S-ar putea să vă placă și
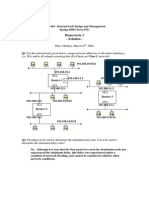
- Files Homeworks Sol HW3 Coe 444 072Document2 paginiFiles Homeworks Sol HW3 Coe 444 072Wong VoonyeeÎncă nu există evaluări
- Guide To Network Defense and CountermeasuresDocument41 paginiGuide To Network Defense and CountermeasuresJuanÎncă nu există evaluări
- Final Year Project ProposalDocument1 paginăFinal Year Project ProposalAmirul AizatÎncă nu există evaluări
- Omnet Lab01Document18 paginiOmnet Lab01Lejla HuÎncă nu există evaluări
- RFGDocument78 paginiRFGdegeÎncă nu există evaluări
- NS2Document8 paginiNS2Nipurba KonarÎncă nu există evaluări
- Ns2 ExperimentsDocument15 paginiNs2 ExperimentsThyaga Rajan100% (1)
- Ns2 Sample Coding in WirelessDocument74 paginiNs2 Sample Coding in WirelessSatish Kumar100% (1)
- Exercises 1. Simple NS2 ProgramDocument9 paginiExercises 1. Simple NS2 ProgramAlexÎncă nu există evaluări
- Network Simulator (NS-2)Document60 paginiNetwork Simulator (NS-2)devarum100% (1)
- Sample Program On NS2/NS3Document46 paginiSample Program On NS2/NS3Radhika Krishnan100% (1)
- DHCP QuestionDocument9 paginiDHCP QuestionLalit KaushikÎncă nu există evaluări
- NS3 QDocument3 paginiNS3 Qanjali_joseÎncă nu există evaluări
- Feistel AlgorithmDocument38 paginiFeistel AlgorithmpkvlaserÎncă nu există evaluări
- A Comparative Study of AODV, DSR, and DYMO Routing Protocols Using OMNeTDocument5 paginiA Comparative Study of AODV, DSR, and DYMO Routing Protocols Using OMNeTEditor IJRITCCÎncă nu există evaluări
- Experiment No:1 Three Node Point To Point Network Aim: Simulate A Three Node Point To Point Network With Duplex Links Between Them. Set Queue Size andDocument19 paginiExperiment No:1 Three Node Point To Point Network Aim: Simulate A Three Node Point To Point Network With Duplex Links Between Them. Set Queue Size andgopinath RÎncă nu există evaluări
- Computer Network Lab 1Document61 paginiComputer Network Lab 1AkshataÎncă nu există evaluări
- Bit Torrent REPORTDocument28 paginiBit Torrent REPORTmehul dholakiyaÎncă nu există evaluări
- 28 Hw5-SolDocument18 pagini28 Hw5-Solkisibongdem1412Încă nu există evaluări
- My Ns2 Tutorial Final-ColorDocument79 paginiMy Ns2 Tutorial Final-ColorvsalaiselvamÎncă nu există evaluări
- PT Simulation 1 - Intro To Cisco Packet TracerDocument6 paginiPT Simulation 1 - Intro To Cisco Packet TracerRaymond NocheteÎncă nu există evaluări
- Computer Networks MCQ QuestionsDocument8 paginiComputer Networks MCQ QuestionsRez HabloÎncă nu există evaluări
- Ccna 1Document16 paginiCcna 1aboubakrysyÎncă nu există evaluări
- JPEG and MPEG Image CompressionDocument3 paginiJPEG and MPEG Image CompressionPrem Bahadur KcÎncă nu există evaluări
- Extra Problems On Chapter 2 (HTTP and FTP)Document10 paginiExtra Problems On Chapter 2 (HTTP and FTP)Farhan Sheikh MuhammadÎncă nu există evaluări
- Chapter 10 QuizDocument10 paginiChapter 10 QuizSamuel TapusÎncă nu există evaluări
- NS by Example: Jae Chung Mark ClaypoolDocument48 paginiNS by Example: Jae Chung Mark ClaypoolLe Vinh HiepÎncă nu există evaluări
- TCP Simulation OmnetDocument26 paginiTCP Simulation OmnetSachin AlokÎncă nu există evaluări
- Mobile Ad Hoc Networks PrintoutsDocument38 paginiMobile Ad Hoc Networks PrintoutsSHADDOWWÎncă nu există evaluări
- Computer Networks ns2Document20 paginiComputer Networks ns2Himanshu SinghÎncă nu există evaluări
- 365 Ais - Database.model - file.PertemuanFileContent LOGMAT 8Document32 pagini365 Ais - Database.model - file.PertemuanFileContent LOGMAT 8Asep MiftahudinÎncă nu există evaluări
- OS Lecture3 - Inter Process CommunicationDocument43 paginiOS Lecture3 - Inter Process CommunicationFurious FiveÎncă nu există evaluări
- Traces, AWK and Xgraph: Presented By, Amritha Sampath Department of Computer Science RsetDocument44 paginiTraces, AWK and Xgraph: Presented By, Amritha Sampath Department of Computer Science Rsetanishnair94100% (1)
- IPSec AssignmentDocument6 paginiIPSec Assignmentmehdi13994Încă nu există evaluări
- Stand Alone AP Flash File System FailDocument3 paginiStand Alone AP Flash File System FailSriram BhupathirajuÎncă nu există evaluări
- 1ripv1 & V2Document3 pagini1ripv1 & V2wibby0% (1)
- Unit 2: Iot Design Methodology: Dept. of Computer Science & EngineeringDocument65 paginiUnit 2: Iot Design Methodology: Dept. of Computer Science & EngineeringxzhmcbÎncă nu există evaluări
- Process-to-Process Delivery: Udp and TCP: (Chapter 23)Document41 paginiProcess-to-Process Delivery: Udp and TCP: (Chapter 23)Giri Tharan RockÎncă nu există evaluări
- Intro To Ns2Document239 paginiIntro To Ns2Umair Ali Soomro100% (1)
- A Review of Network Traffic Analysis and Prediction TechniquesDocument22 paginiA Review of Network Traffic Analysis and Prediction TechniquesPatrick GelardÎncă nu există evaluări
- Voice Over Ip (Voip) : by Kiran Kumar Devaram Varsha Mahadevan Shashidhar RampallyDocument37 paginiVoice Over Ip (Voip) : by Kiran Kumar Devaram Varsha Mahadevan Shashidhar RampallysourabhchoudharyÎncă nu există evaluări
- Differential Pulse Code Modulation (DPCM)Document11 paginiDifferential Pulse Code Modulation (DPCM)omarhanandehÎncă nu există evaluări
- DHCP and NAT - Knowledge BaseDocument6 paginiDHCP and NAT - Knowledge BaseHasib Hamidul HaqueÎncă nu există evaluări
- CN Lab ManualDocument46 paginiCN Lab Manualsundaravanan_rm100% (1)
- Computer Network Lab Using NS2Document15 paginiComputer Network Lab Using NS2BobbyÎncă nu există evaluări
- Network Lab ManualDocument64 paginiNetwork Lab Manualget_togetherÎncă nu există evaluări
- Unit-5-Self Configuration and AutoconfigurationDocument17 paginiUnit-5-Self Configuration and AutoconfigurationSwati0% (1)
- Midterm Solution - COSC 3213 - Computer Networks 1Document13 paginiMidterm Solution - COSC 3213 - Computer Networks 1faesalhasanÎncă nu există evaluări
- Chapter 2: Application LayerDocument19 paginiChapter 2: Application LayerAmallul MustaqimÎncă nu există evaluări
- Linear Block Code Matlab PDFDocument1 paginăLinear Block Code Matlab PDFsaisreeÎncă nu există evaluări
- Transport Control Protocol: OutlineDocument18 paginiTransport Control Protocol: OutlineAnusha GarigipatiÎncă nu există evaluări
- 1.2.4.3 Lab - Researching WAN TechnologiesDocument2 pagini1.2.4.3 Lab - Researching WAN Technologieseder jahyr acuña fonsecaÎncă nu există evaluări
- Snort ProjectDocument12 paginiSnort ProjectChandana MallagundlaÎncă nu există evaluări
- 3Rzhu$Oorfdwlrqiru0Dvvlyh0,02, Psdfwri 3Rzhu$Psolilhu (IilflhqfDocument6 pagini3Rzhu$Oorfdwlrqiru0Dvvlyh0,02, Psdfwri 3Rzhu$Psolilhu (IilflhqfSofia Kara MostefaÎncă nu există evaluări
- NS-2 Lab QuestionsDocument5 paginiNS-2 Lab QuestionsUSHAÎncă nu există evaluări
- DES and Triple DESDocument31 paginiDES and Triple DESEswin Angel100% (1)
- Cross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionDe la EverandCross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionÎncă nu există evaluări
- NS2 Wired TopologyDocument11 paginiNS2 Wired TopologyPranava PranuÎncă nu există evaluări
- Ns2 WorkshopDocument65 paginiNs2 WorkshopmarysrirynÎncă nu există evaluări
- NS2 Simulation TutorialDocument14 paginiNS2 Simulation TutorialHyndu ChowdaryÎncă nu există evaluări
- PortoLivingLab An IoT-Based Sensing Platform For Smart CitiesDocument10 paginiPortoLivingLab An IoT-Based Sensing Platform For Smart CitiesNikumani ChoudhuryÎncă nu există evaluări
- Tutorial On Contiki OS, Cooja and FIT Iot-Lab: Internet of ThingsDocument31 paginiTutorial On Contiki OS, Cooja and FIT Iot-Lab: Internet of ThingsNikumani ChoudhuryÎncă nu există evaluări
- 2.2 Video PPTDocument34 pagini2.2 Video PPTNikumani ChoudhuryÎncă nu există evaluări
- Application Layer: Principles of Network ApplicationsDocument80 paginiApplication Layer: Principles of Network ApplicationsNikumani ChoudhuryÎncă nu există evaluări
- Improvement On Leach by Combining Adaptive Cluster Head Ele Ction and Two-Hop TransmissionDocument6 paginiImprovement On Leach by Combining Adaptive Cluster Head Ele Ction and Two-Hop TransmissionNikumani ChoudhuryÎncă nu există evaluări
- IEEE TechSym 2016 - Abstract ProceedingsDocument58 paginiIEEE TechSym 2016 - Abstract ProceedingsNikumani ChoudhuryÎncă nu există evaluări
- AdditionalDocument9 paginiAdditionalNikumani ChoudhuryÎncă nu există evaluări
- Tie BarsDocument18 paginiTie BarsKutty Mansoor100% (1)
- Amaravathi 16 PointsdDocument16 paginiAmaravathi 16 PointsdSakhamuri Ram'sÎncă nu există evaluări
- Brochure 2017Document44 paginiBrochure 2017bibiana8593Încă nu există evaluări
- Ryerson BroucherDocument36 paginiRyerson BroucherHarsh GosaliaÎncă nu există evaluări
- Final Spare Price List For TataDocument58 paginiFinal Spare Price List For TataNaveen SahaÎncă nu există evaluări
- Catalogue Price List - Adisa - EN PDFDocument78 paginiCatalogue Price List - Adisa - EN PDFVlad BalanÎncă nu există evaluări
- De Thi HSG Tinh Binh PhuocDocument9 paginiDe Thi HSG Tinh Binh PhuocDat Do TienÎncă nu există evaluări
- DEEPWEB, Dark Web, TOR NETWORK, Bitcoin, Encryption, Codes and CiphersDocument10 paginiDEEPWEB, Dark Web, TOR NETWORK, Bitcoin, Encryption, Codes and CiphersEugene KowalzkiÎncă nu există evaluări
- Compressor Oil SDocument2 paginiCompressor Oil SQuy CocanhÎncă nu există evaluări
- Panasonic KX-FLB853 Service ManualDocument371 paginiPanasonic KX-FLB853 Service ManualAndrey Khodanitski100% (1)
- Process Control & Tuning of Industrial Control LoopsDocument2 paginiProcess Control & Tuning of Industrial Control LoopsHasen BebbaÎncă nu există evaluări
- This Study Resource Was: ReferencesDocument2 paginiThis Study Resource Was: ReferencesKristiana Mikhail FlorendoÎncă nu există evaluări
- How To Calculate Duty and Surface Area of Heat Ex ChangersDocument7 paginiHow To Calculate Duty and Surface Area of Heat Ex ChangersJohn Obidi100% (2)
- AWS Advanced Networking - Specialty Sample Exam QuestionsDocument4 paginiAWS Advanced Networking - Specialty Sample Exam Questionsraghs4uÎncă nu există evaluări
- Documents: IT4203: IT Project ManagementDocument8 paginiDocuments: IT4203: IT Project ManagementsathyatrueÎncă nu există evaluări
- SC Chapter 15 - FiltersDocument35 paginiSC Chapter 15 - Filterslornfate100% (1)
- Nestle New Product Development Feb 06Document16 paginiNestle New Product Development Feb 06Raghav SagarÎncă nu există evaluări
- Six Sigma Black Belt Case StudyDocument37 paginiSix Sigma Black Belt Case StudyHimang Jain0% (1)
- The Roman Frontier at The Lower Danube 4th-6th CenturiesDocument21 paginiThe Roman Frontier at The Lower Danube 4th-6th Centuriesmikawa442100% (1)
- Selection and Design of An Axial Flow FanDocument4 paginiSelection and Design of An Axial Flow Fanfateton42Încă nu există evaluări
- Installation Guide: KS1000 XD Longspan X-Dek® Roof Panel Multiple Panels Eaves To RidgeDocument1 paginăInstallation Guide: KS1000 XD Longspan X-Dek® Roof Panel Multiple Panels Eaves To RidgeGlavanRafaelÎncă nu există evaluări
- KingSpan Double Span Tiled RoofsDocument5 paginiKingSpan Double Span Tiled RoofsSuraj De SilvaÎncă nu există evaluări
- Internship Report On Performance Appraisal of JAN AssociatesDocument43 paginiInternship Report On Performance Appraisal of JAN AssociatesNoushin Islam OmiÎncă nu există evaluări
- EX. NO Date Program NO SignDocument80 paginiEX. NO Date Program NO SignDheepaÎncă nu există evaluări
- Criminology Students Atittude Towards The Use of Instructional MaterialsDocument7 paginiCriminology Students Atittude Towards The Use of Instructional MaterialsGlobal Research and Development Services0% (1)
- Redmi Note 3 Special Edition KATE" Unofficial Bootloader Unlock TWRP Install Install Xiaomi - Eu Multilanguage ROMDocument4 paginiRedmi Note 3 Special Edition KATE" Unofficial Bootloader Unlock TWRP Install Install Xiaomi - Eu Multilanguage ROMalangz91Încă nu există evaluări
- Concrete Slab in Two Levels - Design - Modeling - Structural Engineering General Discussion - Eng-Tips PDFDocument6 paginiConcrete Slab in Two Levels - Design - Modeling - Structural Engineering General Discussion - Eng-Tips PDFMahindaÎncă nu există evaluări
- Monitoring OverviewDocument77 paginiMonitoring Overviewmbal@diballi.nlÎncă nu există evaluări
- Microsoft Announces First Windows CE Shared Source Program To Allow Commercial Distribution of Modified Source Code - StoriesDocument11 paginiMicrosoft Announces First Windows CE Shared Source Program To Allow Commercial Distribution of Modified Source Code - StoriesMariusz PruszowskiÎncă nu există evaluări
- Sap-Srm Ref ManualDocument593 paginiSap-Srm Ref Manualdebdutta.sarangi6279100% (4)