder stock ,such
as tillers, .uadrants, or similar components- are to be of
steel or other approved ductile material, duly tested in
accordance with the re.uirements of Part 2. In general,
such material is to have an elongation of not less than 92
per cent nor a tensile strength in excess of :3! =*mm2.
2pecial consideration will be given to the acceptance of
grey cast iron for valve bodies and redundant parts with
low stress levels.
9.3. +here appropriate, consideration will be given to
the acceptance of non%ferrous material.
64D Rudder5 rudder s+,c'5 +%ller and 2uadran+
9.:.9 ;or the re.uirements of rudder and rudder stock,
see Pt 4, 7h 94,2.
9.:.2 ;or the re.uirements of tillers
Per(,r*ance
General
48
2.9.9 >nless the main steering gear comprises two or
more identical power units, in accordance with 2.9. or
G.9.9, every ship is to be provided with a main steering
gear and an auxiliary steering gear in accordance with the
re.uirements of the Rules. &he main steering gear and the
auxiliary steering gear is to be so arranged that the failure
of one of them will not render the other one inoperative.
2.9.2 &he main steering gear and rudder stock is to beH
,a- 1f ade.uate strength and capable of steering the ship
at maximum ahead service speed which shall be
demonstrated in accordance with C.2(
,b- 7apable of putting the rudder over from 43 I on one
side to 43I on the other side with the ship at its deepest
seagoing draught and running ahead at maximum ahead
service speed and under the same conditions, from 43I
on either side to 4!I on the other side in not more than
2G seconds.
,c- 1perated by power where necessary to meet the
re.uirements of ,b- and in any case when the Rules
excluding strengthening for navigation in ice, re.uire a
rudder stock over 92! mm diameter in way of the tiller(
and
,d- 2o designed that they will not be damaged at
maximum astern speed( however, this design re.uirement
need not be proved by trials at maximum astern speed
and maximum rudder angle.
2.9.4 &he auxiliary steering gear is to beH ,a- 1f ade.uate
strength and capable of steering the ship at navigable
speed and of being brought speedily into action in an
emergency(
,b- 7apable of putting the rudder over from 93 I on one
side to 93I on the other side in not more than :! seconds
with the ship at its deepest seagoing draught and running
ahead at one half of the maximum ahead service speed or
C knots, whichever is the greater( and
49
,c- 1perated by power where necessary to meet the
re.uirements of ,b- and in any case when the Rules,
excluding strengthening for navigation in ice, re.uire a
rudder stock over 24! mm diameter in way of the tiller.
2.9. +here the main steering gear comprises two or
more identical power units, an auxiliary steering gear
need not be fitted, provided thatH
,a- In a passenger ship, the main steering gear is capable
of operating the rudder as re.uired by 2.9.2,b- while any
one of the power units is out of operation(
,b- In a cargo ship, the main steering gear is capable of
operating the rudder as re.uired by 2.9.2,b- while
operating with all power units(
,c- &he main steering gear is arranged so that after a
single failure in its piping system or in one of the power
units the defect can be isolated so that steering capability
can be maintained or speedily regained.
2.9.3 $ain and auxiliary steering gear power units are to
beH
,a- Arranged to re%start automatically when power is
restored after power failure(
,b- 7apable of being brought into operation from a
position on the navigating bridge. In the event of a power
failure to any one of the steering gear power units, an
audible and visual alarm is to be given on the navigating
bridge(
,c- Arranged so that transfer between units can be readily
effected.
2.9.: +here the steering gear is so arranged that more
than one power or control system can be simultaneously
operated, the risk of hydraulic locking caused by a single
failure is to be considered.
50
2.9.C A means of communication is to be provided
between the navigating bridge and the steering gear
compartment.
2.9.G 2teering gear, other than of the hydraulic type, will
be accepted provided the standards are considered
e.uivalent to the re.uirements of this 2ection.
2.9.< $anually operated gears are only acceptable when
the operation does not re.uire an effort exceeding 9: kg
under normal conditions.
@4@ Rudder an&le l%*%+ers
2.2.9 Power%operated steering gears are to be provided
with positive arrangements, such as limit switches, for
stopping the gear before the rudder stops are reached.
&hese arrangements are to be synchroni#ed with the gear
itself and not with the steering gear control.
C,ns+ruc+%,n and des%&n
General
4.9.9 Rudder actuators other than those covered by G.4
and the JAuidelines' are to be designed in accordance
with the relevant re.uirements of 7hapter 99 for 7lass I
pressure vessels ,notwithstanding any exemptions for
hydraulic cylinders-.
4.9.2 Accumulators, if fitted, are to comply with the
relevant re.uirements of 7hapter 99.
4.9.4 &he welding details and welding procedures are to
be approved. All welded )oints within the pressure
boundary of a rudder actuator or connecting parts
transmitting mechanical loads are to be full penetration
type or of e.uivalent strength.
4.9. &he construction is to be such as to minimi#e local
concentrations of stress.
51
4.9.3 &he design pressure for calculations to determine
the scantlings of piping and other steering gear
components sub)ected to internal hydraulic pressure shall
be at least 9,23 times the maximum working pressure to
be expected under the operational conditions specified in
2.9.2,b- taking into account any pressure which may exist
in the low pressure side of the system. ;atigue criteria
may be applied for the design of piping and components,
taking into account pulsating pressures due to dynamic
loads, see 2ection <.
4.9.: ;or the rudder actuator, the permissible primary
general membrane stress is not to exceed the lower of the
values determined by calculation for the materialH
,
?4@ C,*),nen+s
4.2.9 2pecial consideration is to be given to the suitability
of any essential component which is not duplicated. Any
such essential component shall, where appropriate, utili#e
anti%friction bearings such as ball bearings, roller bearings
or sleeve bearings which shall be permanently lubricated
or provided with lubrication fittings.
4.2.2 All steering gear components transmitting
mechanical forces to the rudder stock, which are not
protected against overload by structural rudder stops or
mechanical buffers, are to have a strength at least
e.uivalent to that of the rudder stock in way of the tiller.
4.2.4 Actuator oil seals between non%moving parts,
forming part of the external pressure boundary, are to be
of the metal upon metal type or of an e.uivalent type.
4.2. Actuator oil seals between moving parts, forming
part of the external pressure boundary, are to be
duplicated, so that the failure of one seal does not render
the actuator inoperative. Alternative arrangements
providing e.uivalent protection against leakage may be
accepted.
52
4.2.3 Piping, )oints, valves, flanges and other fittings are
to comply within the re.uirements of 7hapter 92 for 7lass
I piping systems components. &he design pressure is to
be in accordance with 4.9.3.
4.2.: @ydraulic power operated steering gear are to be
provided with the following H
,a- Arrangements to maintain the cleanliness of the
hydraulic fluid taking into consideration the type and
design of the hydraulic system(
,b- A fixed storage tank having sufficient capacity to
recharge at least one power actuating system including
the reservoir, where the main steering gear is re.uired to
be power operated. &he storage tank is to be permanently
connected by piping in such a manner that the hydraulic
systems can be readily recharged from a position within
the steering gear compartment and provided with a
contents gauge.
?4? Val/e and rel%e( /al/e arran&e*en+s
4.4.9 ;or vessels with non%duplicated actuators, isolating
valves are to be fitted at the connection of pipes to the
actuator, and are to be directly fitted on the actuator.
4.4.2 Arrangements for bleeding air from the hydraulic
system are to be provided, where necessary.
4.4.4 Relief valves are to be fitted to any part of the
hydraulic system which can be isolated and in which
pressure can be generated from the power source or from
external forces. &he settings of the relief valves is not to
exceed the design pressure. &he valves are to be of
ade.uate si#e and so arranged as to avoid an undue rise
in pressure above the design pressure.
4.4. Relief valves for protecting any part of the hydraulic
system which can be isolated, as re.uired by 4.4.4 are to
comply with the followingH
53
,a- &he setting pressure is not to be less than 9,23 times
the maximum working pressure.
,b- the minimum discharge capacity of the relief valve,s-
is not to be less than 99! per cent of the total capacity of
the pumps which can deliver through it ,them-. >nder
such conditions the rise in pressure. is not to exceed 9!
per cent of the setting pressure. In this regard, due
consideration is to be given to extreme foreseen ambient
conditions in respect of oil viscosity.
?4C Fle0%ble $,ses
4..9 @ose assemblies approved by 6R may be installed
between two points where flexibility is re.uired but are
not to be sub)ected to torsional deflection ,twisting- under
normal operating conditions. In general, the hose should
be limited to the length necessary to provide for flexibility
and for proper operation of machinery, see also 7h 92,C.
4..2 @oses should be high pressure hydraulic hoses
according to recogni#ed standards and suitable for the
fluids, pressures, temperatures and ambient conditions in
.uestion.
4..4 8urst pressure of hoses is to be not less than four
times the design pressure.
S+eer%n& c,n+r,l sys+e*s
C46 General
.9.9 2teering gear control is to be providedH
,a- ;or the main steering gear, both on the navigating
bridge and in the steering gear compartment(
,b- +here the main steering gear is arranged according to
2.9., by two independent control systems, both operable
from the navigating bridge. &his does not re.uire
duplication of the steering wheel or steering lever. +here
the control system consists of a hydraulic telemotor, a
54
second independent system need not be fitted, except in a
tanker, chemical tanker or gas carrier of 9! !!! gross
tonnage and upwards(
,c- ;or the auxiliary steering gear, in the steering gear
compartment and, if power operated, it shall also be
operable from the navigating bridge and is to be
independent of the control system for the main steering
gear.
,d- +here the steering gear is so arranged that more than
one control system can be simultaneously operated, the
risk of hydraulic locking caused by single failure is to be
considered.
.9.2 Any main and auxiliary steering gear control system
operable from the navigating bridge is to comply with the
followingH
,a- $eans are to be provided in the steering gear
compartment for disconnecting any control system
operable from the navigating bridge from the steering
gear it serves(
,b- &he system is to be capable of being brought into
operation from a position on the navigating bridge.
.9.4 &he angular position of the rudder shallH
,a- If the main steering gear is power operated, be
indicated on the navigating bridge. &he rudder angle
indication is to be independent of the steering gear control
system(
,b- 8e recogni#able in the steering gear compartment.
.9. Appropriate operating instructions with a block
diagram showing the change%over procedures for steering
gear control systems and steering gear actuating systems
are to be permanently displayed in the wheelhouse and in
the steering gear compartment.
55
.9.3 +here the system failure alarms for hydraulic lock
,see &able 9<.3.9- are provided, appropriate instructions
shall be placed on the navigating bridge to shutdown the
system at fault.
Sec+%,n B Elec+r%c ),.er c%rcu%+s5 elec+r%c c,n+r,l
c%rcu%+s5 *,n%+,r%n& and alar*s
B46 Elec+r%c ),.er c%rcu%+s
3.9.9 2hort circuit protection, an overload alarm and, in
the case of polyphase circuits, an alarm to indicate single
phasing is to be provided for each main and auxiliary
motor circuit. Protective devices are to operate at not less
than twice the full load current of the motor or circuit
protected and are to allow excess current to pass during
the normal accelerating period of the motors.
3.9.2 Indicators for running indication of each main and
auxiliary motor are to be installed on the navigating
bridge and at a suitable main machinery control position.
3.9.4 &wo exclusive circuits are to be provided for each
electric or electrohydraulic steering gear arrangement
consisting of one or more electric motors.
3.9. Bach of these circuits is to be fed from the main
switchboard. 1ne of these circuits may pass through the
emergency switchboard.
3.9.3 1ne of these circuits may be connected to the motor
of an associated auxiliary electric or electrohydraulic
power unit.
3.9.: Bach of these circuits is to have ade.uate capacity
to supply all the motors which can be connected to it and
which can operate simultaneously. 3.9.C &hese circuits are
to be separated throughout their length as widely as is
practicable.
3.9.G In ships of less than 9:!! gross tonnage, if an
auxiliary steering gear is not electrically powered or is
56
powered by an electric motor primarily intended for other
services, the main steering gear may be fed by one circuit
from the main switchboard. 7onsideration would be given
to other protective arrangements than described in 3.9.9,
for such a motor primarily intended for other services.
B4@ Elec+r%c c,n+r,l c%rcu%+s
3.2.9 Blectric control systems are to be independent and
separated as far as is practicable throughout their length.
3.2.2 Bach main and auxiliary electric control system
which is to be operated from the navigating bridge is to
comply with the followingH
,a- It is to be served with electric power by a separate
circuit supplied from the associated steering gear power
circuit, from a point within the steering gear
compartment, or directly from the same section of
switchboard busbars, main or emergency, to which the
associated steering gear power circuit is connected.
,b- Bach separate circuit is to be provided with short
circuit protection only.
B4? M,n%+,r%n& and alar*s
3.4.9 Alarms and monitoring re.uirements are indicated in
3.4.2 and &able 9<.3.9.
3.4.2 All alarms associated with steering gear faults are to
be indicated on the navigating bridge and in accordance
with the alarm system specified by Pt :, 7h 9,2.4.
Sec+%,n D E*er&ency ),.er
D46 General
:.9.9 +here the rudder stock is re.uired to be over 24!
mm diameter in way of the tiller, excluding strengthening
for navigation in ice, an alternative power supply,
sufficient at least to supply the steering gear power unit
57
which complies with the re.uirements of 2.9.4 and also its
associated control system and the rudder angle indicator,
shall be provided automatically, within 3 seconds, either
from the emergency source of electrical power or from an
independent source of power located in the steering gear
compartment. &his independent source of power shall be
used only for this purpose.
:.9.2 In every ship of 9!!!! gross tonnage and upwards,
the alternative power supply shall have a capacity for at
least 4! minutes of continuous operation and in any other
ship for at least 9! minutes.
:.9.4 +here the alternative power source is a generator,
or an engine driven pump, starting arrangements are to
comply with the re.uirements relating to the starting
arrangements of emergency generators.
Sec+%,n E Tes+%n& and +r%als
E46 Tes+%n&
C.9.9 &he re.uirements of the Rules relating to the testing
of 7lass 9 pressure vessels, piping, and related fittings
including hydraulic testing apply.
C.9.2 After installation on board the vessel the steering
gear is to be sub)ected to the re.uired hydrostatic and
running tests.
C.9.4 Bach type of power unit pump is to be sub)ected to
a type test. &he type test shall be for a duration of not
less than 9!! hours, the test arrangements are to be such
that the pump may run in idling conditions, and at
maximum delivery capacity at maximum working
pressure. ?uring the test, idling periods are to be
alternated with periods at maximum delivery capacity at
maximum working pressure. &he passage from one
condition to another should occur at least as .uickly as on
board. ?uring the whole test no abnormal heating,
excessive vibration or other irregularities are permitted.
After the test, the pump is to be opened out and
58
inspected. &ype tests may be waived for a power unit
which has been proven to be reliable in marine service.
E4@ Tr%als
C.2.9 &he steering gear is to be tried out on the trial trip
in order to demonstrate to the 2urveyor's satisfaction that
the re.uirements of the Rules have been met. &he trial is
to include the operation of the followingH
,a- &he steering gear, including demonstration of the
performances re.uired by 2.9.2,b- and 2.9.4,b-. ;or the
main steering gear trial, the propeller pitch of controllable
pitch propellers is to be at the maximum design pitch
approved for the maximum continuous ahead RP$. If the
vessel cannot be tested at the deepest draught,
alternative trial conditions may be specially considered. In
this case, for the main steering gear trial, the speed of the
ship corresponding to the maximum continuous
revolutions of the main engine should apply(
,b- &he steering gear power units, including transfer
between steering gear power units(
,c- &he isolation of one power actuating system, checking
the time for regaining steering capability(
,d- &he hydraulic fluid recharging system(
,e- &he emergency power supply re.uired by :.9.9(
,f- &he steering gear controls, including transfer of control
and local control(
,g- &he means of communication between the steering
gear compartment and the wheelhouse, also the engine
room, if applicable(
,h- &he alarms and indicators.
,)- +here the steering gear is designed to avoid hydraulic
locking this feature shall be demonstrated.
59
&est items ,d-, ,g-, ,h- and ,)- may be effected at the
dockside.
Sec+%,n A Add%+%,nal re2u%re*en+s
A46 F,r +an'ers5 c$e*%cal +an'ers5 ,r &as carr%ers ,(
68 888 +,ns &r,ss and u).ards and e/ery ,+$er s$%)
,( E8 888 +,ns &r,ss and u).ards
G.9.9 &he main steering gear is to comprise two or more
identical power units complying with provisions of 2.9..
A4@ F,r +an'ers5 c$e*%cal +an'ers ,r &as carr%ers ,(
68 888 +,ns &r,ss and u).ards
G.2.9 2ub)ect to G.4 the following are to be complied withH
,a- &he main steering gear is to be so arranged that in the
event of loss of steering capability due to a single failure
in any part of one of the power actuating systems of the
main steering gear, excluding the tiller, .uadrant or
components serving the same purpose, or sei#ure of the
rudder actuators, steering capability is to be regained in
not more than 3 seconds after the loss of one power
actuating system.
,b- &he main steering gear is to comprise eitherH
,i- two independent and separate power actuating
systems, each capable of meeting the re.uirements of
2.9.2,b-( or
,ii- at least two identical power actuating systems which,
acting simultaneously in normal operation, are capable of
meeting the re.uirements of 2.9.2,b-. +here necessary to
comply with these re.uirements, inter%connection of
hydraulic power actuating systems is to be provided. 6oss
of hydraulic fluid from one system is to be capable of
being detected and the defective system automatically
isolated so that the other actuating system or systems
remain fully operational.
60
,c- 2teering gears other than of the hydraulic type are to
achieve e.uivalent standards.
A4? F,r +an'ers5 c$e*%cal +an'ers ,r &as carr%ers ,(
68 888 +,ns &r,ss and u).ards bu+ ,( less +$an 688
888 +,ns dead.e%&$+
G.4.9 2olutions other than those set out in G.2.9 which
need not apply the single failure criterion to the rudder
actuator or actuators, may be permitted provided that an
e.uivalent safety standard is achieved and thatH
,a- ;ollowing loss of steering capability due to a single
failure of any part of the piping system or in one of the
power units, steering capability is regained within 3
seconds( and
,b- +here the steering gear includes only a single rudder
actuator special consideration is given to stress analysis
for the design including fatigue analysis and fracture
mechanics analysis, as appropriate, the material used, the
installation of sealing arrangements and the testing and
inspection and provision of effective maintenance. In
consideration of the foregoing, regard will be given to the
JAuidelines' in 2ection <.
G.4.2 $anufacturers of steering gear who intend their
product to comply with the re.uirements of the
JAuidelines' are to submit full details when plans are
forwarded for approval.
Sec+%,n F GGu%del%nes: (,r +$e acce)+ance ,( n,n-
du)l%ca+ed rudder ac+ua+,rs (,r +an'ers5 c$e*%cal
+an'ers and &as carr%ers ,( 68 888 +,ns &r,ss and
u).ards bu+ ,( less +$an 688 888 +,ns dead.e%&$+
F46 Ma+er%als
<.9.9 Parts sub)ect to internal hydraulic pressure or
transmitting mechanical forces to the rudder%stock are to
be made of duly tested ductile materials complying with
recogni#ed standards. $aterials for pressure retaining
61
components are to be in accordance with recogni#ed
pressure vessel standards. &hese materials are not to
have an elongation less than 92 per cent nor a tensile
strength in excess of :3! =*mm2.
F4@ Des%&n
<.2.9 ?esign pressure. &he design pressure should be
assumed to be at least e.ual to the greater of the
followingH
,a- 9,23 times the maximum working pressure to be
expected under the operating conditions re.uired in
2.9.2,b-.
,b- &he relief valve,s- setting.
<.2.2 Analysis. In order to analyse the design the
following are re.uiredH
,a- &he manufacturers of rudder actuators should submit
detailed calculations showing the suitability of the design
for the intended service.
,b- A detailed stress analysis of pressure retaining parts of
the actuator should be carried out to determine the
stresses at the design pressure.
,c- +here considered necessary because of the design
complexity or manufacturing procedures, a fatigue
analysis and fracture mechanics analysis may be re.uired.
In connection with these analyses, all foreseen dynamic
loads should be taken into account. Bxperimental stress
analysis may be re.uired in addition to, or in lieu of,
theoretical calculations depending upon the complexity of
the design.
<.2.4 ?ynamic loads for fatigue and fracture mechanics
analysis. &he assumption for dynamic loading for fatigue
and fracture mechanics analysis where re.uired by 4.9.3,
G.4 and <.2.2 are to be submitted for appraisal. 8oth the
62
case of high cycle and cumulative fatigue are to be
considered.
<.2. Allowable stresses. ;or the purpose of determining
the general scantlings of parts of rudder actuators sub)ect
to internal hydraulic pressure the allowable stresses
should not exceed limits calculated using the materials to
be used
<.2.3 8urst test. Pressure retaining parts not re.uiring
fatigue analysis and fracture mechanics analysis may be
accepted on the basis of a certified burst test and the
detailed stress analysis re.uired by <.2.2 need not be
provided. &he minimum bursting pressure should be
calculated using set formulaeH
F4? C,ns+ruc+%,n de+a%ls
<.4.9 Aeneral. &he construction should be such as to
minimi#e local concentrations of stress.
<.4.2 +elds.
,a- &he welding details and welding procedures should be
approved.
,b- All welded )oints within the pressure boundary of a
rudder actuator or connection parts transmitting
mechanical loads should be full penetration type or of
e.uivalent strength.
<.4.4 1il seals. 1il seals forming part of the external
pressure boundary are to comply with 4.2.4 and 4.2..
<.4. Isolating valves are to be fitted at the connection of
pipes to the actuator, and should be directly mounted on
the actuator.
<.4.3 Relief valves for protecting the rudder actuator
against over%pressure as re.uired in 4.4.4 are to comply
with the followingH
63
,a- &he setting pressure is not to be less than 9,23 times
the maximum working pressure expected under operating
conditions re.uired by 2.9.2,b-.
,b- &he minimum discharge capacity of the relief valve,s-
is to be not less than 99! per cent of the total capacity of
all pumps which provided power for the actuator. >nder
such conditions the rise in pressure should not exceed 9!
per cent of the setting pressure. In this regard due
consideration should be given to extreme foreseen
ambient conditions in respect of oil viscosity.
F4C N,n-des+ruc+%/e +es+%n&
<..9 &he rudder actuator should be sub)ected to suitable
and complete non%destructive testing to detect both
surface flaws and volumetric flaws. &he procedure and
acceptance criteria for non%destructive testing should be
in accordance with re.uirements of recogni#ed standards.
If found necessary, fracture mechanics analysis may be
used for determining maximum allowable flaw si#e.
F4B Tes+%n&
<.3.9 &ests, including hydrostatic tests, of all pressure
parts at 9,3 times the design pressure should be carried
out.
<.3.2 +hen installed on board the ship, the rudder
actuator should be sub)ected to a hydrostatic test and a
running test.
<.: Additional re.uirements for steering gear fitted to
ships with Ice 7lass notations
64
S-ar putea să vă placă și
- Parallelism Leverage High Performance Computer ArchitectureDocument4 paginiParallelism Leverage High Performance Computer Architecturehpss77Încă nu există evaluări
- The Actual Diesel Engine CycleDocument4 paginiThe Actual Diesel Engine Cyclehpss77Încă nu există evaluări
- Gard AS - Case Study - Entry Into Enclosed SpaceDocument2 paginiGard AS - Case Study - Entry Into Enclosed Spacehpss77Încă nu există evaluări
- Loss of Ship's Records When Changing Ownership or ManagementDocument2 paginiLoss of Ship's Records When Changing Ownership or Managementhpss77Încă nu există evaluări
- LBM I Memory PDFDocument23 paginiLBM I Memory PDFhpss77Încă nu există evaluări
- (David Ehrenfeld) Swimming Lessons Keeping AfloatDocument266 pagini(David Ehrenfeld) Swimming Lessons Keeping AfloatfuermiguelÎncă nu există evaluări
- 682 Verification of EEDIDocument8 pagini682 Verification of EEDIhpss77Încă nu există evaluări
- SL 1984Document1 paginăSL 1984hpss77Încă nu există evaluări
- Binary CodingDocument13 paginiBinary CodingsahildeoraÎncă nu există evaluări
- Control Air For ME Exh ValvesDocument8 paginiControl Air For ME Exh Valveshpss77Încă nu există evaluări
- LBM I Memory PDFDocument23 paginiLBM I Memory PDFhpss77Încă nu există evaluări
- SL 1999Document23 paginiSL 1999hpss77Încă nu există evaluări
- EthernetDocument20 paginiEthernethpss77Încă nu există evaluări
- SL 1995Document19 paginiSL 1995hpss77100% (1)
- Slide Type Fuel Valve Nozzles Extended TBODocument1 paginăSlide Type Fuel Valve Nozzles Extended TBOhpss77Încă nu există evaluări
- SL 1996Document14 paginiSL 1996hpss77Încă nu există evaluări
- SL 1998Document20 paginiSL 1998hpss77100% (1)
- 4stroke B&WDocument7 pagini4stroke B&Whpss77Încă nu există evaluări
- Man SL2009-511Document4 paginiMan SL2009-511hpss77Încă nu există evaluări
- SULPHUR CONSULTATION RESPONSES – IMPACT ASSESSMENTDocument21 paginiSULPHUR CONSULTATION RESPONSES – IMPACT ASSESSMENThpss77Încă nu există evaluări
- Cylinder Lubrication Marine Engines ArticleDocument10 paginiCylinder Lubrication Marine Engines ArticleVijay Geddada100% (2)
- 808-Port State ControlDocument4 pagini808-Port State Controlhpss77Încă nu există evaluări
- An Introduction To Vibration Aspects of Two-Stroke Diesel Engines I, N ShipsDocument11 paginiAn Introduction To Vibration Aspects of Two-Stroke Diesel Engines I, N Shipshpss77100% (1)
- 50 Success ClassicsDocument2 pagini50 Success Classicssobinj@gmail.comÎncă nu există evaluări
- Hitachi Man-B&w Diesel Engine Service DataDocument6 paginiHitachi Man-B&w Diesel Engine Service Datar0% (1)
- 15 Propulsion and ResistanceDocument31 pagini15 Propulsion and Resistancehpss77Încă nu există evaluări
- Battery MaintainenceDocument4 paginiBattery Maintainencehpss77Încă nu există evaluări
- Interest Calculation On DepositsDocument3 paginiInterest Calculation On Depositshpss77Încă nu există evaluări
- Pointers and MemoryDocument31 paginiPointers and MemorySivasai KumarÎncă nu există evaluări
- ApkDocument2 paginiApkhpss77Încă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Sawyer's Gas Turbine Combustor - Chapter 50001Document61 paginiSawyer's Gas Turbine Combustor - Chapter 50001Venkat AthmanathanÎncă nu există evaluări
- Raju's ResumeDocument7 paginiRaju's Resumerajubabu86Încă nu există evaluări
- Chinas Investment in African Special Economic ZonDocument7 paginiChinas Investment in African Special Economic ZonBarakaÎncă nu există evaluări
- Wd-1290rd Service Manual (Wd-12320 (5) RD, Wd-1290rd, Wd12311rda)Document42 paginiWd-1290rd Service Manual (Wd-12320 (5) RD, Wd-1290rd, Wd12311rda)Klema Hanis100% (1)
- A Path To Road Safety With No SignpostsDocument4 paginiA Path To Road Safety With No SignpostsYess Gareca0% (1)
- OutputDocument33 paginiOutputMike JonesÎncă nu există evaluări
- OLD Students 2019-2020 Schedule of FeesDocument28 paginiOLD Students 2019-2020 Schedule of FeesAllene SomarÎncă nu există evaluări
- Cathelco Seawater Pipework Anti-FoulingDocument7 paginiCathelco Seawater Pipework Anti-FoulingMichael CorderoÎncă nu există evaluări
- Navedtra 14315Document718 paginiNavedtra 14315sebastiandavid9100% (2)
- Database Design Chapter OverviewDocument17 paginiDatabase Design Chapter OverviewanwarÎncă nu există evaluări
- 52 DoorsDocument180 pagini52 DoorsNeessttorÎncă nu există evaluări
- The Ariane 5 Launcher FailureDocument2 paginiThe Ariane 5 Launcher Failureapi-25884963Încă nu există evaluări
- Siebel 8.1.x Integration Ed 1 (Student Guide - Volume 2)Document266 paginiSiebel 8.1.x Integration Ed 1 (Student Guide - Volume 2)Felipe Antonio Vásquez CastañedaÎncă nu există evaluări
- Entrepreneurship Challenges and SolutionsDocument17 paginiEntrepreneurship Challenges and SolutionsAman GoelÎncă nu există evaluări
- Work Order NoDocument1 paginăWork Order NoPau GarciaÎncă nu există evaluări
- MCQ on plant layout, process charts & material handlingDocument6 paginiMCQ on plant layout, process charts & material handlingbbbbbÎncă nu există evaluări
- Profile Nhanhe Trading Latest August2015Document15 paginiProfile Nhanhe Trading Latest August2015Pradeep SukumaranÎncă nu există evaluări
- Project Management BG ENGM91 Version Session 1bDocument5 paginiProject Management BG ENGM91 Version Session 1bADEFIOYE AdeniyiÎncă nu există evaluări
- ILTDocument2 paginiILTAlexandraÎncă nu există evaluări
- ME8681 BATCH - 2020-21 Cad Cam CompletedDocument144 paginiME8681 BATCH - 2020-21 Cad Cam CompletedMurugesan JeevaÎncă nu există evaluări
- 12Document51 pagini12patyal20Încă nu există evaluări
- Handover List ExcelDocument1 paginăHandover List Excelvishwas salunkheÎncă nu există evaluări
- List of Approved Builders Corbd 17.05.2017 PDFDocument24 paginiList of Approved Builders Corbd 17.05.2017 PDFVishalÎncă nu există evaluări
- BilsteinDocument202 paginiBilsteinDwi SurantoÎncă nu există evaluări
- Project Management ScriptDocument16 paginiProject Management ScriptQuah Qiu YuÎncă nu există evaluări
- The New ISO 55002:2018 Guidelines For The Application of ISO 55001Document2 paginiThe New ISO 55002:2018 Guidelines For The Application of ISO 55001tiagofernandes000Încă nu există evaluări
- Letter of Intent HEtEHE gRAHAMDocument3 paginiLetter of Intent HEtEHE gRAHAMDan FredÎncă nu există evaluări
- Pilatus Afm 401-888Document822 paginiPilatus Afm 401-888Gaurav Sawaai100% (2)
- Is 4002 Maintainability EngineeringDocument118 paginiIs 4002 Maintainability Engineeringraj KumarÎncă nu există evaluări
- Business Intelligence - Telecom IndustryDocument6 paginiBusiness Intelligence - Telecom IndustrySharmila SaravananÎncă nu există evaluări