S-ar putea să vă placă și
- Novenario CompletoDocument92 paginiNovenario CompletoDiseño en tu CorreoÎncă nu există evaluări
- Heinrich Fries Teologia Fundamental HerderDocument640 paginiHeinrich Fries Teologia Fundamental HerderPau ChávezÎncă nu există evaluări
- 4366 Modelo Estatutos Sociedad en Comandita Por Acciones 26072011Document12 pagini4366 Modelo Estatutos Sociedad en Comandita Por Acciones 26072011Andrea Bertieri67% (3)
- 06 - W.J. Hesiodo y La Vida CampesinaDocument17 pagini06 - W.J. Hesiodo y La Vida Campesinamaria jose torres pinedaÎncă nu există evaluări
- QUE SON LAS 4 P y 4C DEL MARKETINGDocument12 paginiQUE SON LAS 4 P y 4C DEL MARKETINGMoises NavarroÎncă nu există evaluări
- Informe Final AutomatizaciónDocument12 paginiInforme Final AutomatizaciónAndrea BertieriÎncă nu există evaluări
- Acondicionamiento Señal Sensor de RevolucionesDocument7 paginiAcondicionamiento Señal Sensor de RevolucionesAndrea BertieriÎncă nu există evaluări
- Ensayo GenocidioDocument2 paginiEnsayo GenocidioAndrea BertieriÎncă nu există evaluări
- Taller Curso VacacionalDocument3 paginiTaller Curso VacacionalAndrea BertieriÎncă nu există evaluări
- M3 B3E-Por Qué Los Textos Son Difíciles de Comprender. (143-157) PDFDocument19 paginiM3 B3E-Por Qué Los Textos Son Difíciles de Comprender. (143-157) PDFOscarito BenavidesÎncă nu există evaluări
- TorresAndrewESM T3Document12 paginiTorresAndrewESM T3ANTONIO ROLDAN MENDOZAÎncă nu există evaluări
- Potencialidades HumanasDocument9 paginiPotencialidades HumanasAbelitoxLárezÎncă nu există evaluări
- 20.fin de Los Tiempos y Apariciones MarianasDocument4 pagini20.fin de Los Tiempos y Apariciones MarianasLuz Katerine Maya MÎncă nu există evaluări
- Dovorcio VoluntarioDocument3 paginiDovorcio VoluntarioMaria Antonieta Espinosa CAstilloÎncă nu există evaluări
- György LukácsDocument15 paginiGyörgy LukácsValeria MontañoÎncă nu există evaluări
- Manual de Pruebas Psicométricas ActualDocument5 paginiManual de Pruebas Psicométricas ActualAna ValienteÎncă nu există evaluări
- Matriz Doble Entrada Relaciones PublicasDocument2 paginiMatriz Doble Entrada Relaciones PublicasmazariegozneÎncă nu există evaluări
- Competencia VerbalDocument34 paginiCompetencia VerbalMaría Patricia Jaramillo HolguínÎncă nu există evaluări
- Convocatoria de Ingreso ISA 2020-2021Document40 paginiConvocatoria de Ingreso ISA 2020-2021OrosmanyÎncă nu există evaluări
- Sesion 7 FisicaDocument3 paginiSesion 7 FisicaALEXANDRO DEL PIERO FLORES VEGASÎncă nu există evaluări
- Descargar Formato Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de Controles - S2Document12 paginiDescargar Formato Matriz para Identificación de Peligros, Valoración de Riesgos y Determinación de Controles - S2Laura SuarezÎncă nu există evaluări
- Investigación Sobre Administración de ProyectosDocument8 paginiInvestigación Sobre Administración de ProyectosAldair Cruz BautistaÎncă nu există evaluări
- Carrera de Contador Publico: Que Es?Document2 paginiCarrera de Contador Publico: Que Es?lautaro luceroÎncă nu există evaluări
- Ficha Tecnica VirexDocument4 paginiFicha Tecnica VirexDiego SoláÎncă nu există evaluări
- Las Exportaciones de Gas Natural A Brasil y Su Impacto Al Crecimiento Economico de BoliviaDocument3 paginiLas Exportaciones de Gas Natural A Brasil y Su Impacto Al Crecimiento Economico de BoliviaJorge VeltranÎncă nu există evaluări
- Fase 5 Informe Final WFDBDocument9 paginiFase 5 Informe Final WFDBwilman fernando daza belloÎncă nu există evaluări
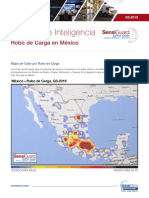
- Cargo Theft MX - Q3 2018 SPDocument5 paginiCargo Theft MX - Q3 2018 SPlezaa23100% (1)
- Diagnóstico y Tratamiento de La Diabetes en El EmbarazoDocument18 paginiDiagnóstico y Tratamiento de La Diabetes en El EmbarazoJaime Uziel Mendez GomezÎncă nu există evaluări
- Cosmética Del HambreDocument18 paginiCosmética Del HambreJuan David CárdenasÎncă nu există evaluări
- Copia de GEOLOGIA LINCE - ESTEFANIA - OTROSDocument36 paginiCopia de GEOLOGIA LINCE - ESTEFANIA - OTROSmauricio velizÎncă nu există evaluări
- P.S. 012-Pva-Ralli-2023Document8 paginiP.S. 012-Pva-Ralli-2023Alexander SilvaÎncă nu există evaluări
- EvaaaaDocument8 paginiEvaaaaDaniel YararyÎncă nu există evaluări
- 2023CV JavieraAlaideElizabethHerreraPedrozaDocument5 pagini2023CV JavieraAlaideElizabethHerreraPedrozaCatherine Cordón AlfaroÎncă nu există evaluări
- Homosexual I DadDocument62 paginiHomosexual I DadNeftali SantanaÎncă nu există evaluări
- ANALOGIAS CompletaDocument32 paginiANALOGIAS CompletajuaneromarineroÎncă nu există evaluări