S-ar putea să vă placă și
- Video Games NP HardDocument21 paginiVideo Games NP HardGabriel Silva RamosÎncă nu există evaluări
- P NP NP CompleteDocument3 paginiP NP NP CompleteakilrsdiÎncă nu există evaluări
- Plane Geometry 1913Document307 paginiPlane Geometry 1913Paul Komla DarkuÎncă nu există evaluări
- VLSI Design CircuitsDocument12 paginiVLSI Design Circuitsali.umrani4538Încă nu există evaluări
- Metroid Fusion WalkthroughDocument87 paginiMetroid Fusion Walkthroughkelvin immanuel susantoÎncă nu există evaluări
- NesasmDocument26 paginiNesasmcarlo_asd1Încă nu există evaluări
- Synchronous Dram: Pin Assignment (Top View) 54-Pin TSOP FeaturesDocument59 paginiSynchronous Dram: Pin Assignment (Top View) 54-Pin TSOP Featuresdarango30Încă nu există evaluări
- Using breakpoints to find graphics data in GBA gamesDocument2 paginiUsing breakpoints to find graphics data in GBA gamesمحمود المساعيد0% (1)
- Geometry PuzzleDocument3 paginiGeometry PuzzleJoni Lyn Ba-as BayengÎncă nu există evaluări
- Metroid Prime Trilogy AltDocument2 paginiMetroid Prime Trilogy AltbenitojuarezxlÎncă nu există evaluări
- Solving Sudoku PDFDocument11 paginiSolving Sudoku PDFsicogoenÎncă nu există evaluări
- GBA Programming Manual v1.22Document172 paginiGBA Programming Manual v1.22proxymo1Încă nu există evaluări
- Project Report USB GameboyDocument70 paginiProject Report USB GameboyRambo333Încă nu există evaluări
- Crosswords Puzzle 8C, 6CDocument24 paginiCrosswords Puzzle 8C, 6CmonicacorbusÎncă nu există evaluări
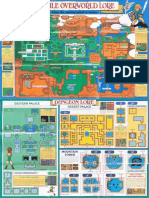
- Zelda A Link To The Past Overworld LoreDocument2 paginiZelda A Link To The Past Overworld LoreSammyÎncă nu există evaluări
- Game Boy Advance - Midi Interface (Hack Part 2)Document7 paginiGame Boy Advance - Midi Interface (Hack Part 2)Mohan Perera100% (5)
- Sony Se2ag1 PDFDocument60 paginiSony Se2ag1 PDFbvm69Încă nu există evaluări
- VGA PS2 Board Schematic PDFDocument2 paginiVGA PS2 Board Schematic PDFAli Al-harbi100% (1)
- Assembly Programming Journal 7Document108 paginiAssembly Programming Journal 7AmineBenaliÎncă nu există evaluări
- Sword of Mana-WalkthroughDocument168 paginiSword of Mana-WalkthroughAaron Ekman100% (2)
- Verilog/Digital FAQS by Verilog Course Team Email:Info@Verilogcourseteam - Com WWW - VlsiDocument7 paginiVerilog/Digital FAQS by Verilog Course Team Email:Info@Verilogcourseteam - Com WWW - VlsiverilogcourseteamÎncă nu există evaluări
- GBProject PDFDocument28 paginiGBProject PDFneslouÎncă nu există evaluări
- Randomized AlgorithmsDocument12 paginiRandomized AlgorithmsRaji PillaiÎncă nu există evaluări
- NDS NITRO - Programming - Manual - V1 - 44Document388 paginiNDS NITRO - Programming - Manual - V1 - 44mksyd4Încă nu există evaluări
- Polypolyhedra Part 1 PDFDocument26 paginiPolypolyhedra Part 1 PDFAdriano BelucoÎncă nu există evaluări
- ESPduino 32sDocument1 paginăESPduino 32srigsapanama100% (1)
- GBA I/O Register ListDocument2 paginiGBA I/O Register Listspammy101Încă nu există evaluări
- Full Opcodes Tables of CPUs: Z80A, Z80180 (HD64180)Document9 paginiFull Opcodes Tables of CPUs: Z80A, Z80180 (HD64180)Eugene LisovyÎncă nu există evaluări
- Interlocking Puzzles Burr Set #2 42-Piece Wooden Burr PuzzleDocument3 paginiInterlocking Puzzles Burr Set #2 42-Piece Wooden Burr Puzzlesaito36Încă nu există evaluări
- Taxicab GeometryDocument3 paginiTaxicab GeometrystevenspillkumarÎncă nu există evaluări
- Legend of Zelda ManualDocument12 paginiLegend of Zelda ManualAaron Ekman100% (2)
- PS Vita Open SDK SpecificationDocument23 paginiPS Vita Open SDK SpecificationVincent Henwie BarrogaÎncă nu există evaluări
- The Nintendo GameboyDocument171 paginiThe Nintendo Gameboynacional007Încă nu există evaluări
- Tetris: Tetris Is A Computer Game Invented by Alexey Pajitnov in 1985 at The Academy ofDocument21 paginiTetris: Tetris Is A Computer Game Invented by Alexey Pajitnov in 1985 at The Academy ofpaladinss69Încă nu există evaluări
- Boo PrimerDocument57 paginiBoo Primeroder_atcciÎncă nu există evaluări
- Zelda Ocarina of Time - N64 WalkthroughDocument177 paginiZelda Ocarina of Time - N64 WalkthroughStyles TogashiÎncă nu există evaluări
- 1-Introduction To VHDLDocument23 pagini1-Introduction To VHDLVedansh JainÎncă nu există evaluări
- AITMO 20009 Puzzle Contest PoblemDocument4 paginiAITMO 20009 Puzzle Contest PoblemChusak WattanapadungsakÎncă nu există evaluări
- Build a Multiplayer Map for BFME2 in 8 StepsDocument18 paginiBuild a Multiplayer Map for BFME2 in 8 Stepss0d0m1z3dÎncă nu există evaluări
- Big Circle PuzzleDocument1 paginăBig Circle Puzzleape21100% (1)
- Bfme2 Map TipsDocument4 paginiBfme2 Map Tipsdarklord20Încă nu există evaluări
- ShikakuDocument3 paginiShikakuDevangini VasubhaiÎncă nu există evaluări
- Programmable Logic ArrayDocument6 paginiProgrammable Logic Arraysrividya0444Încă nu există evaluări
- Rubik PDFDocument8 paginiRubik PDFJahir Fiquitiva100% (1)
- Super Metroid WalkthroughDocument29 paginiSuper Metroid WalkthroughKaio Adame de CarvalhoÎncă nu există evaluări
- Memory GameDocument7 paginiMemory GameSakshi JaiswalÎncă nu există evaluări
- Ghosts of The MoorDocument2 paginiGhosts of The MoorWkrscribdÎncă nu există evaluări
- Servo Drivers For Positioning Using Omron CP1L PLCDocument8 paginiServo Drivers For Positioning Using Omron CP1L PLCMinh DươngÎncă nu există evaluări
- Design Your Own Angry Birds LevelDocument2 paginiDesign Your Own Angry Birds LevelPhạm Minh Thư (Ariana)Încă nu există evaluări
- Black Nightmare SolutionDocument1 paginăBlack Nightmare SolutionslounixÎncă nu există evaluări
- Assassins Creed Revelations-SKIDROW (Download Torrent) - TPBDocument6 paginiAssassins Creed Revelations-SKIDROW (Download Torrent) - TPBvishalravi040% (1)
- Intellivision Black Whale Reverse Engineering Report 20180423b PDFDocument101 paginiIntellivision Black Whale Reverse Engineering Report 20180423b PDFzawarskiÎncă nu există evaluări
- The Legend of Zelda - Link's AwakeningDocument58 paginiThe Legend of Zelda - Link's Awakeningapi-19737643Încă nu există evaluări
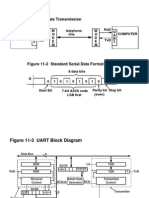
- VHDL UartDocument53 paginiVHDL UartEhsan Mahdavi100% (1)
- An Ecient Algorithm For Shortest Paths in Vertical and Horizontal SegmentsDocument14 paginiAn Ecient Algorithm For Shortest Paths in Vertical and Horizontal Segmentsopenid_AePkLAJcÎncă nu există evaluări
- Lattice QCDDocument42 paginiLattice QCDBarbara YaeggyÎncă nu există evaluări
- D1, L4 Graphs and NetworksDocument52 paginiD1, L4 Graphs and NetworksmokhtarppgÎncă nu există evaluări
- Robust Field-Aligned Global Parametrization: Supplement 1, Proofs and Algorithmic DetailsDocument4 paginiRobust Field-Aligned Global Parametrization: Supplement 1, Proofs and Algorithmic Detailsrtfss13666Încă nu există evaluări
- Floyd-Warshall AlgorithmDocument6 paginiFloyd-Warshall Algorithmbartee000Încă nu există evaluări
- Maple Boundary Value ProblemsDocument92 paginiMaple Boundary Value ProblemsLeo KutsÎncă nu există evaluări
- Calculate The Acceleration of A PendulumDocument25 paginiCalculate The Acceleration of A PendulumLeo KutsÎncă nu există evaluări
- Wilberforce Pendulum 2019!!!!!!!!!!!!!!!!!!!Document8 paginiWilberforce Pendulum 2019!!!!!!!!!!!!!!!!!!!Leo KutsÎncă nu există evaluări
- Pyrotechnic Free Space Mechanisms!!!!!Document1 paginăPyrotechnic Free Space Mechanisms!!!!!Leo KutsÎncă nu există evaluări
- MIT16 07F09 Lec20-Lagrange EqnDocument10 paginiMIT16 07F09 Lec20-Lagrange EqnRajesh SharmaÎncă nu există evaluări
- ЛИТЕРАТУРА Wilberforce PendulumDocument1 paginăЛИТЕРАТУРА Wilberforce PendulumLeo KutsÎncă nu există evaluări
- 5.2 Elastic Pendulum ЛИТЕРАТУРА!!!!!!Document1 pagină5.2 Elastic Pendulum ЛИТЕРАТУРА!!!!!!Leo KutsÎncă nu există evaluări
- Maple WithDocument1 paginăMaple WithLeo KutsÎncă nu există evaluări
- Wilberforce PendulumDocument9 paginiWilberforce PendulumLeo KutsÎncă nu există evaluări
- Wilberforce PENDULUM 8Document20 paginiWilberforce PENDULUM 8Leo KutsÎncă nu există evaluări
- Constraints, Generalised Coordinates and Configuration SpaceDocument7 paginiConstraints, Generalised Coordinates and Configuration SpaceLeo KutsÎncă nu există evaluări
- Deployable Perimeter Truss With Blade Reel Deployment MechanismDocument2 paginiDeployable Perimeter Truss With Blade Reel Deployment MechanismLeo KutsÎncă nu există evaluări
- Rotor GyroscopeDocument8 paginiRotor GyroscopeLeo KutsÎncă nu există evaluări
- Maple Modified Euler Method Modified EulerDocument1 paginăMaple Modified Euler Method Modified EulerLeo KutsÎncă nu există evaluări
- 2 Dimensional SpringDocument3 pagini2 Dimensional SpringLeo KutsÎncă nu există evaluări
- рисунки PDFDocument18 paginiрисунки PDFLeo KutsÎncă nu există evaluări
- беспилотники ReferencesDocument1 paginăбеспилотники ReferencesLeo KutsÎncă nu există evaluări
- Lagrangian Mechanics of Motorised Momentum Exchange TethersDocument17 paginiLagrangian Mechanics of Motorised Momentum Exchange TethersLeo KutsÎncă nu există evaluări
- Build Small Floating Arm Trebuchet PlansDocument17 paginiBuild Small Floating Arm Trebuchet PlansLeo Kuts100% (1)
- Dynamics of An Autoparametric Pendulum-LikeDocument16 paginiDynamics of An Autoparametric Pendulum-LikeLeo KutsÎncă nu există evaluări
- Equ PsDocument3 paginiEqu PsLeo KutsÎncă nu există evaluări
- геометрия орбит PDFDocument16 paginiгеометрия орбит PDFLeo KutsÎncă nu există evaluări
- Parametric ResonanceDocument5 paginiParametric ResonanceLeo KutsÎncă nu există evaluări
- 1005 0176Document23 pagini1005 0176Leo KutsÎncă nu există evaluări
- Modeling and Dynamic Analysis of a TrebuchetDocument5 paginiModeling and Dynamic Analysis of a TrebuchetLeo KutsÎncă nu există evaluări
- Maple Introduction To Fuzzy ControllersDocument15 paginiMaple Introduction To Fuzzy ControllersLeo KutsÎncă nu există evaluări
- Trebuchet PhysicsDocument16 paginiTrebuchet PhysicsLeo KutsÎncă nu există evaluări
- варианты Лагранж и Гамильтое PDFDocument11 paginiварианты Лагранж и Гамильтое PDFLeo KutsÎncă nu există evaluări
- Analytical Mechanics: A Guided Tour ofDocument139 paginiAnalytical Mechanics: A Guided Tour ofabhibecksÎncă nu există evaluări
- Last Phys2D !!!!!!!Document30 paginiLast Phys2D !!!!!!!Leo KutsÎncă nu există evaluări
- 2016 Mustang WiringDocument9 pagini2016 Mustang WiringRuben TeixeiraÎncă nu există evaluări
- Failure Analysis Case Study PDFDocument2 paginiFailure Analysis Case Study PDFScott50% (2)
- Guidelines Tax Related DeclarationsDocument16 paginiGuidelines Tax Related DeclarationsRaghul MuthuÎncă nu există evaluări
- Obiafatimajane Chapter 3 Lesson 7Document17 paginiObiafatimajane Chapter 3 Lesson 7Ayela Kim PiliÎncă nu există evaluări
- Mechanics of Deformable BodiesDocument21 paginiMechanics of Deformable BodiesVarun. hrÎncă nu există evaluări
- Afu 08504 - International Capital Bdgeting - Tutorial QuestionsDocument4 paginiAfu 08504 - International Capital Bdgeting - Tutorial QuestionsHashim SaidÎncă nu există evaluări
- WWW - Istructe.pdf FIP UKDocument4 paginiWWW - Istructe.pdf FIP UKBunkun15Încă nu există evaluări
- Vehicle Registration Renewal Form DetailsDocument1 paginăVehicle Registration Renewal Form Detailsabe lincolnÎncă nu există evaluări
- The Effect of Dodd-Frank On Divorcing Citizens 1Document5 paginiThe Effect of Dodd-Frank On Divorcing Citizens 1Noel CookmanÎncă nu există evaluări
- Material Safety Data Sheet Lime Kiln Dust: Rev. Date:5/1/2008Document6 paginiMaterial Safety Data Sheet Lime Kiln Dust: Rev. Date:5/1/2008suckrindjink100% (1)
- Emergency Room Delivery RecordDocument7 paginiEmergency Room Delivery RecordMariel VillamorÎncă nu există evaluări
- Doe v. Myspace, Inc. Et Al - Document No. 37Document2 paginiDoe v. Myspace, Inc. Et Al - Document No. 37Justia.comÎncă nu există evaluări
- Neuropathology of Epilepsy: Epilepsy-Related Deaths and SUDEPDocument11 paginiNeuropathology of Epilepsy: Epilepsy-Related Deaths and SUDEPTeuku AvicennaÎncă nu există evaluări
- Wacker Neuson RTDocument120 paginiWacker Neuson RTJANUSZ2017100% (4)
- Budget ControlDocument7 paginiBudget ControlArnel CopinaÎncă nu există evaluări
- Post Marketing SurveillanceDocument19 paginiPost Marketing SurveillanceRamanjeet SinghÎncă nu există evaluări
- 10 Slides For A Perfect Startup Pitch DeckDocument6 pagini10 Slides For A Perfect Startup Pitch DeckZakky AzhariÎncă nu există evaluări
- Tygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingDocument4 paginiTygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingAluizioÎncă nu există evaluări
- Weir Stability Analysis Report PDFDocument47 paginiWeir Stability Analysis Report PDFSubodh PoudelÎncă nu există evaluări
- How To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)Document19 paginiHow To Check PC Full Specs Windows 10 in 5 Ways (Minitool News)hiwot kebedeÎncă nu există evaluări
- 2002, Vol.86, Issues 4, Hospital MedicineDocument221 pagini2002, Vol.86, Issues 4, Hospital MedicineFaisal H RanaÎncă nu există evaluări
- Janome DC6030 Sewing Machine Instruction ManualDocument56 paginiJanome DC6030 Sewing Machine Instruction ManualiliiexpugnansÎncă nu există evaluări
- Electrosteel Castings Limited (ECL) - Technology That CaresDocument4 paginiElectrosteel Castings Limited (ECL) - Technology That CaresUjjawal PrakashÎncă nu există evaluări
- Inbound 9092675230374889652Document14 paginiInbound 9092675230374889652Sean Andrew SorianoÎncă nu există evaluări
- NPV Irr ArrDocument16 paginiNPV Irr ArrAnjaliÎncă nu există evaluări
- Distinguish Between Tax and FeeDocument2 paginiDistinguish Between Tax and FeeRishi Agarwal100% (1)
- SOLVING LINEAR SYSTEMS OF EQUATIONS (40 CHARACTERSDocument3 paginiSOLVING LINEAR SYSTEMS OF EQUATIONS (40 CHARACTERSwaleedÎncă nu există evaluări
- Module 2Document42 paginiModule 2DhananjayaÎncă nu există evaluări
- Jazan Refinery and Terminal ProjectDocument3 paginiJazan Refinery and Terminal ProjectkhsaeedÎncă nu există evaluări
- CGSC Sales Method - Official Sales ScriptDocument12 paginiCGSC Sales Method - Official Sales ScriptAlan FerreiraÎncă nu există evaluări