S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Cooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFDocument9 paginiCooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFIkutegbe CharlesÎncă nu există evaluări
- β= T T T T E T Q Q: Tutorial Sheet 5 (Document6 paginiβ= T T T T E T Q Q: Tutorial Sheet 5 (deshrajÎncă nu există evaluări
- Shock and Vibration PDFDocument211 paginiShock and Vibration PDFEnrique Lopez De ArroyabeÎncă nu există evaluări
- Physics Mechanics Help BookletDocument88 paginiPhysics Mechanics Help Bookletdj7597100% (1)
- Ee - Electromagnetic Theory PDFDocument86 paginiEe - Electromagnetic Theory PDFSh. ANUJ KUMAR SHARMAÎncă nu există evaluări
- smts-2 Theory of Structures by B.C. Punmia Text PDFDocument497 paginismts-2 Theory of Structures by B.C. Punmia Text PDFAman Dubey100% (1)
- Earth Spin Sun OrbitDocument4 paginiEarth Spin Sun Orbitmrshong5bÎncă nu există evaluări
- Narayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalDocument17 paginiNarayana 23-06-2022 Outgoing SR Jee Main Model GTM 18 QP FinalShreyas VedantiÎncă nu există evaluări
- United States Patent: (10) Patent No.: US 7482,597 B2Document22 paginiUnited States Patent: (10) Patent No.: US 7482,597 B2JustaUser2Încă nu există evaluări
- Applied Physics LabDocument59 paginiApplied Physics LabEngr Waqas MalikÎncă nu există evaluări
- Unit-IV - Voli. 2 Polyphase TransformersDocument74 paginiUnit-IV - Voli. 2 Polyphase Transformersvasu_koneti5124Încă nu există evaluări
- CHM 102 NotesDocument38 paginiCHM 102 NotesagboanthonyokpeÎncă nu există evaluări
- ArmatureDocument3 paginiArmatureJORDAN FREEÎncă nu există evaluări
- ME 218 - Spring 2018 - Week05 HandoutDocument7 paginiME 218 - Spring 2018 - Week05 HandoutNitin BhatiÎncă nu există evaluări
- Lecture VIII: Fourier Series: Maxim RaginskyDocument20 paginiLecture VIII: Fourier Series: Maxim RaginskyShakil Safin OrthoÎncă nu există evaluări
- Nguyễn Duy Đức - 1781110206Document30 paginiNguyễn Duy Đức - 1781110206Nguyễn Duy ĐứcÎncă nu există evaluări
- 10 Aberration Theory Part IDocument42 pagini10 Aberration Theory Part IxbÎncă nu există evaluări
- An Efficient, Two-Dimensional Implementation of The Ffowcs Williams and Hawkings EquationDocument15 paginiAn Efficient, Two-Dimensional Implementation of The Ffowcs Williams and Hawkings EquationEdemar Morsch FilhoÎncă nu există evaluări
- The Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFDocument17 paginiThe Seepage Control of The Tunnel Excavated in High-Pressure Water Condition Using Multiple Times Grouting Method PDFMarsheal FisongaÎncă nu există evaluări
- CFD With Opensource Software: Non-Newtonian Models in Openfoam Implementation of A Non-Newtonian ModelDocument19 paginiCFD With Opensource Software: Non-Newtonian Models in Openfoam Implementation of A Non-Newtonian ModelDino DinoÎncă nu există evaluări
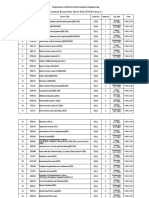
- Terminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringDocument6 paginiTerminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringMuhammad Zaeem AkmalÎncă nu există evaluări
- Hulliger 1994Document20 paginiHulliger 1994Tatiana TrujilloÎncă nu există evaluări
- Insulation Resistance Testing: Application NoteDocument8 paginiInsulation Resistance Testing: Application Notefernando_aragon2001Încă nu există evaluări
- Mic Sensitivity and DB ConvertorDocument20 paginiMic Sensitivity and DB ConvertorDebarghya BhattacharyaÎncă nu există evaluări
- Turning-Moment Diagrams and FlywheelDocument35 paginiTurning-Moment Diagrams and FlywheelKartik BhararaÎncă nu există evaluări
- Problems CH 2Document7 paginiProblems CH 2Oec EngÎncă nu există evaluări
- Electrical Engineering ProblemsDocument128 paginiElectrical Engineering ProblemsMannyÎncă nu există evaluări
- 123Document16 pagini123Jj MontillaÎncă nu există evaluări
- Fundamentals of PFC CorrectionDocument24 paginiFundamentals of PFC Correctionsuji100% (1)
- Fom Lec Week 6Document35 paginiFom Lec Week 6nishan_ravin0% (1)