S-ar putea să vă placă și
- Ethernet IP Texas InstrumentsDocument6 paginiEthernet IP Texas InstrumentsFranzKafkaÎncă nu există evaluări
- Control Intelligence Improves Renewable Energy EfficiencyDocument7 paginiControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngÎncă nu există evaluări
- Uhc AwatersDocument60 paginiUhc Awaterskammu9713Încă nu există evaluări
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocument44 paginiEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaÎncă nu există evaluări
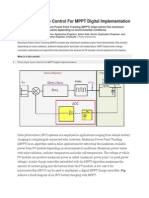
- Direct Duty Cycle Control For MPPT Digital ImplementationDocument5 paginiDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngÎncă nu există evaluări
- All About HarmonicsDocument240 paginiAll About HarmonicsKhushal KharadeÎncă nu există evaluări
- Calculation of Short-Circuit CurrentsDocument35 paginiCalculation of Short-Circuit CurrentsdaodoquangÎncă nu există evaluări
- 309 An 09 Solar Panel PowerDocument3 pagini309 An 09 Solar Panel PowerJoel Medina GuttiÎncă nu există evaluări
- AN296110 Current Sensing For Renewable EnergyDocument4 paginiAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngÎncă nu există evaluări
- Tutorial Digital Control Loop DesignDocument17 paginiTutorial Digital Control Loop DesignPhạm Văn TưởngÎncă nu există evaluări
- C Programming For Embedded System Applications PDFDocument54 paginiC Programming For Embedded System Applications PDFWendo David PesaÎncă nu există evaluări
- Evaluation and DSP Based Implementation of PWM Approaches For SinDocument90 paginiEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngÎncă nu există evaluări
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDocument10 paginiDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngÎncă nu există evaluări
- The Adventures of Huckleberry Finn by Mark TwainDocument289 paginiThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- An Improved PV Battery Charger For Low Cost Low PowerDocument4 paginiAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngÎncă nu există evaluări
- A Novel Dynamic Var CompensatorDocument4 paginiA Novel Dynamic Var CompensatorPhạm Văn TưởngÎncă nu există evaluări
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDocument7 paginiIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngÎncă nu există evaluări
- Slaa 075Document19 paginiSlaa 075Manidhar ParvatamÎncă nu există evaluări
- Current-Transformer Phase-Shift Compensation and CalibrationDocument7 paginiCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjÎncă nu există evaluări
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDocument6 pagini1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanÎncă nu există evaluări
- Informatics in Control Automation and RoboticsDocument5 paginiInformatics in Control Automation and RoboticsPhạm Văn TưởngÎncă nu există evaluări
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 paginiUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngÎncă nu există evaluări
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocument9 pagini(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngÎncă nu există evaluări
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDocument6 paginiInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngÎncă nu există evaluări
- NHSPE ReadingDocument5 paginiNHSPE ReadingMohamed HanafiÎncă nu există evaluări
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDocument8 paginiStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- TW Exams Ielts How To Prepare Ielts TipsDocument2 paginiTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryÎncă nu există evaluări
- Phan Tich 1 Bai Task 2 by Ngoc BachDocument4 paginiPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- Space Vector Modulation An IntroductionDocument10 paginiSpace Vector Modulation An IntroductionJohan LinderÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Lord Kuthumi - Dolphins SpeakDocument8 paginiLord Kuthumi - Dolphins SpeakEmeraldRay0% (1)
- Evolution of MISDocument4 paginiEvolution of MISHarshitha PadmashaliÎncă nu există evaluări
- Introduction On Photogrammetry Paul R WolfDocument33 paginiIntroduction On Photogrammetry Paul R Wolfadnan yusufÎncă nu există evaluări
- Description Features: PT6964 LED Driver ICDocument15 paginiDescription Features: PT6964 LED Driver ICDhivya NÎncă nu există evaluări
- Full Download Test Bank For Financial Reporting Financial Statement Analysis and Valuation 8th Edition PDF Full ChapterDocument36 paginiFull Download Test Bank For Financial Reporting Financial Statement Analysis and Valuation 8th Edition PDF Full Chaptervespersrealizeravzo100% (17)
- Tubular Flow ReactorDocument24 paginiTubular Flow ReactorluismiguelmmercadoÎncă nu există evaluări
- Concrete Tunnel Design and Calculation Spreadsheet Based On AASHTO and ACIDocument3 paginiConcrete Tunnel Design and Calculation Spreadsheet Based On AASHTO and ACIFirat PulatÎncă nu există evaluări
- Patel, Anita - Super Indian Snack and Street Food Recipes PDFDocument117 paginiPatel, Anita - Super Indian Snack and Street Food Recipes PDFBella ImèneÎncă nu există evaluări
- Pengaruh Volume Pemberian Air Terhadap Pertumbuhan Bibit Kelapa Sawit Di Pembibitan UtamaDocument11 paginiPengaruh Volume Pemberian Air Terhadap Pertumbuhan Bibit Kelapa Sawit Di Pembibitan UtamaTahum MatfuahÎncă nu există evaluări
- Marshall Abby - Chess Cafe - The Openings Explained - 1-63, 2015-OCR, 682pDocument682 paginiMarshall Abby - Chess Cafe - The Openings Explained - 1-63, 2015-OCR, 682pArtur MałkowskiÎncă nu există evaluări
- 2020 Sustainabilty Report - ENDocument29 pagini2020 Sustainabilty Report - ENGeraldÎncă nu există evaluări
- SMAW Health Hazards of g12 Students During Laboratory ActivitiesDocument25 paginiSMAW Health Hazards of g12 Students During Laboratory ActivitiesPaul Patrick Guanzon100% (1)
- Airborne Doppler Radar Navigation of Jet Transport Aircraft-EftDocument10 paginiAirborne Doppler Radar Navigation of Jet Transport Aircraft-Eftjulio perezÎncă nu există evaluări
- Rajesh CVDocument3 paginiRajesh CVS R PramodÎncă nu există evaluări
- The Determinants of Service Quality and Customer Satisfaction in Malaysian e Hailing ServicesDocument8 paginiThe Determinants of Service Quality and Customer Satisfaction in Malaysian e Hailing ServicesYoannisa AtinaÎncă nu există evaluări
- Experiments: Mouthpiece, Which Is A Short Tube of Length About Equal To The Radius of The Orifice That Projects Into TheDocument4 paginiExperiments: Mouthpiece, Which Is A Short Tube of Length About Equal To The Radius of The Orifice That Projects Into Thefrancis dimakilingÎncă nu există evaluări
- Ok TC FlotationDocument4 paginiOk TC FlotationWilliam SalcedoÎncă nu există evaluări
- Technical Datasheet: ENGUARD™ BP 75 ARF Multi Purpose Bonding Paste With FibresDocument2 paginiTechnical Datasheet: ENGUARD™ BP 75 ARF Multi Purpose Bonding Paste With FibresFernando Cesar PérezÎncă nu există evaluări
- SOAL UAS Kelas 12Document8 paginiSOAL UAS Kelas 12amirÎncă nu există evaluări
- 4g Frequency BandsDocument5 pagini4g Frequency BandsaorukoÎncă nu există evaluări
- Serial Interface RS485 (RS422) Configuration InstructionsDocument20 paginiSerial Interface RS485 (RS422) Configuration Instructionsyana sopian hidayatÎncă nu există evaluări
- Sandvik DD210Document4 paginiSandvik DD210Lener Elvin Lopez LavadoÎncă nu există evaluări
- Documentation ExamplesDocument5 paginiDocumentation ExamplesErika HarveryÎncă nu există evaluări
- Booster Mock Test For NEETDocument15 paginiBooster Mock Test For NEETDrÎncă nu există evaluări
- Traina 250Wp PDFDocument2 paginiTraina 250Wp PDFSherifImamÎncă nu există evaluări
- Spining Mill in IndiaDocument74 paginiSpining Mill in IndiaMahendra Shah100% (4)
- Stephane Moses The Angel of History Rosenzweig Benjamin Scholem PDFDocument196 paginiStephane Moses The Angel of History Rosenzweig Benjamin Scholem PDFlivehuman100% (3)
- Fuhs - Towards An Integral EpistemologyDocument39 paginiFuhs - Towards An Integral EpistemologyjmcmichaelÎncă nu există evaluări
- Renault Gearbox and Final Drive OilsDocument10 paginiRenault Gearbox and Final Drive OilsPhat0% (1)
- Pakistan RailwayDocument38 paginiPakistan RailwayمحمودعليÎncă nu există evaluări