S-ar putea să vă placă și
- Computer Architecture Question PaperDocument14 paginiComputer Architecture Question Paperheaughfrds100% (1)
- Jan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Document6 paginiJan Marie Veatrice M. Pacia 4-ECE: What Are Cisc and Risc Architecture? How Do They Differ From Each Other?Jan Marie Veatrice PaciaÎncă nu există evaluări
- Processor Types: RISC Processor RISC Stands For Reduced Instruction SetDocument9 paginiProcessor Types: RISC Processor RISC Stands For Reduced Instruction SetDebashish RoyÎncă nu există evaluări
- Reduced Instruction Set Computing (RISC) : Li-Chuan FangDocument42 paginiReduced Instruction Set Computing (RISC) : Li-Chuan FangDevang PatelÎncă nu există evaluări
- Input Unit: Five Basic Components of Computer SystemDocument9 paginiInput Unit: Five Basic Components of Computer SystemJefin PaulÎncă nu există evaluări
- CA Classes-106-110Document5 paginiCA Classes-106-110SrinivasaRaoÎncă nu există evaluări
- Chapter 2 Lecture 6Document30 paginiChapter 2 Lecture 6Gebrie BeleteÎncă nu există evaluări
- Computer Architecture 2 MarksDocument32 paginiComputer Architecture 2 MarksArchanavgs0% (1)
- ASIC Design of MIPS Based RISC Processor For High PerformanceDocument7 paginiASIC Design of MIPS Based RISC Processor For High PerformanceShrinidhi RaoÎncă nu există evaluări
- Computer Architecture Lesson 2 (Instruction Set Architecture)Document9 paginiComputer Architecture Lesson 2 (Instruction Set Architecture)ghassanÎncă nu există evaluări
- Risc VDocument4 paginiRisc VOlhaÎncă nu există evaluări
- Risc VDocument5 paginiRisc VOlhaÎncă nu există evaluări
- UNIT-1 Introduction To MicrocontrollersDocument8 paginiUNIT-1 Introduction To MicrocontrollerssupriyaÎncă nu există evaluări
- Cyan 2800398239029h09fn0ivj0vcjb0Document16 paginiCyan 2800398239029h09fn0ivj0vcjb0Anonymous zWBss8LKÎncă nu există evaluări
- CA 2mark and 16 Mark With AnswerDocument112 paginiCA 2mark and 16 Mark With AnswerOmprakash DÎncă nu există evaluări
- Coa Unit - 5 NotesDocument6 paginiCoa Unit - 5 Notes1NT19IS077-MADHURI.CÎncă nu există evaluări
- 16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLDocument64 pagini16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLchandra sekhar100% (1)
- Lecture 2 Basic CPU ArchitecturesDocument7 paginiLecture 2 Basic CPU ArchitecturesMohan Krishna Reddy KarriÎncă nu există evaluări
- Session2 - Introduction To RISC and CISCDocument4 paginiSession2 - Introduction To RISC and CISCHillary MurungaÎncă nu există evaluări
- The Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItDocument11 paginiThe Simplest Way To Examine The Advantages and Disadvantages of RISC Architecture Is by Contrasting It With ItsaadawarÎncă nu există evaluări
- Reduced Instruction Set Computer (RISC) : Presented ToDocument11 paginiReduced Instruction Set Computer (RISC) : Presented ToAmrÎncă nu există evaluări
- Computer ArchitectureDocument125 paginiComputer Architecturebalaji bala100% (1)
- Project-1 Basic Architecture DesignDocument4 paginiProject-1 Basic Architecture DesignUmesh KumarÎncă nu există evaluări
- Lecture 18 - RICS and CISC PropertiesDocument8 paginiLecture 18 - RICS and CISC PropertiesPragya SinghÎncă nu există evaluări
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyDocument45 paginiP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaÎncă nu există evaluări
- Advanced Computer Architecture 1 1Document118 paginiAdvanced Computer Architecture 1 1SharathMenonÎncă nu există evaluări
- CA 2mark and 16 Mark With AnswerDocument109 paginiCA 2mark and 16 Mark With AnswerJagadeesh Mohan100% (1)
- MICROPROCESSORSDocument10 paginiMICROPROCESSORSKELVIN MUTHINIÎncă nu există evaluări
- Assignment 4: Course Instructor / Lab EngineerDocument8 paginiAssignment 4: Course Instructor / Lab EngineerNitasha HumaÎncă nu există evaluări
- MIPS Report FileDocument17 paginiMIPS Report FileAayushiÎncă nu există evaluări
- Microcoded ArchDocument12 paginiMicrocoded ArchAnonymous pHi4dXÎncă nu există evaluări
- 17 Bit Implementation For Dual Core Risc ArchitectureDocument6 pagini17 Bit Implementation For Dual Core Risc ArchitecturelambanaveenÎncă nu există evaluări
- CAO Unit IIIDocument29 paginiCAO Unit IIIshivaniÎncă nu există evaluări
- 2 16 1350130228 7. Flexible Wireless DataDocument6 pagini2 16 1350130228 7. Flexible Wireless DataSumeet SauravÎncă nu există evaluări
- Implementation of 5-Stage 32-Bit Microprocessor Based Without Interlocked Pipelining StagesDocument5 paginiImplementation of 5-Stage 32-Bit Microprocessor Based Without Interlocked Pipelining Stagesashish jhaÎncă nu există evaluări
- Design and Implementation of RISC MIPS Processor On FPGADocument7 paginiDesign and Implementation of RISC MIPS Processor On FPGAIJRASETPublicationsÎncă nu există evaluări
- Lecture 3Document12 paginiLecture 3MUHAMMAD RAHEEL BSSE-FA20-100Încă nu există evaluări
- Microcontrollers and Embedded Systems - 1Document29 paginiMicrocontrollers and Embedded Systems - 1Vijay Jatti100% (1)
- Microprocessor 8085&86Document38 paginiMicroprocessor 8085&86anil gaurÎncă nu există evaluări
- Ca Unit 4 PrabuDocument24 paginiCa Unit 4 Prabu6109 Sathish Kumar JÎncă nu există evaluări
- DSP Mod 6Document6 paginiDSP Mod 6Aabha KadamÎncă nu există evaluări
- AOK Lecture03 PDFDocument28 paginiAOK Lecture03 PDFAndre SetiawanÎncă nu există evaluări
- Cisc Vs Risc: Multiplying Two Numbers in MemoryDocument4 paginiCisc Vs Risc: Multiplying Two Numbers in MemoryItz Sami UddinÎncă nu există evaluări
- CAM Tutorial 1Document15 paginiCAM Tutorial 1ram010Încă nu există evaluări
- Lecture Notes-Computer Architecture-Module 1Document20 paginiLecture Notes-Computer Architecture-Module 1mokshagnanare26Încă nu există evaluări
- 03 Cisc RiscDocument37 pagini03 Cisc RiscahmedÎncă nu există evaluări
- Introduction To Embedded SystemsDocument11 paginiIntroduction To Embedded SystemsNikhith ReddyÎncă nu există evaluări
- ISA ModelsDocument5 paginiISA ModelsFahad Tanveer MalikÎncă nu există evaluări
- Risc PropertiesDocument2 paginiRisc PropertiesSwetha RamÎncă nu există evaluări
- Risc Processor Using VHDLDocument5 paginiRisc Processor Using VHDLAruna RajanÎncă nu există evaluări
- $RS2V09GDocument12 pagini$RS2V09GKUMUD KESARÎncă nu există evaluări
- Computer System Organizations: Ms - Chit Su MonDocument74 paginiComputer System Organizations: Ms - Chit Su MonAjharuddin AnsariÎncă nu există evaluări
- Design of A 32-Bit Dual Pipeline Superscalar RISC-V Processor On FPGADocument4 paginiDesign of A 32-Bit Dual Pipeline Superscalar RISC-V Processor On FPGASRIRAAM VSÎncă nu există evaluări
- Computer ArchitectureDocument4 paginiComputer ArchitectureAgrippa MungaziÎncă nu există evaluări
- Computer Architecture Unit V - Advanced Architecture Part-ADocument4 paginiComputer Architecture Unit V - Advanced Architecture Part-AJennifer PeterÎncă nu există evaluări
- Instruction Set ArchitectureDocument4 paginiInstruction Set ArchitectureashuÎncă nu există evaluări
- Computer OrganizationDocument5 paginiComputer OrganizationSARFRAZÎncă nu există evaluări
- RISC Vs CISC, Harvard V/s Van NeumannDocument35 paginiRISC Vs CISC, Harvard V/s Van NeumannVRAJ PATELÎncă nu există evaluări
- Crusoe Is The New Microprocessor Which Has Been Designed Specially For TheDocument17 paginiCrusoe Is The New Microprocessor Which Has Been Designed Specially For TheDivya KalidindiÎncă nu există evaluări
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDe la EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationÎncă nu există evaluări
- Gentech Practice QuestionsDocument18 paginiGentech Practice QuestionsAsok KumarÎncă nu există evaluări
- AE05 SolDocument135 paginiAE05 SolVipul MahajanÎncă nu există evaluări
- AE05 SolDocument135 paginiAE05 SolVipul MahajanÎncă nu există evaluări
- Antenna Objective QuestionsDocument8 paginiAntenna Objective QuestionsAkanksha Dixit ManodhyaÎncă nu există evaluări
- Dac 08Document4 paginiDac 08Akanksha Dixit ManodhyaÎncă nu există evaluări
- STK500 User GuideDocument61 paginiSTK500 User Guidetest202121Încă nu există evaluări
- VHDL Vs VerilogDocument16 paginiVHDL Vs Verilogmnpaliwal020Încă nu există evaluări
- Cloud ComputingDocument30 paginiCloud ComputingAjit K SharmaÎncă nu există evaluări
- Ec 2010Document16 paginiEc 2010Shubham KaushikÎncă nu există evaluări
- A Highly Configurable Cache Architecture For EmbeddedDocument29 paginiA Highly Configurable Cache Architecture For EmbeddedmoninsuranaÎncă nu există evaluări
- CDMA Vs GSMDocument5 paginiCDMA Vs GSMEbenezer AnnanÎncă nu există evaluări
- Ax 3000Document12 paginiAx 3000Colvin SergioÎncă nu există evaluări
- DocumentDocument11 paginiDocumentrakesh hiremathÎncă nu există evaluări
- PotentiometerDocument12 paginiPotentiometerkarthikeyan19470% (1)
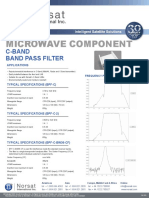
- Microwave Component: C-Band Band Pass FilterDocument1 paginăMicrowave Component: C-Band Band Pass FilterFelipe DeleonÎncă nu există evaluări
- cx5200 enDocument79 paginicx5200 enJosé Francisco MiguelÎncă nu există evaluări
- AGPTek PID Controller PC17 User ManualDocument2 paginiAGPTek PID Controller PC17 User Manualrmorenodx4587Încă nu există evaluări
- Simocode Pro CDocument2 paginiSimocode Pro CHowk RiosÎncă nu există evaluări
- Course Outline - ME 1287 (AUST)Document2 paginiCourse Outline - ME 1287 (AUST)Adnan Shahariar AnikÎncă nu există evaluări
- Ef4202 7Document1 paginăEf4202 7SON100% (2)
- Fluke 8846A - 6.5 Digit Precision MulitmeterDocument8 paginiFluke 8846A - 6.5 Digit Precision MulitmeterFaqir Khan JadoonÎncă nu există evaluări
- Power Electronics-2 MarksDocument12 paginiPower Electronics-2 Marks20EUEE053- MADHUBALAN.SÎncă nu există evaluări
- Hipath 1100 Hipath 1120 Hipath 1150 Hipath 1190: Service ManualDocument389 paginiHipath 1100 Hipath 1120 Hipath 1150 Hipath 1190: Service ManualLuis Suarez100% (1)
- ER TFTV070 3 - DatasheetDocument24 paginiER TFTV070 3 - DatasheetOvidiu ZlatianÎncă nu există evaluări
- Juniper ACX DatasheetDocument7 paginiJuniper ACX Datasheetmach75Încă nu există evaluări
- Product Data Sheet: Control Unit Micrologic 5.0 A, For Masterpact NT/ NW, LSI ProtectionsDocument3 paginiProduct Data Sheet: Control Unit Micrologic 5.0 A, For Masterpact NT/ NW, LSI ProtectionsEvandro PavesiÎncă nu există evaluări
- MS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Document65 paginiMS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Carlos GomesÎncă nu există evaluări
- Oven PM Time Reduction Thru Mantle Heater Upgrade - 24th ASEMEP NATIONAL TECHNICAL SYMPOSIUM (ANTS) PDFDocument4 paginiOven PM Time Reduction Thru Mantle Heater Upgrade - 24th ASEMEP NATIONAL TECHNICAL SYMPOSIUM (ANTS) PDFMarcelino SanicoÎncă nu există evaluări
- SIFANG CSC-103 V1.41 Line PTT User Manual ENUDocument7 paginiSIFANG CSC-103 V1.41 Line PTT User Manual ENURaúlEmirGutiérrezLópezÎncă nu există evaluări
- Toshiba 26W330D LCDTVDocument66 paginiToshiba 26W330D LCDTVvideosonÎncă nu există evaluări
- Multimeter TutorialDocument36 paginiMultimeter Tutoriallam266Încă nu există evaluări
- Modem and Its CharacteristicsDocument14 paginiModem and Its CharacteristicsLeman CavadovaÎncă nu există evaluări
- FM 8900S PDFDocument4 paginiFM 8900S PDFsridharÎncă nu există evaluări
- 8-Port Gpon Olt: Compact High Performance GPON OLT For Medium and Small OperatorDocument5 pagini8-Port Gpon Olt: Compact High Performance GPON OLT For Medium and Small Operatordevsa ityÎncă nu există evaluări
- Wiring SMC in Delta - 3.3Document4 paginiWiring SMC in Delta - 3.3juanmeza65Încă nu există evaluări
- TamagawaDocument35 paginiTamagawadfu5346Încă nu există evaluări
- Different Types of Fuses and Its ApplicationsDocument10 paginiDifferent Types of Fuses and Its ApplicationsAhmet MehmetÎncă nu există evaluări
- Physics Project WorkDocument15 paginiPhysics Project WorkSidhant KaushikÎncă nu există evaluări
- HQ Mayor 12-02-2020Document7 paginiHQ Mayor 12-02-2020jesseferrerkÎncă nu există evaluări
- Thyrotronic en PDFDocument8 paginiThyrotronic en PDFAsim KaleemÎncă nu există evaluări