S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Guard-I CatalogueDocument2 paginiGuard-I CatalogueNadeem UddinÎncă nu există evaluări
- FlannDocument8 paginiFlannNadeem UddinÎncă nu există evaluări
- Home DIALUXDocument5 paginiHome DIALUXNadeem UddinÎncă nu există evaluări
- Hop FieldDocument9 paginiHop FieldGowthamUcekÎncă nu există evaluări
- Application For Supply of Electricity at Low Tension: Affix The Passport Photo of ApplicantDocument5 paginiApplication For Supply of Electricity at Low Tension: Affix The Passport Photo of ApplicantNadeem UddinÎncă nu există evaluări
- Fault Analysis FinalDocument18 paginiFault Analysis FinalNadeem Uddin100% (1)
- PAN Discontinuance HW Series PCN 20121019 2Document1 paginăPAN Discontinuance HW Series PCN 20121019 2Nadeem UddinÎncă nu există evaluări
- M.tech Mid 1 Time TableDocument1 paginăM.tech Mid 1 Time TableNadeem UddinÎncă nu există evaluări
- 9A02504 Power ElectronicsDocument4 pagini9A02504 Power ElectronicssivabharathamurthyÎncă nu există evaluări
- Research of Intelligent Lead-Acid Batteries ChargeDocument8 paginiResearch of Intelligent Lead-Acid Batteries Chargeerode els erodeÎncă nu există evaluări
- INTRODUCTION TO CONTRO SYSTEM Book PDFDocument395 paginiINTRODUCTION TO CONTRO SYSTEM Book PDFahmadÎncă nu există evaluări
- LG Air Conditioner: MULTI F/FDX SeriesDocument20 paginiLG Air Conditioner: MULTI F/FDX Seriesluutai1402Încă nu există evaluări
- BITS Pilani ENI E&I BE-EIE Courses Description PDFDocument7 paginiBITS Pilani ENI E&I BE-EIE Courses Description PDFtarang27100% (1)
- KSG SeriesDocument29 paginiKSG SeriesArda ISMURATLARÎncă nu există evaluări
- Data IN OUT - Tugas TML (Albyalbert-1Document76 paginiData IN OUT - Tugas TML (Albyalbert-1Marisa SarimiÎncă nu există evaluări
- Electrical Panel - Cheat Sheet PDFDocument1 paginăElectrical Panel - Cheat Sheet PDFbnolasco100% (1)
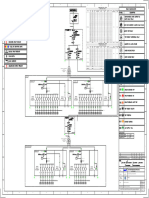
- Overall Ac SLD - SattaurDocument1 paginăOverall Ac SLD - SattaurSumit TyagiÎncă nu există evaluări
- Amplificador de Video RF General ElectricDocument23 paginiAmplificador de Video RF General ElectricLuz Marina HernándezÎncă nu există evaluări
- Optical Isolation Amplifiers Support Inverter Voltage, Current and Temperature SensingDocument6 paginiOptical Isolation Amplifiers Support Inverter Voltage, Current and Temperature SensingDiego ValdiviezoÎncă nu există evaluări
- SFG MGBDIDocument2 paginiSFG MGBDIAtiqah Farhana KhazinÎncă nu există evaluări
- Moduł Igbt Mg25j2ys40 25a 600v Toshiba DatasheetDocument4 paginiModuł Igbt Mg25j2ys40 25a 600v Toshiba Datasheetmouelhi karimÎncă nu există evaluări
- Implementation of Multilevel Inverter Based Dynamic Voltage RestorerDocument4 paginiImplementation of Multilevel Inverter Based Dynamic Voltage RestorerSiva KumarÎncă nu există evaluări
- Final Call For Chapter - UpdatedDocument1 paginăFinal Call For Chapter - UpdatedRAJANÎncă nu există evaluări
- SPWM CircuitDocument13 paginiSPWM CircuitchinnathambijÎncă nu există evaluări
- Acer Al2017 PDFDocument40 paginiAcer Al2017 PDFboroda2410Încă nu există evaluări
- Commutation Circuits PDFDocument2 paginiCommutation Circuits PDFRalphÎncă nu există evaluări
- Soft SwitchDocument187 paginiSoft SwitchJong Hee LeeÎncă nu există evaluări
- Catalogo SewDocument740 paginiCatalogo SewAlejandro Tapia100% (1)
- Weg Cfw700 Manual UsuarioDocument248 paginiWeg Cfw700 Manual UsuarioAnonymous dyT6AgjSxSÎncă nu există evaluări
- Manual SPM 200Document39 paginiManual SPM 200Francisco Javier Vera TorresÎncă nu există evaluări
- 01 - Aq - Xray18Document73 pagini01 - Aq - Xray18katabalwa eric100% (2)
- The LEITNER Drive SystemDocument7 paginiThe LEITNER Drive SystemFernandoÎncă nu există evaluări
- A3-Nxpin 02Document8 paginiA3-Nxpin 02AliRouyouÎncă nu există evaluări
- Industrial MCQsDocument16 paginiIndustrial MCQsHarith Nawfel0% (1)
- A Modified Quadratic Boost Converter Wit PDFDocument6 paginiA Modified Quadratic Boost Converter Wit PDFkadr sherpaÎncă nu există evaluări
- Akira ptv-4300Document74 paginiAkira ptv-4300Carlos FiuzaÎncă nu există evaluări
- Reed A. Off Grid Solar Power Handbook - 12 Volts Mobile Solar Power For RVS, Boats, Vans, Campers, Cabins and Tiny Homes, 2020Document161 paginiReed A. Off Grid Solar Power Handbook - 12 Volts Mobile Solar Power For RVS, Boats, Vans, Campers, Cabins and Tiny Homes, 2020VitBar50% (2)
- Fronius Energy Management Solution: With Fronius Inverter and Smart MeterDocument4 paginiFronius Energy Management Solution: With Fronius Inverter and Smart MeterjaviercjzÎncă nu există evaluări