S-ar putea să vă placă și
- Mecanica de Los Medios Continuos Unidad 4 (2) SAMMYDocument26 paginiMecanica de Los Medios Continuos Unidad 4 (2) SAMMYzaly robleroÎncă nu există evaluări
- 3.4. Deformaciones Por Rotación, Deformación Lineal y Angular, 3.5. Deformaciones y Direcciones Principales y 3.6. Ecuaciones de CompatibilidadDocument36 pagini3.4. Deformaciones Por Rotación, Deformación Lineal y Angular, 3.5. Deformaciones y Direcciones Principales y 3.6. Ecuaciones de CompatibilidadAlan SepúlvedaÎncă nu există evaluări
- Estado de DeformaciónDocument7 paginiEstado de DeformaciónRex RyogaÎncă nu există evaluări
- Descripción Matemática de La DeformaciónDocument4 paginiDescripción Matemática de La DeformaciónNandaly GarcíaÎncă nu există evaluări
- Trabajo3 1Document35 paginiTrabajo3 1Ailadi TorresÎncă nu există evaluări
- 4 Estados de DeformacionDocument16 pagini4 Estados de DeformacionArturo CansecoÎncă nu există evaluări
- Unidad 4 Equipo5 F.M.M.CDocument21 paginiUnidad 4 Equipo5 F.M.M.CAndry-6193Încă nu există evaluări
- Actividad3.2 CruzBasultoDanielDocument19 paginiActividad3.2 CruzBasultoDanielDaniel Cruz BasultoÎncă nu există evaluări
- Actividad3.2 CruzBasultoDanielDocument19 paginiActividad3.2 CruzBasultoDanielDaniel Cruz BasultoÎncă nu există evaluări
- Tecnológico Nacional de México Instituto Tecnológico de TapachulaDocument21 paginiTecnológico Nacional de México Instituto Tecnológico de Tapachulayetter moralesÎncă nu există evaluări
- 3.2. - Descripción Matemática de La Deformación y 3.3. - Tensor de Deformación para Deformaciones Infinitesimales y Desplazamientos Pequeños - Fernando LópezDocument17 pagini3.2. - Descripción Matemática de La Deformación y 3.3. - Tensor de Deformación para Deformaciones Infinitesimales y Desplazamientos Pequeños - Fernando LópezFernando LopezÎncă nu există evaluări
- 4.5 Deformaciones Y Direcciones PrincipalesDocument8 pagini4.5 Deformaciones Y Direcciones Principalesmayjo100% (2)
- Estado de DeformaciónDocument8 paginiEstado de DeformaciónCarlos Gonzaga AmbrosioÎncă nu există evaluări
- Estados de DeformaciónDocument13 paginiEstados de DeformaciónDennis Lara0% (2)
- Estado de Deformacion Unidad 3Document11 paginiEstado de Deformacion Unidad 3Gino ReyesÎncă nu există evaluări
- Unidad 4 Estado de Deformaciones PDFDocument36 paginiUnidad 4 Estado de Deformaciones PDFCarlos Perez100% (1)
- Elementos de Mecanica Del Medio ContinuoDocument8 paginiElementos de Mecanica Del Medio ContinuoHector SeguraÎncă nu există evaluări
- Derivadas ParcialesDocument33 paginiDerivadas ParcialesEdgar CoetoÎncă nu există evaluări
- Laplace en Ing Civil Uaccccc VDocument10 paginiLaplace en Ing Civil Uaccccc Vcarlos incaroca100% (1)
- Tensión y DeformaciónDocument6 paginiTensión y DeformaciónJhosephFlorRiveraÎncă nu există evaluări
- Ap de Laplace en Ing CivilDocument10 paginiAp de Laplace en Ing Civilcarlos incarocaÎncă nu există evaluări
- Instituto Tecnológico de TapachulaDocument15 paginiInstituto Tecnológico de TapachulaJavier Morales VelascoÎncă nu există evaluări
- Resort EsDocument15 paginiResort EsMarco Flores CorpusÎncă nu există evaluări
- LECCIÓN 10 - 1 PLACAS - ModifDocument25 paginiLECCIÓN 10 - 1 PLACAS - ModifPedroAgustínRodríguezIzquierdoÎncă nu există evaluări
- Deformaciones en La Flexion 1Document31 paginiDeformaciones en La Flexion 1gustavo emmanuel diaz-abrahanÎncă nu există evaluări
- Módulo 8 (Inestabilidad Elástica)Document52 paginiMódulo 8 (Inestabilidad Elástica)Hugo Alberto Sosa Chavez100% (1)
- Las Ecuaciones de LameDocument7 paginiLas Ecuaciones de LameAnonymous Peru100% (1)
- Tareas Fenomenos1Document19 paginiTareas Fenomenos1Lin Leon100% (1)
- Ecuaciones Diferenciales Orden SuperiorDocument8 paginiEcuaciones Diferenciales Orden SuperiorPaul VitoÎncă nu există evaluări
- Aplicacion de ED de Orden SuperionDocument28 paginiAplicacion de ED de Orden SuperionStalyn PilamungaÎncă nu există evaluări
- Modulos DinamicosDocument10 paginiModulos DinamicosCarlos BelmarÎncă nu există evaluări
- Diapositivas de Deflexion de VigasDocument21 paginiDiapositivas de Deflexion de Vigasmarcelo montaña rangelÎncă nu există evaluări
- Informe ResortesDocument14 paginiInforme ResortesPrice Sanchez JoseÎncă nu există evaluări
- 3.4 Tensor de Deformaciones InfinitesimalesDocument14 pagini3.4 Tensor de Deformaciones InfinitesimalesJesus UGÎncă nu există evaluări
- Proyecto de Investigacion de Laboratorio de Fisica IDocument12 paginiProyecto de Investigacion de Laboratorio de Fisica IJean Lopez JesusÎncă nu există evaluări
- Vigas Con Eje CurvoDocument23 paginiVigas Con Eje CurvoAlexander Valera Chupillon100% (2)
- Tarea 5 MecanicaDocument13 paginiTarea 5 MecanicaHugo RodríguezÎncă nu există evaluări
- Ecuacion Diferencial - Trabajdo de CamperoDocument10 paginiEcuacion Diferencial - Trabajdo de CamperoLuis FajardoÎncă nu există evaluări
- Balances MicroscopicosDocument25 paginiBalances MicroscopicosFrancisco TausÎncă nu există evaluări
- DeformacionDocument14 paginiDeformacionKarinaPazÎncă nu există evaluări
- Ecuacion de OndaDocument18 paginiEcuacion de Ondajf.vilaÎncă nu există evaluări
- Tensor de Deformacion para DeformacionesDocument5 paginiTensor de Deformacion para DeformacionesBetza Neymar JR Vargas100% (4)
- Aplicaicon de Laplace en Ing CivilDocument8 paginiAplicaicon de Laplace en Ing Civilcarlos incarocaÎncă nu există evaluări
- Grandes DeformacionesDocument6 paginiGrandes DeformacionesMoisés Vázquez Toledo100% (1)
- Resortes HPDocument12 paginiResortes HPMoisés MartínÎncă nu există evaluări
- Resortes HPDocument17 paginiResortes HPFog0% (1)
- Scilación de Un Líquido en Un Tubo en UDocument17 paginiScilación de Un Líquido en Un Tubo en UCarlos Tintayo TorresÎncă nu există evaluări
- Tecnica de Residuos PonderadosDocument186 paginiTecnica de Residuos PonderadosJhony PosadaÎncă nu există evaluări
- 10 Revisión de Estática Nota Principales PDFDocument22 pagini10 Revisión de Estática Nota Principales PDFFRANCISCO AGUSTIN ORTIZÎncă nu există evaluări
- Deformacion Unitaria PlanaDocument40 paginiDeformacion Unitaria PlanaJessica Gonzalez Garzon33% (3)
- Aplicaciones de Ecuaciones DiferencialesDocument9 paginiAplicaciones de Ecuaciones DiferencialesJuan TorresÎncă nu există evaluări
- T3 Calculo IVDocument12 paginiT3 Calculo IVJuan Angel Chegne QuispeÎncă nu există evaluări
- HLKHKDocument17 paginiHLKHKLuc VilcaÎncă nu există evaluări
- Deformaciones Simétricas Alrededor de Un EjeDocument7 paginiDeformaciones Simétricas Alrededor de Un EjegnocamÎncă nu există evaluări
- Aplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorDocument23 paginiAplicaciones de Las Ecuaciones Diferenciales de Orden SuperiorSoporteFM Proceso0% (1)
- Módulo: Deflexiones en VigasDocument90 paginiMódulo: Deflexiones en VigasKevin Js RamirezÎncă nu există evaluări
- Basicos de CimbraDocument2 paginiBasicos de CimbraAndry-6193Încă nu există evaluări
- Cuadrillas de TrabajoDocument2 paginiCuadrillas de TrabajoAndry-61930% (1)
- Cuadrillas de TrabajoDocument2 paginiCuadrillas de TrabajoAndry-6193Încă nu există evaluări
- Costos y PresupuestosDocument11 paginiCostos y PresupuestosAndry-6193Încă nu există evaluări
- Cuadrilla SDocument12 paginiCuadrilla SAndry-6193Încă nu există evaluări
- Basicos de ConcretoDocument6 paginiBasicos de ConcretoAndry-6193Încă nu există evaluări
- PRESUPUESTODocument3 paginiPRESUPUESTOAndry-6193Încă nu există evaluări
- Libro 2Document3 paginiLibro 2Andry-6193Încă nu există evaluări
- Transporte UrbanoDocument10 paginiTransporte UrbanoAndry-6193Încă nu există evaluări
- Definicion de Numero ComplejoDocument3 paginiDefinicion de Numero ComplejoAndry-6193Încă nu există evaluări
- Mapa Conceptual - Costos y PresupuestosDocument1 paginăMapa Conceptual - Costos y PresupuestosAndry-6193Încă nu există evaluări
- DiplomasDocument3 paginiDiplomasAndry-6193Încă nu există evaluări
- Desarrollo SustentableDocument8 paginiDesarrollo SustentableAndry-6193Încă nu există evaluări
- Trabajo de Investigacion III UNIDADDocument14 paginiTrabajo de Investigacion III UNIDADAndry-6193Încă nu există evaluări
- Unidad 5 Equipo5 F.M.M.CDocument24 paginiUnidad 5 Equipo5 F.M.M.CAndry-61930% (1)
- Concreto FrescoDocument3 paginiConcreto FrescoAndry-6193Încă nu există evaluări
- Mapa Conceptual CarreterasDocument1 paginăMapa Conceptual CarreterasAndry Messi LopezÎncă nu există evaluări
- Concreto FrescoDocument3 paginiConcreto FrescoAndry-6193Încă nu există evaluări
- Intro Ducci OnDocument2 paginiIntro Ducci OnAndry-6193Încă nu există evaluări
- Unidad 4Document18 paginiUnidad 4Andry-6193Încă nu există evaluări
- SUSTENTABILIDADDocument9 paginiSUSTENTABILIDADAndry-6193Încă nu există evaluări
- Unidad 4 Equipo5 F.M.M.CDocument21 paginiUnidad 4 Equipo5 F.M.M.CAndry-6193Încă nu există evaluări
- Proyecto Adoquines Mecanica de SuelosDocument11 paginiProyecto Adoquines Mecanica de SuelosAndry-6193Încă nu există evaluări
- Proyecto Adoquines Mecanica de SuelosDocument9 paginiProyecto Adoquines Mecanica de SuelosAndry-6193Încă nu există evaluări
- I. Generalidades Del TransporteDocument17 paginiI. Generalidades Del TransporteAndry-6193100% (1)
- I. Generalidades de La Maq PesadaDocument22 paginiI. Generalidades de La Maq PesadaAndry-6193Încă nu există evaluări
- II. Caract y Aplic de La Maq PesadaDocument31 paginiII. Caract y Aplic de La Maq PesadaAndry-6193Încă nu există evaluări
- II. Transporte UrbanoDocument18 paginiII. Transporte UrbanoAndry-6193Încă nu există evaluări
- Fredy Reporte 3ra Unidad de MecanicadocxDocument15 paginiFredy Reporte 3ra Unidad de MecanicadocxAndry-6193Încă nu există evaluări
- Programa de Mantenimiento - Robot 4210 Serie 490701518Document11 paginiPrograma de Mantenimiento - Robot 4210 Serie 490701518Cesar EduardoÎncă nu există evaluări
- Sistema de Riel Común o Cammon RailDocument10 paginiSistema de Riel Común o Cammon Railsebastian ordenes olivaÎncă nu există evaluări
- Informe Técnico Del Cami 116Document4 paginiInforme Técnico Del Cami 116Luis Arturo Arenales MaytaÎncă nu există evaluări
- Examen Final - Semana 8 - CB - PRIMER BLOQUE-FLUIDOS Y TERMODINAMICA - (GRUPO1)Document5 paginiExamen Final - Semana 8 - CB - PRIMER BLOQUE-FLUIDOS Y TERMODINAMICA - (GRUPO1)miguelÎncă nu există evaluări
- Calderas PirotubularesDocument9 paginiCalderas PirotubularesJunior C. ArrigoniÎncă nu există evaluări
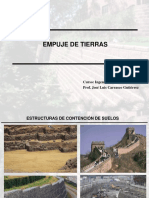
- 3.1 Empuje de TierrasDocument26 pagini3.1 Empuje de TierrasSharonÎncă nu există evaluări
- Motor SincronoDocument25 paginiMotor SincronoHenry HuarsoccaÎncă nu există evaluări
- Oferta SEDENADocument75 paginiOferta SEDENAJazmin CardenasÎncă nu există evaluări
- LT200HP 140610 EsDocument73 paginiLT200HP 140610 Esfaviojjgl67% (6)
- Germán Noches Tarea 6Document6 paginiGermán Noches Tarea 6todokonectoresÎncă nu există evaluări
- Metrado CRP - 7 - PucacanchaDocument9 paginiMetrado CRP - 7 - PucacanchaGabriela QHÎncă nu există evaluări
- Proyecto de AutomatizaciónDocument10 paginiProyecto de AutomatizaciónCesar Imba AÎncă nu există evaluări
- Dinamica de Los SatelitesDocument5 paginiDinamica de Los SatelitesRuddy MoranteÎncă nu există evaluări
- Corrección PVT - Combinado - Bo - RsDocument5 paginiCorrección PVT - Combinado - Bo - RsFarah FaizÎncă nu există evaluări
- CINEMÁTICA DE LOS ROBOTS Y SU APLICACIÓN EN EL DISEÑO - Alcudia Segura, de Dios Hernández, Méndez SánchezDocument3 paginiCINEMÁTICA DE LOS ROBOTS Y SU APLICACIÓN EN EL DISEÑO - Alcudia Segura, de Dios Hernández, Méndez SánchezCarlos HernandezÎncă nu există evaluări
- Formulario FluidosDocument1 paginăFormulario FluidosCollazemosÎncă nu există evaluări
- Capitulo 10 Sección 07 Cojinetes y SellosDocument12 paginiCapitulo 10 Sección 07 Cojinetes y SellosJosue Fernandez MarquezÎncă nu există evaluări
- ds40cs EsDocument2 paginids40cs EsdanieldayettddÎncă nu există evaluări
- CR85RDocument8 paginiCR85RAlex TejadaÎncă nu există evaluări
- Informe Final Disipadores de Energia 2017 0 PDFDocument62 paginiInforme Final Disipadores de Energia 2017 0 PDFBryan LLaferÎncă nu există evaluări
- Taller MF Energía y Momentum IDocument2 paginiTaller MF Energía y Momentum IJorge CortinaÎncă nu există evaluări
- 6-Manual Mantenimiento PDFDocument8 pagini6-Manual Mantenimiento PDFMAQUINARIAPESADA100% (1)
- Cubo de ReynoldsDocument3 paginiCubo de ReynoldsxDzurdO100% (1)
- IPERDocument17 paginiIPERartuvasquezÎncă nu există evaluări
- Diseño de Pavimento Rígido - Pca - Uap - Expo - Grupo 7Document51 paginiDiseño de Pavimento Rígido - Pca - Uap - Expo - Grupo 7RITTERÎncă nu există evaluări
- Volantes de InerciaDocument4 paginiVolantes de Inerciawylly0034Încă nu există evaluări
- S10MRMDocument28 paginiS10MRMMilan Alessandro Lavado JaraÎncă nu există evaluări
- XENTRY Portal - Arboles de Cambiosc PDFDocument25 paginiXENTRY Portal - Arboles de Cambiosc PDFdanielvepÎncă nu există evaluări
- Cilindro HidráulicoDocument4 paginiCilindro HidráulicoBRIAN RODRIGUEZ PENUELAÎncă nu există evaluări
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe la EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleEvaluare: 5 din 5 stele5/5 (3)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe la EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosÎncă nu există evaluări
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe la EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalEvaluare: 5 din 5 stele5/5 (3)
- Didáctica de la matemática en la escuela primariaDe la EverandDidáctica de la matemática en la escuela primariaEvaluare: 2.5 din 5 stele2.5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe la EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraEvaluare: 4.5 din 5 stele4.5/5 (5)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe la EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasEvaluare: 5 din 5 stele5/5 (4)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe la EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaEvaluare: 5 din 5 stele5/5 (5)
- Guía práctica para la refracción ocularDe la EverandGuía práctica para la refracción ocularEvaluare: 5 din 5 stele5/5 (2)
- Proyectos de instalaciones eléctrica de baja tensiónDe la EverandProyectos de instalaciones eléctrica de baja tensiónEvaluare: 5 din 5 stele5/5 (1)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe la EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadEvaluare: 4.5 din 5 stele4.5/5 (14)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe la EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasEvaluare: 5 din 5 stele5/5 (1)
- Física paso a paso: Más de 100 problemas resueltosDe la EverandFísica paso a paso: Más de 100 problemas resueltosEvaluare: 4 din 5 stele4/5 (12)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe la EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosEvaluare: 5 din 5 stele5/5 (1)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe la EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiEvaluare: 3.5 din 5 stele3.5/5 (5)
- Armónicas en Sistemas Eléctricos IndustrialesDe la EverandArmónicas en Sistemas Eléctricos IndustrialesEvaluare: 4.5 din 5 stele4.5/5 (12)
- Convertidores conmutados de potencia: Test de autoevaluaciónDe la EverandConvertidores conmutados de potencia: Test de autoevaluaciónEvaluare: 5 din 5 stele5/5 (1)
- Universo cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.De la EverandUniverso cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.Încă nu există evaluări