S-ar putea să vă placă și
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe la EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasEvaluare: 2.5 din 5 stele2.5/5 (3)
- Glosario de ControlDocument6 paginiGlosario de Controlaiki_calli100% (1)
- Modelo Matemático de Enfriamiento y Calentamiento de NewtonDocument12 paginiModelo Matemático de Enfriamiento y Calentamiento de Newtonjaigvi1605Încă nu există evaluări
- Control AnticipativoDocument25 paginiControl Anticipativomira_brenÎncă nu există evaluări
- Concentración de sacarosa por evaporaciónDocument5 paginiConcentración de sacarosa por evaporaciónJpabloab9916Încă nu există evaluări
- TAR2BIOQBPDocument4 paginiTAR2BIOQBPYEAG92Încă nu există evaluări
- Medidores VolumetricosDocument4 paginiMedidores VolumetricosFrancelys Duran0% (1)
- Laboratorio 2 Sistema de ControlDocument2 paginiLaboratorio 2 Sistema de ControlEmeldl QuintanarÎncă nu există evaluări
- Problemas Tipo Corriente Alterna Resueltos y Propuestos Industriales 2012-2013Document24 paginiProblemas Tipo Corriente Alterna Resueltos y Propuestos Industriales 2012-2013Dácil Afonso0% (1)
- Extracción Líquido-Líquido: Separación de Mezclas Homogéneas LíquidasDocument82 paginiExtracción Líquido-Líquido: Separación de Mezclas Homogéneas LíquidasJohn AlexanderÎncă nu există evaluări
- Tipos de RegistradoresDocument3 paginiTipos de RegistradoresLuis Eduardo Rodriguez Garrafa100% (1)
- Regresión No LinealDocument6 paginiRegresión No LinealImmerÎncă nu există evaluări
- Filtros Digitales Usando La Ventana BlackmanDocument4 paginiFiltros Digitales Usando La Ventana BlackmanSasi RamírezÎncă nu există evaluări
- 2 Analizadores de Radiación ElectromagnéticaDocument4 pagini2 Analizadores de Radiación ElectromagnéticajoseÎncă nu există evaluări
- INDICESDocument4 paginiINDICESBikes TripÎncă nu există evaluări
- Control AnticipativoDocument32 paginiControl AnticipativoJavier de la CruzÎncă nu există evaluări
- Ejercicios de ColasDocument7 paginiEjercicios de ColasDaniel Alejandro Polanco MeloÎncă nu există evaluări
- Punto Fijo MultivariableDocument8 paginiPunto Fijo MultivariablericardoÎncă nu există evaluări
- Importancia de La Instrumentación VirtualDocument7 paginiImportancia de La Instrumentación VirtualVILLAFUERTE GARCIA EDUARDOÎncă nu există evaluări
- Sistemas de Orden SuperiorDocument11 paginiSistemas de Orden SuperiorRafael Diaz RomeroÎncă nu există evaluări
- Simulación de Procesos Por LoteDocument2 paginiSimulación de Procesos Por LoteSofía Salg0% (1)
- Farma 1 Practica 8Document6 paginiFarma 1 Practica 8Roxana HernandezÎncă nu există evaluări
- Analogías de Función de TransferenciaDocument10 paginiAnalogías de Función de TransferenciaMauricioFernándezÎncă nu există evaluări
- Examen - U1 - WTDocument2 paginiExamen - U1 - WTWilson Travez100% (1)
- Comparación de Lazo Abierto y CerradoDocument2 paginiComparación de Lazo Abierto y Cerradocarlos ballartaÎncă nu există evaluări
- Primera Ley TermodinámicaDocument32 paginiPrimera Ley TermodinámicaAlexander Micha Tello50% (2)
- Practica 2Document8 paginiPractica 2JeffersonForeroÎncă nu există evaluări
- Norma SamaDocument8 paginiNorma SamaGera Perez0% (1)
- Módulo 6 - Acceso Al SatéliteDocument27 paginiMódulo 6 - Acceso Al SatéliteJoel Lopez100% (1)
- 1 - Introduccion y Primer Principio Sistemas CerradosDocument7 pagini1 - Introduccion y Primer Principio Sistemas CerradosNaiko CastellviÎncă nu există evaluări
- Ejemplo FUGDocument4 paginiEjemplo FUGcarlosÎncă nu există evaluări
- Practica # 6Document9 paginiPractica # 6Erik Daza DiazÎncă nu există evaluări
- Control en CascadaDocument24 paginiControl en CascadaPROMO95Încă nu există evaluări
- 5 Ejercicios Walpole PoissonDocument47 pagini5 Ejercicios Walpole Poissonangelsergio0% (1)
- Experimentos Con Un Factor PDFDocument15 paginiExperimentos Con Un Factor PDFFernando JordanÎncă nu există evaluări
- Chapra Cap18 InterpolaciónDocument36 paginiChapra Cap18 Interpolaciónjohanfredy22Încă nu există evaluări
- Evaluación Experimentos Factoriales PDFDocument1 paginăEvaluación Experimentos Factoriales PDFSuhayl AlvaradoÎncă nu există evaluări
- Sistemas de control en lazo cerrado y lazo abiertoDocument14 paginiSistemas de control en lazo cerrado y lazo abiertoNilton eloy Con tretas de la cruzÎncă nu există evaluări
- Aplicaciones Cuantitativas y Cualitativas de Espectrometría de MasasDocument4 paginiAplicaciones Cuantitativas y Cualitativas de Espectrometría de MasasCarlos LopezÎncă nu există evaluări
- Tarea #5Document1 paginăTarea #5niltoncapa33% (3)
- Informe CronoMetro DigitalDocument6 paginiInforme CronoMetro DigitalCRR1992Încă nu există evaluări
- Complemento Practica 5Document17 paginiComplemento Practica 5Lucario Peeling100% (1)
- El Control de La Presión en Los Procesos Industriales Da Condiciones de Operación SegurasDocument6 paginiEl Control de La Presión en Los Procesos Industriales Da Condiciones de Operación SegurasGlendy Isela Cruz OlanÎncă nu există evaluări
- Unidad 2 Espectroscopia de Absorción en El UvDocument15 paginiUnidad 2 Espectroscopia de Absorción en El UvDiamante Hernandez Merida0% (1)
- Control de LuminosidadDocument3 paginiControl de LuminosidadAlex GoreÎncă nu există evaluări
- Trabajo N - 3Document18 paginiTrabajo N - 3edu2286Încă nu există evaluări
- Taller 2 ..Document4 paginiTaller 2 ..Luisa Marulanda100% (1)
- Normas Minimas de Seguridad en Laboratorio de Circuitos ElectricosDocument5 paginiNormas Minimas de Seguridad en Laboratorio de Circuitos Electricos601195Încă nu există evaluări
- Pensamiento de Los Sistemas DurosDocument14 paginiPensamiento de Los Sistemas Durosreggie12151Încă nu există evaluări
- Retardo de ProcesoDocument7 paginiRetardo de ProcesoAlejandro RiveraÎncă nu există evaluări
- Método de Simpson-PROGRAMACION BASICADocument7 paginiMétodo de Simpson-PROGRAMACION BASICAEdwin Cumpa Inoñan100% (1)
- Tarea 4 Metodos NumericosDocument17 paginiTarea 4 Metodos NumericosJohnKreamerÎncă nu există evaluări
- Planeación de capacidad usando listasDocument45 paginiPlaneación de capacidad usando listaslore002Încă nu există evaluări
- FISICADocument7 paginiFISICAJesus Leon LugoÎncă nu există evaluări
- Sistema de Control de Lazo Abierto y Lazo CerradoDocument4 paginiSistema de Control de Lazo Abierto y Lazo CerradoANDREA CAROLINA GOMEZ CAMELOÎncă nu există evaluări
- Sistema Lazo Abierto y CerradoDocument6 paginiSistema Lazo Abierto y Cerradoaide natalyÎncă nu există evaluări
- Sistemas de control abiertos y cerradosDocument3 paginiSistemas de control abiertos y cerradosAngel David Ponce OropezaÎncă nu există evaluări
- Diferencias entre sistemas de control en lazo abierto y cerradoDocument4 paginiDiferencias entre sistemas de control en lazo abierto y cerradoAngelo Alquinga50% (2)
- Sistemas de control lazo abierto vs cerradoDocument5 paginiSistemas de control lazo abierto vs cerradoMiguel AngelÎncă nu există evaluări
- Función de Transferencia, Diagramas de Bloque y Diagramas de Flujo de Señal (FlujogramasDocument25 paginiFunción de Transferencia, Diagramas de Bloque y Diagramas de Flujo de Señal (Flujogramaskirito bassÎncă nu există evaluări
- Condensadores: tipos y codificaciónDocument7 paginiCondensadores: tipos y codificaciónIvan Andres MuñozÎncă nu există evaluări
- Condensadores: tipos y codificaciónDocument7 paginiCondensadores: tipos y codificaciónIvan Andres MuñozÎncă nu există evaluări
- Problemas de TemodinamicaDocument8 paginiProblemas de TemodinamicaGuillermoSanchezÎncă nu există evaluări
- Informe Complejo Termoelectrico de ColonDocument10 paginiInforme Complejo Termoelectrico de ColonGuillermoSanchezÎncă nu există evaluări
- Condensadores: tipos y codificaciónDocument7 paginiCondensadores: tipos y codificaciónIvan Andres MuñozÎncă nu există evaluări
- Informe Complejo Termoelectrico de ColonDocument13 paginiInforme Complejo Termoelectrico de ColonGuillermoSanchezÎncă nu există evaluări
- Problemas de Termo IIDocument5 paginiProblemas de Termo IIGuillermoSanchezÎncă nu există evaluări
- Instalaciones HidrosanitariasDocument59 paginiInstalaciones HidrosanitariasOmar Ismael MendozaÎncă nu există evaluări
- Condensador PDFDocument32 paginiCondensador PDFGuillermoSanchezÎncă nu există evaluări
- Ejemplo Ciclo RankineDocument2 paginiEjemplo Ciclo RankineGuillermoSanchezÎncă nu există evaluări
- Examen Semestral Diseño de Lineas y SubestacionesDocument4 paginiExamen Semestral Diseño de Lineas y SubestacionesGuillermoSanchezÎncă nu există evaluări
- Motor StirlingDocument1 paginăMotor Stirlingjuan_numÎncă nu există evaluări
- Gyro RatesDocument23 paginiGyro RatesGuillermoSanchezÎncă nu există evaluări
- Introducción al Control Anticipativo de lazo abiertoDocument21 paginiIntroducción al Control Anticipativo de lazo abiertoGuillermoSanchezÎncă nu există evaluări
- Automatizacion 1Document14 paginiAutomatizacion 1Mily RFÎncă nu există evaluări
- Clasificación de Bosniak de Masas Renales QuísticDocument1 paginăClasificación de Bosniak de Masas Renales QuísticJosé Luis Barrantes TicllaÎncă nu există evaluări
- Cultivo arroz impacto medioambienteDocument2 paginiCultivo arroz impacto medioambientedaniel0% (1)
- Por Que Debemos Estudiar La PolíticaDocument11 paginiPor Que Debemos Estudiar La PolíticaJhesus Garcia75% (4)
- Prototipo de Vivienda de Interés Social Con Criterios (Protocolo)Document38 paginiPrototipo de Vivienda de Interés Social Con Criterios (Protocolo)Ángel CastellanosÎncă nu există evaluări
- Manual Control Remoto EntelDocument2 paginiManual Control Remoto EntelAndres Araneda0% (1)
- (CITROEN) Manual de Taller Citroen C6 2005 PDFDocument222 pagini(CITROEN) Manual de Taller Citroen C6 2005 PDFtatianaÎncă nu există evaluări
- Seguridad Ataques Redes PDFDocument28 paginiSeguridad Ataques Redes PDFJonathan Ponce FouereÎncă nu există evaluări
- Manual de Soldadura y CorteDocument9 paginiManual de Soldadura y CorteGermanÎncă nu există evaluări
- Normas APA Modulo Fundamentacion TeoricaDocument57 paginiNormas APA Modulo Fundamentacion Teoricacmauriciohn100% (1)
- Topografía para caminos y vías urbanasDocument1 paginăTopografía para caminos y vías urbanasFredy Tinco ParedesÎncă nu există evaluări
- Analisis Modelo Negocio PDFDocument52 paginiAnalisis Modelo Negocio PDFelreyleon1Încă nu există evaluări
- Higiene PosturalDocument6 paginiHigiene PosturalADRIANA RIVADENEIRAÎncă nu există evaluări
- Problemas de calidad y variabilidad funcionalDocument2 paginiProblemas de calidad y variabilidad funcionalAbraham Vega OrtegaÎncă nu există evaluări
- Sobre "Culturas Hibridas. Estrategias para Entrar y Salir... " (Reseña)Document7 paginiSobre "Culturas Hibridas. Estrategias para Entrar y Salir... " (Reseña)Jesús Martín Barbero100% (1)
- HidraulicaDocument97 paginiHidraulicaxeveregodoyÎncă nu există evaluări
- Aplicacion de Bond-Graph A MecanicaDocument26 paginiAplicacion de Bond-Graph A Mecanicajmnejer100% (1)
- Trabajo Curso Procesos de ManufacturaDocument3 paginiTrabajo Curso Procesos de ManufacturaRoberto MartinezÎncă nu există evaluări
- Taller 2Document16 paginiTaller 2alejo388167% (9)
- Contabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26ADocument2 paginiContabilidad II tarea #4 mapa mental y ejercicios P7-25A y P7-26AOdalis HernandezÎncă nu există evaluări
- Normas IeeeDocument4 paginiNormas IeeeSebastian Leon33% (3)
- Modelo ADDIEDocument10 paginiModelo ADDIERaquel GavilanezÎncă nu există evaluări
- Voz Sobre IPDocument79 paginiVoz Sobre IPENKELLYGRAGONÎncă nu există evaluări
- Noa HMDocument152 paginiNoa HMnestorÎncă nu există evaluări
- TALLER SEMANA 5.docx Estadistica InferencialDocument2 paginiTALLER SEMANA 5.docx Estadistica InferencialGrace Arevalo20% (5)
- Extracto Escritura Publica - 123456951217Document15 paginiExtracto Escritura Publica - 123456951217marcoÎncă nu există evaluări
- Diseño Curricular Gestion LogisticaDocument67 paginiDiseño Curricular Gestion LogisticaFernando MarquezÎncă nu există evaluări
- Planos SierraDocument10 paginiPlanos SierraMauricio SanchezÎncă nu există evaluări
- Para BolDocument24 paginiPara BolbalolÎncă nu există evaluări
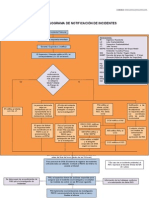
- Flujograma Notificación IncidentesDocument1 paginăFlujograma Notificación IncidentesMiguel Soto EspinozaÎncă nu există evaluări