S-ar putea să vă placă și
- Cat 15Document2 paginiCat 15Gustavo Vargas0% (1)
- Content Analysis in The Social Sciences From Manual To Automated ApproachesDocument75 paginiContent Analysis in The Social Sciences From Manual To Automated Approachesdiablero999Încă nu există evaluări
- Materi Safety Riding Honda TangerangDocument26 paginiMateri Safety Riding Honda TangerangKusuma Cheep Liiss100% (2)
- Clustering ArtDocument8 paginiClustering ArtIuliaNamaşcoÎncă nu există evaluări
- Spatial Datamining On Video LibrariesDocument8 paginiSpatial Datamining On Video LibrariesRashmi ShankarÎncă nu există evaluări
- Cvpr06 EdgeDocument8 paginiCvpr06 EdgezhangcongÎncă nu există evaluări
- Segmenting Scenes by Matching Image CompositesDocument9 paginiSegmenting Scenes by Matching Image CompositesmachinelearnerÎncă nu există evaluări
- Some Methods For Analyzing and Correcting For Spatial AutocorrelationDocument26 paginiSome Methods For Analyzing and Correcting For Spatial AutocorrelationFrancisco Parada SrepelÎncă nu există evaluări
- Nonlinear Speech Analysis Using Models For Chaotic SystemsDocument12 paginiNonlinear Speech Analysis Using Models For Chaotic SystemsTushar GuptaÎncă nu există evaluări
- Shervashidze 11 ADocument23 paginiShervashidze 11 AzumaÎncă nu există evaluări
- Algorithms and Applications For Spatial Data Mining PDFDocument32 paginiAlgorithms and Applications For Spatial Data Mining PDFrbhramarÎncă nu există evaluări
- Media Segmentation Using Selfsimilarity DecompositionDocument10 paginiMedia Segmentation Using Selfsimilarity DecompositionEdwin LeeÎncă nu există evaluări
- Signalizacija 19891988199019851980Document5 paginiSignalizacija 19891988199019851980milos89milosavljevicÎncă nu există evaluări
- Glynn 2012 CA Correspondence AnalysisDocument47 paginiGlynn 2012 CA Correspondence AnalysisHolaq Ola OlaÎncă nu există evaluări
- Heitz+Koller ECCV08Document14 paginiHeitz+Koller ECCV08Abel Augusto Ribeiro GuimarãesÎncă nu există evaluări
- Introduction To Modeling Spatial Processes Using Geostatistical AnalystDocument27 paginiIntroduction To Modeling Spatial Processes Using Geostatistical AnalystDavid Huamani UrpeÎncă nu există evaluări
- National Center For Geographic Information and Analysis: by Yuemin Ding and A. Stewart FotheringhamDocument23 paginiNational Center For Geographic Information and Analysis: by Yuemin Ding and A. Stewart FotheringhamSudharsananPRSÎncă nu există evaluări
- Report Eigenface 2012Document9 paginiReport Eigenface 2012huutinh81Încă nu există evaluări
- (2012) Regional Subgraph Discovery in Social NetworksDocument2 pagini(2012) Regional Subgraph Discovery in Social NetworksHainah Kariza LeusÎncă nu există evaluări
- Chapter Two Neuroscience: Developing Human Scene Category Distance MatrixDocument72 paginiChapter Two Neuroscience: Developing Human Scene Category Distance Matrixafrica threeÎncă nu există evaluări
- Spatio-Textual Similarity JoinDocument9 paginiSpatio-Textual Similarity JoinLewis TorresÎncă nu există evaluări
- NeurIPS 2019 Image Captioning Transforming Objects Into Words PaperDocument11 paginiNeurIPS 2019 Image Captioning Transforming Objects Into Words Paperyazhini shanmugamÎncă nu există evaluări
- Psychometrika VOL NO Pril DOI S X: 1.1. Signal Detection Theory: Our Working ExampleDocument25 paginiPsychometrika VOL NO Pril DOI S X: 1.1. Signal Detection Theory: Our Working ExampleMayuri ChatterjeeÎncă nu există evaluări
- AI-GEOSTATS - The Central Information Server For Geostatistics and Spatial STDocument13 paginiAI-GEOSTATS - The Central Information Server For Geostatistics and Spatial STCatherine MunroÎncă nu există evaluări
- 2010 Ismir GlassceilingDocument6 pagini2010 Ismir GlassceilingHani BerryÎncă nu există evaluări
- Matching Local Self-Similarities Across Images and VideosDocument8 paginiMatching Local Self-Similarities Across Images and VideosjayaramanjtÎncă nu există evaluări
- Frequency Synchronisation in OFDM: - A Bayesian AnalysisDocument5 paginiFrequency Synchronisation in OFDM: - A Bayesian AnalysisAyu KartikaÎncă nu există evaluări
- Unit5 CompressionDocument17 paginiUnit5 Compressiongiri rami reddyÎncă nu există evaluări
- 4288-Article Text-7342-1-10-20190706Document8 pagini4288-Article Text-7342-1-10-20190706CarlosÎncă nu există evaluări
- Jair 15213Document54 paginiJair 15213Chethan SrinivasÎncă nu există evaluări
- Art:10.1007/s10994 013 5332 0Document28 paginiArt:10.1007/s10994 013 5332 0aegr82Încă nu există evaluări
- Cumulative Viewshed Analysis A GIS BasedDocument17 paginiCumulative Viewshed Analysis A GIS BasedDino MarcosÎncă nu există evaluări
- Matching Local Self-Similarities Across Images and VideosDocument8 paginiMatching Local Self-Similarities Across Images and VideosabhinÎncă nu există evaluări
- An Optimized Pixel-Wise Weighting Approach For Patch-Based Image DenoisingDocument5 paginiAn Optimized Pixel-Wise Weighting Approach For Patch-Based Image DenoisingVijay KumarÎncă nu există evaluări
- Steganalysis Method For LSB Replacement Based On Local Gradient of Image HistogramDocument12 paginiSteganalysis Method For LSB Replacement Based On Local Gradient of Image HistogramFarhana Sharmin JessyÎncă nu există evaluări
- fmm-cvpr03 PDFDocument8 paginifmm-cvpr03 PDFSungkwan ParkÎncă nu există evaluări
- Principal Components Analysis: A How-To Manual For RDocument12 paginiPrincipal Components Analysis: A How-To Manual For RHamit AydınÎncă nu există evaluări
- Detecting and Sketching The Common CVPR10Document8 paginiDetecting and Sketching The Common CVPR10abhinÎncă nu există evaluări
- ANF: A Fast and Scalable Tool For Data Mining in Massive GraphsDocument10 paginiANF: A Fast and Scalable Tool For Data Mining in Massive Graphseroteme.thinks8580Încă nu există evaluări
- Efficient Similarity Search On Vector SetsDocument19 paginiEfficient Similarity Search On Vector SetsJessica WhiteÎncă nu există evaluări
- Think Globally, Fit LocallyDocument33 paginiThink Globally, Fit LocallyAli Umair KhanÎncă nu există evaluări
- PCA How To.1Document13 paginiPCA How To.1bmwliÎncă nu există evaluări
- AADgood PDFDocument12 paginiAADgood PDFKamau GabrielÎncă nu există evaluări
- Remote Sensing: Spatial-Spectral Squeeze-and-Excitation Residual Network For Hyperspectral Image ClassificationDocument16 paginiRemote Sensing: Spatial-Spectral Squeeze-and-Excitation Residual Network For Hyperspectral Image ClassificationassadÎncă nu există evaluări
- Clustering by Compression: Abstract-We Present A New Method For Clustering Based On CompressionDocument23 paginiClustering by Compression: Abstract-We Present A New Method For Clustering Based On CompressionSilvester KamriÎncă nu există evaluări
- Grafical Data Analysis MethodsDocument14 paginiGrafical Data Analysis MethodsAnonymous RHAid5sÎncă nu există evaluări
- Human Pose EstimationDocument4 paginiHuman Pose EstimationPranshu SharmaÎncă nu există evaluări
- Region Growing in GIS, An Application For Landscape Character AssessmentDocument7 paginiRegion Growing in GIS, An Application For Landscape Character Assessmentkeer_thiÎncă nu există evaluări
- Characterization TrendDetection SpatialDBs KDD 98.finalDocument7 paginiCharacterization TrendDetection SpatialDBs KDD 98.finalChris NtzÎncă nu există evaluări
- A Review On Image Quality Assessment: AbstractDocument4 paginiA Review On Image Quality Assessment: AbstractKalpak ShahaneÎncă nu există evaluări
- Chapter 15 - Blind Source Separation:: HST-582J/6.555J/16.456J Biomedical Signal and Image Processing Spring 2008Document47 paginiChapter 15 - Blind Source Separation:: HST-582J/6.555J/16.456J Biomedical Signal and Image Processing Spring 2008Srinivas SaiÎncă nu există evaluări
- Unit - 4: Define Image Compression. Explain About The Redundancies in A Digital ImageDocument24 paginiUnit - 4: Define Image Compression. Explain About The Redundancies in A Digital Imageloya suryaÎncă nu există evaluări
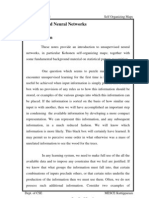
- Unsupervised Neural NetworksDocument30 paginiUnsupervised Neural Networksapi-19937584Încă nu există evaluări
- Geographical Context in Community Detection: A Comparison of A Node Based and A Link-Based ApproachDocument6 paginiGeographical Context in Community Detection: A Comparison of A Node Based and A Link-Based ApproachSebastijan SekulićÎncă nu există evaluări
- Mapping and Geographic Information Systems (GIS) : What Is GIS?Document4 paginiMapping and Geographic Information Systems (GIS) : What Is GIS?pradeep krÎncă nu există evaluări
- When Is "Nearest Neighbor" Meaningful?: Abstract. We Explore The Effect of Dimensionality On The "Nearest NeighDocument19 paginiWhen Is "Nearest Neighbor" Meaningful?: Abstract. We Explore The Effect of Dimensionality On The "Nearest NeighenriquegomezcruzÎncă nu există evaluări
- FULL CosciaM1099 PDFDocument11 paginiFULL CosciaM1099 PDFAshutosh KumarÎncă nu există evaluări
- Swilliams Project-4Document8 paginiSwilliams Project-4api-276783092Încă nu există evaluări
- Self Organizing MapsDocument29 paginiSelf Organizing MapsSimmi JoshiÎncă nu există evaluări
- Computer Stereo Vision: Exploring Depth Perception in Computer VisionDe la EverandComputer Stereo Vision: Exploring Depth Perception in Computer VisionÎncă nu există evaluări
- Document Mosaicing: Unlocking Visual Insights through Document MosaicingDe la EverandDocument Mosaicing: Unlocking Visual Insights through Document MosaicingÎncă nu există evaluări
- Scale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionDe la EverandScale Invariant Feature Transform: Unveiling the Power of Scale Invariant Feature Transform in Computer VisionÎncă nu există evaluări
- Bayesian Decision Networks: Fundamentals and ApplicationsDe la EverandBayesian Decision Networks: Fundamentals and ApplicationsÎncă nu există evaluări
- Molded Case Circuit Breakers Section 6: Spectra RMSDocument1 paginăMolded Case Circuit Breakers Section 6: Spectra RMSArslan LashariÎncă nu există evaluări
- Plunger Pump Service Manual: Installation and Start-Up InformationDocument6 paginiPlunger Pump Service Manual: Installation and Start-Up InformationDark CenobiteÎncă nu există evaluări
- Tutorial Joint Push Pull - English - V1.1 - 20 Feb 08Document31 paginiTutorial Joint Push Pull - English - V1.1 - 20 Feb 08shadownrunÎncă nu există evaluări
- SAPBW Technical Specification TemplateDocument30 paginiSAPBW Technical Specification Templatemkumar26100% (2)
- NFC Reader LibrarayDocument63 paginiNFC Reader Libraraysekhar479Încă nu există evaluări
- Guide To Apparel/Textile Care Symbols: Machine Wash CyclesDocument1 paginăGuide To Apparel/Textile Care Symbols: Machine Wash Cyclesnilhan1Încă nu există evaluări
- Taking Your Pump System Efficiency To New Heights: CU 352 Multi-Pump ControllerDocument4 paginiTaking Your Pump System Efficiency To New Heights: CU 352 Multi-Pump Controllersushant moreyÎncă nu există evaluări
- KAIFENG Quotation For 150T Cooling TowerDocument13 paginiKAIFENG Quotation For 150T Cooling TowerEslam A. FahmyÎncă nu există evaluări
- Global Deduplication Array Administration Guide: DD OS 5.0Document70 paginiGlobal Deduplication Array Administration Guide: DD OS 5.0Rajesh KumarÎncă nu există evaluări
- Detail 02 Eave Gutter With Protruding Roof Detail 01-A Ridge Detail Saddle RoofDocument1 paginăDetail 02 Eave Gutter With Protruding Roof Detail 01-A Ridge Detail Saddle Roofmin miniÎncă nu există evaluări
- Community Building PDFDocument2 paginiCommunity Building PDFLauren100% (1)
- ORF Issue Brief 309 SpaceLawDocument12 paginiORF Issue Brief 309 SpaceLawNitish KumarÎncă nu există evaluări
- NORMA TORRO Datasheet en PDFDocument11 paginiNORMA TORRO Datasheet en PDFvikaslashkariÎncă nu există evaluări
- Export EXGCE 15nov1354Document407 paginiExport EXGCE 15nov1354noName314Încă nu există evaluări
- STR Mpa-MpmDocument8 paginiSTR Mpa-MpmBANGGAÎncă nu există evaluări
- Richard Feynman BiographyDocument5 paginiRichard Feynman Biographyapi-284725456100% (1)
- LAB 1 HandoutDocument2 paginiLAB 1 HandoutManuGearÎncă nu există evaluări
- Wire CodeDocument7 paginiWire CodeAryans Kumar0% (1)
- Confined Spaces: Avoiding Common Mistakes in Gas DetectionDocument1 paginăConfined Spaces: Avoiding Common Mistakes in Gas Detectiontrravi1983Încă nu există evaluări
- Informatics and Patient SafetyDocument5 paginiInformatics and Patient SafetyCurieÎncă nu există evaluări
- Whirlpool SPIW318A2WF Air ConditionerDocument324 paginiWhirlpool SPIW318A2WF Air ConditionerAxxÎncă nu există evaluări
- BK Report and ProjectDocument55 paginiBK Report and ProjecttesfuÎncă nu există evaluări
- MSETCL - Approved Vendor ListDocument11 paginiMSETCL - Approved Vendor ListNavaneetha KrishnanÎncă nu există evaluări
- Module 8: Numerical Relaying I: Fundamentals: Fourier AlgorithmsDocument15 paginiModule 8: Numerical Relaying I: Fundamentals: Fourier Algorithmsjijo123408Încă nu există evaluări
- Tesys T Ltmr100pbdDocument3 paginiTesys T Ltmr100pbdsimbamikeÎncă nu există evaluări
- REERTRDocument4 paginiREERTRvgteeÎncă nu există evaluări
- MclogitDocument19 paginiMclogitkyotopinheiroÎncă nu există evaluări