S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- ElectrochemistryDocument65 paginiElectrochemistryAhom CK100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Item Kbat Chemistry Form Four Structure of The AtomDocument35 paginiItem Kbat Chemistry Form Four Structure of The AtomSiva GuruÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Cov MainDocument33 paginiCov MainSugunaÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Experiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)Document5 paginiExperiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)Mallesh GujjarÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Electrical Conductivity of SolutionsDocument17 paginiThe Electrical Conductivity of SolutionsHARIYANTO100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- ThermodynamicsDocument3 paginiThermodynamicsKanchana RavindranÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Human Body in Health and Illness 6th EditionDocument12 paginiHuman Body in Health and Illness 6th EditiongetlearnlinkÎncă nu există evaluări
- Panasonic DP2 42E DatasheetDocument15 paginiPanasonic DP2 42E DatasheetJosueÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- 01 RLC Circuit and ResonanceDocument46 pagini01 RLC Circuit and ResonanceLatif Nurohman Bayu Nugroho60% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Pourbaix BasicsDocument16 paginiPourbaix BasicsLaura DsbÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Examples - Combined StressDocument14 paginiExamples - Combined Stressamdeva100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Syllabus Chem 3300Document3 paginiSyllabus Chem 3300Anonymous L2rcEsRlMlÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- 6 1Document9 pagini6 1Shiu Ping WongÎncă nu există evaluări
- MV Circuit-Breakers Fluarc For Switching MotorDocument20 paginiMV Circuit-Breakers Fluarc For Switching MotorarieberdikarieÎncă nu există evaluări
- Pressure Drop in PFR/PBR: Inspiring Creative and MindsDocument30 paginiPressure Drop in PFR/PBR: Inspiring Creative and MindsChai Hong Loh100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Past Year WACE QuestionsDocument288 paginiPast Year WACE QuestionsPathmanathan NadesonÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- BS 499 PDFDocument36 paginiBS 499 PDFkbldamÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Solutions: CBSE Final Exam. 2012Document19 paginiSolutions: CBSE Final Exam. 2012Firdosh Khan100% (2)
- Theory of Nonlinear Acoustics in Fluids - Enflo B. O., Hedberg C. M., Enflo B. O PDFDocument290 paginiTheory of Nonlinear Acoustics in Fluids - Enflo B. O., Hedberg C. M., Enflo B. O PDFDaniela VillegasÎncă nu există evaluări
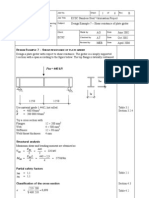
- Design Manual For Structural Stainless Steel Design Example 7 enDocument6 paginiDesign Manual For Structural Stainless Steel Design Example 7 enAl7amdlellah100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Module Light 2019Document21 paginiModule Light 2019Cart Kartika0% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- Nitrogen & PhosphorusDocument30 paginiNitrogen & PhosphorusSachin KumarÎncă nu există evaluări
- Assessment Cover Sheet Faculty of Engineering: Student Statement and SignatureDocument8 paginiAssessment Cover Sheet Faculty of Engineering: Student Statement and SignatureOshada Devpriya GamageÎncă nu există evaluări
- Transcript of IB Chemistry Mind MapDocument8 paginiTranscript of IB Chemistry Mind MapJayakumar SankaranÎncă nu există evaluări
- CHM 1321 Assignment 1 Answers: CN H H H H HDocument10 paginiCHM 1321 Assignment 1 Answers: CN H H H H HSara YuenÎncă nu există evaluări
- Fluorimetry & PhosphorimetryDocument26 paginiFluorimetry & PhosphorimetryAnonymous bQJydI100% (1)
- Hyphenated TechniquesDocument3 paginiHyphenated TechniquesKhawar KhalidÎncă nu există evaluări
- Variational PrinciplesDocument61 paginiVariational Principlesnickthegreek142857Încă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- CheatsheetDocument55 paginiCheatsheetPedro LeyvaÎncă nu există evaluări
- StandardDocument2 paginiStandardjopacameÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)