S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
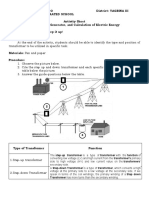
- Activity Sheet Session 9-MORADO, NANETTEDocument4 paginiActivity Sheet Session 9-MORADO, NANETTENanette MoradoÎncă nu există evaluări
- Siemens Micromaster Eco ManualDocument181 paginiSiemens Micromaster Eco ManualMohammad Imtiaz ChowdhuryÎncă nu există evaluări
- Feedback and Feedforward SystemDocument4 paginiFeedback and Feedforward Systempoojita bannaÎncă nu există evaluări
- Lab Worksheet # 8Document5 paginiLab Worksheet # 8MUNEEB SHAHÎncă nu există evaluări
- Science SOL 4.3 - Electricity: Lightning Is Caused by Static ElectricityDocument3 paginiScience SOL 4.3 - Electricity: Lightning Is Caused by Static ElectricityKrishnaKumar PodagatlapalliÎncă nu există evaluări
- UQ Innovation Expo 2011 PosterDocument1 paginăUQ Innovation Expo 2011 PosterAlexander StevensÎncă nu există evaluări
- Base Plate: General DescriptionDocument2 paginiBase Plate: General DescriptionPranilÎncă nu există evaluări
- CN202SR-Electrical Wiring Diagrams - 2019 - 10 - 18 NEW PDFDocument378 paginiCN202SR-Electrical Wiring Diagrams - 2019 - 10 - 18 NEW PDFLamro TambaÎncă nu există evaluări
- NOJA and Tavrida: Unique IntegrationDocument1 paginăNOJA and Tavrida: Unique IntegrationTayyab ZubairÎncă nu există evaluări
- LM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 DescriptionDocument42 paginiLM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 Descriptioncontrol tejidoÎncă nu există evaluări
- K46 ManualDocument8 paginiK46 ManualDavid KasaiÎncă nu există evaluări
- Mda DSP PDFDocument2 paginiMda DSP PDFMohamed AboelmagdÎncă nu există evaluări
- User Guide: Tracer™ TD7 With UC 800Document24 paginiUser Guide: Tracer™ TD7 With UC 80001666754614Încă nu există evaluări
- ZorcDocument15 paginiZorcputrasejahtraÎncă nu există evaluări
- Tayug I Substation Operating Procedures and GuidelinesDocument6 paginiTayug I Substation Operating Procedures and GuidelinesTrenchera SubstationÎncă nu există evaluări
- Yaskawa Manuals 581Document82 paginiYaskawa Manuals 581Ali shaaf ghoreishiÎncă nu există evaluări
- FSR 2022 10 Toromocho SAG Mech Rev PDFDocument62 paginiFSR 2022 10 Toromocho SAG Mech Rev PDFJuan CarlosÎncă nu există evaluări
- Micom P740: Numerical Busbar ProtectionDocument386 paginiMicom P740: Numerical Busbar ProtectionDinh Xuan Duyet100% (1)
- 62-005 Ed04-1Document646 pagini62-005 Ed04-1Joao Lopes SilvaÎncă nu există evaluări
- Cable Sizing CalculationDocument4 paginiCable Sizing CalculationRohan Gurav100% (6)
- Wind Energy Wind Is Generated As The Fluid and Gaseous Parts of The Atmosphere Move Across The Surface of The EarthDocument3 paginiWind Energy Wind Is Generated As The Fluid and Gaseous Parts of The Atmosphere Move Across The Surface of The EarthEphraim TermuloÎncă nu există evaluări
- 07-1004RD 07-1004RD B B: Scientific Systems IncDocument1 pagină07-1004RD 07-1004RD B B: Scientific Systems IncSyed RizviÎncă nu există evaluări
- 125mbps 4400 Wireless AP 2Document2 pagini125mbps 4400 Wireless AP 2FreeTheNetÎncă nu există evaluări
- CMC156$DatasheetDocument4 paginiCMC156$DatasheetLam Duy TienÎncă nu există evaluări
- Digital Ic TesterDocument28 paginiDigital Ic TesterChris ManojÎncă nu există evaluări
- PBAT-61 Cell Sensor: Installation & Operation Manual V1.0Document16 paginiPBAT-61 Cell Sensor: Installation & Operation Manual V1.0Eko SutjiptoÎncă nu există evaluări
- All You Ever Wanted To Know About NICAMDocument15 paginiAll You Ever Wanted To Know About NICAMFirdaus SikumbangÎncă nu există evaluări
- Step Timing Control Electronic Control UnitDocument9 paginiStep Timing Control Electronic Control Unitricardolechuga100% (1)
- BT 344082Document10 paginiBT 344082leventozenÎncă nu există evaluări
- Coin Cell Batteries For LoRaWAN IoT Device - Murata QoitechDocument9 paginiCoin Cell Batteries For LoRaWAN IoT Device - Murata QoitechAri LundenÎncă nu există evaluări