S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- LBS and Control Presentaion For ADB Tender (201906)Document58 paginiLBS and Control Presentaion For ADB Tender (201906)scribdvindÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- 36kV LBS Manual (201906)Document30 pagini36kV LBS Manual (201906)scribdvindÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Recloser and Control Presentationn For ADB Tender (201906) PDFDocument67 paginiRecloser and Control Presentationn For ADB Tender (201906) PDFscribdvindÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Remote Access To BR-10RN-SN Using G1102 Modem (GSM)Document14 paginiRemote Access To BR-10RN-SN Using G1102 Modem (GSM)scribdvindÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- How To EE 1Document23 paginiHow To EE 1scribdvindÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- 2-Small Hydro IeslDocument5 pagini2-Small Hydro IeslscribdvindÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Pe10 11Document2 paginiPe10 11scribdvindÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Lesson 3 Power Bipolar Junction Transistor (BJT)Document45 paginiLesson 3 Power Bipolar Junction Transistor (BJT)Chacko MathewÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- LCDKeypad Shield V1.0 SCHDocument1 paginăLCDKeypad Shield V1.0 SCHJorge Luis Vega Caballero100% (1)
- Pe8 9Document2 paginiPe8 9scribdvindÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Pe1 3Document3 paginiPe1 3scribdvindÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Pe5 7Document3 paginiPe5 7scribdvindÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Post-Text PDFDocument33 paginiPost-Text PDFscribdvindÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Interfacing The Standard Parallel PortDocument17 paginiInterfacing The Standard Parallel Portshawnleegabriel100% (4)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- MicroprocessorsDocument19 paginiMicroprocessorsscribdvindÎncă nu există evaluări
- MicroprocessorsDocument12 paginiMicroprocessorsscribdvindÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- N-Split 85MHz - RBU Network Tech Presentation V10aDocument28 paginiN-Split 85MHz - RBU Network Tech Presentation V10aAntonio RondinelliÎncă nu există evaluări
- Project Report On BSNLDocument47 paginiProject Report On BSNLManish NaharÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- BJT (Bipolar Junction Transistor) : Level-1Document25 paginiBJT (Bipolar Junction Transistor) : Level-1kalyanÎncă nu există evaluări
- 2023 A - Miniaturized - Dual-Band - Dual-Polarized - Base - Station - Antenna - Loaded - With - Duplex - BalunsDocument5 pagini2023 A - Miniaturized - Dual-Band - Dual-Polarized - Base - Station - Antenna - Loaded - With - Duplex - Balunsice charcoalÎncă nu există evaluări
- Fluke 8846A - 6.5 Digit Precision MulitmeterDocument8 paginiFluke 8846A - 6.5 Digit Precision MulitmeterFaqir Khan JadoonÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Huawei eLTE Rapid System OverviewDocument10 paginiHuawei eLTE Rapid System OverviewsolihinÎncă nu există evaluări
- Pressure TransmittersDocument1 paginăPressure TransmittersIns Dehradun PriyankÎncă nu există evaluări
- Transforemer Stability Test ReportDocument11 paginiTransforemer Stability Test ReportMahmod Mohamed100% (3)
- Cmos Metal GateDocument56 paginiCmos Metal GateSubin AlexÎncă nu există evaluări
- Finlux Chassis Monoplus2 MP2 PDFDocument9 paginiFinlux Chassis Monoplus2 MP2 PDFReiner BerbesiÎncă nu există evaluări
- Electrical Curriculum (List of 1-5 Year Courses) - 1Document7 paginiElectrical Curriculum (List of 1-5 Year Courses) - 1migadÎncă nu există evaluări
- Smiths Connectors Medical BrochureDocument12 paginiSmiths Connectors Medical BrochureSmiths ConnectorsÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- EziweighDocument4 paginiEziweighBerney RyxlerÎncă nu există evaluări
- RLFDocument5 paginiRLFPritam ModakÎncă nu există evaluări
- Chapter 8 - Memory Storage Devices Question AnswersDocument4 paginiChapter 8 - Memory Storage Devices Question AnswersAditya MalhotraÎncă nu există evaluări
- Broken Wire Detector1Document1 paginăBroken Wire Detector1Miranto WallÎncă nu există evaluări
- Chapter 1Document25 paginiChapter 1TalemaÎncă nu există evaluări
- Datacom Assighment1 SoluDocument7 paginiDatacom Assighment1 SoluRediet ZemedkunÎncă nu există evaluări
- Eaw KF 730Document6 paginiEaw KF 730Joêgo Wasly Silva SoaresÎncă nu există evaluări
- BELDEN STP Cat6 PDFDocument5 paginiBELDEN STP Cat6 PDFRD LumÎncă nu există evaluări
- Aec3 PDFDocument114 paginiAec3 PDFSreeram VijapurapuÎncă nu există evaluări
- Nx204a PDFDocument2 paginiNx204a PDFArif NstÎncă nu există evaluări
- Asus ZenFone Max ZC550KL - Schematic DiagarmDocument154 paginiAsus ZenFone Max ZC550KL - Schematic Diagarmhardiantara.dt0% (1)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- SYSTRON DONNER 5000A Operation ManualDocument42 paginiSYSTRON DONNER 5000A Operation ManualRon CarlsonÎncă nu există evaluări
- SDH Commissioning TestDocument7 paginiSDH Commissioning Testangelo_lopez1993Încă nu există evaluări
- Chapter 1: Introduction To Networking: 1.1 What Is A Network?Document6 paginiChapter 1: Introduction To Networking: 1.1 What Is A Network?Marl MwegiÎncă nu există evaluări
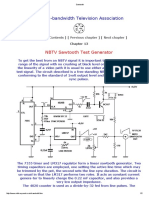
- Narrow Bandwidth Television Association: NBTV Sawtooth Test GeneratorDocument2 paginiNarrow Bandwidth Television Association: NBTV Sawtooth Test GeneratorSebastian CostaÎncă nu există evaluări
- Door Phones PDFDocument12 paginiDoor Phones PDFEPCOMUSAÎncă nu există evaluări
- Datasheet Diodos 1W y 2WDocument2 paginiDatasheet Diodos 1W y 2WAnonymous BQOxf8XX58Încă nu există evaluări
- AxesPlus Datasheet Architecture enDocument2 paginiAxesPlus Datasheet Architecture enFook YapÎncă nu există evaluări
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDe la EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsEvaluare: 5 din 5 stele5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)