S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Daily SunnahDocument234 paginiDaily SunnahJafar SadiqÎncă nu există evaluări
- Synchronous Buck Converter LAB-2: Power Electronics (ECEN405)Document5 paginiSynchronous Buck Converter LAB-2: Power Electronics (ECEN405)Jafar SadiqÎncă nu există evaluări
- OR SS3 20190805 - OffersDocument3 paginiOR SS3 20190805 - OffersJafar SadiqÎncă nu există evaluări
- SOP - Essay GuidelinesDocument2 paginiSOP - Essay GuidelinesJafar SadiqÎncă nu există evaluări
- Risk 1: Inherent Schedule Flaws: The Top Five Software Project RisksDocument4 paginiRisk 1: Inherent Schedule Flaws: The Top Five Software Project RisksJafar Sadiq100% (1)
- Campus To Corporate - Issue 3 - Batch 2Document16 paginiCampus To Corporate - Issue 3 - Batch 2Jafar SadiqÎncă nu există evaluări
- NI-North Island Site DataDocument60 paginiNI-North Island Site DataJafar SadiqÎncă nu există evaluări
- Design a PWM Wave Generator and Vary the Duty CycleDocument7 paginiDesign a PWM Wave Generator and Vary the Duty CycleJafar SadiqÎncă nu există evaluări
- Abcde Fghiÿ Bfihf: FFQRRST Z (Q/) ) Z (Q/) )Document3 paginiAbcde Fghiÿ Bfihf: FFQRRST Z (Q/) ) Z (Q/) )Jafar SadiqÎncă nu există evaluări
- Assignment-1: Power System AnalysisDocument6 paginiAssignment-1: Power System AnalysisJafar SadiqÎncă nu există evaluări
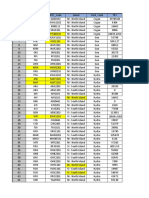
- SI NZ Power Station DataDocument490 paginiSI NZ Power Station DataJafar SadiqÎncă nu există evaluări
- SI NZ Power Station DataDocument490 paginiSI NZ Power Station DataJafar SadiqÎncă nu există evaluări
- Campus To Corporate - Issue 2 Batch 2 PDFDocument6 paginiCampus To Corporate - Issue 2 Batch 2 PDFJafar SadiqÎncă nu există evaluări
- Feerule GudgaonDocument55 paginiFeerule GudgaonJafar SadiqÎncă nu există evaluări
- AP Transco Sub Engineer Question Paper SET-ADocument16 paginiAP Transco Sub Engineer Question Paper SET-AVanitha Pillai KÎncă nu există evaluări
- Campus To Corporate - Issue 1 Batch 2Document5 paginiCampus To Corporate - Issue 1 Batch 2Jafar SadiqÎncă nu există evaluări
- Bowling Skills 2011 PDFDocument27 paginiBowling Skills 2011 PDFJafar SadiqÎncă nu există evaluări
- Campus To Corporate - Issue 2 Batch 2 PDFDocument6 paginiCampus To Corporate - Issue 2 Batch 2 PDFJafar SadiqÎncă nu există evaluări
- Direct Recording: B.Vineeth. B130942EEDocument5 paginiDirect Recording: B.Vineeth. B130942EEJafar SadiqÎncă nu există evaluări
- Abstract PDFDocument1 paginăAbstract PDFJafar SadiqÎncă nu există evaluări
- Welcome: Lets Gear Up For An Amazing Project !!!!!!Document13 paginiWelcome: Lets Gear Up For An Amazing Project !!!!!!Jafar SadiqÎncă nu există evaluări
- OperationalDocument4 paginiOperationalJafar SadiqÎncă nu există evaluări
- Lesson7 SteamPowerPlantDocument33 paginiLesson7 SteamPowerPlantJafar SadiqÎncă nu există evaluări
- Department of Electronics and CommunicationDocument1 paginăDepartment of Electronics and CommunicationJafar SadiqÎncă nu există evaluări
- Cocubes Exambrochure PDFDocument4 paginiCocubes Exambrochure PDFJafar SadiqÎncă nu există evaluări
- Speed Control of DC Motor Using DTMFDocument1 paginăSpeed Control of DC Motor Using DTMFJafar SadiqÎncă nu există evaluări
- 15 Jun 1996 Male GEN No: Communication Address GATE Exam DetailsDocument1 pagină15 Jun 1996 Male GEN No: Communication Address GATE Exam DetailsJafar SadiqÎncă nu există evaluări
- Repor Mid Semt PDFDocument34 paginiRepor Mid Semt PDFJafar SadiqÎncă nu există evaluări
- Business Analyst Interview Questions and Answers PDFDocument5 paginiBusiness Analyst Interview Questions and Answers PDFPraveen GY75% (4)
- Section I - Switchgear & Substation ApparatusDocument194 paginiSection I - Switchgear & Substation Apparatushardeep08Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Robot Arm Tutorial GuideDocument16 paginiRobot Arm Tutorial Guidejulfo05100% (1)
- Motion Planning For Smooth Pickup of Moving ObjectsDocument8 paginiMotion Planning For Smooth Pickup of Moving ObjectsVatsalÎncă nu există evaluări
- Model-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceDocument14 paginiModel-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceIAES International Journal of Robotics and AutomationÎncă nu există evaluări
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 paginiMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalÎncă nu există evaluări
- SlamDocument11 paginiSlamulisesÎncă nu există evaluări
- Mobile Robot Navigation and Obstacle AvoidanceDocument13 paginiMobile Robot Navigation and Obstacle AvoidanceSummer TriangleÎncă nu există evaluări
- C4B - Mobile Robotics: Paul Michael NewmanDocument18 paginiC4B - Mobile Robotics: Paul Michael NewmanMaría De Los Ángeles Pérez GómezÎncă nu există evaluări
- Low-Altitude Navigation For Multi-Rotor Drones in Urban AreasDocument16 paginiLow-Altitude Navigation For Multi-Rotor Drones in Urban AreasAdeeba AliÎncă nu există evaluări
- Full body obstacle collision avoidance methodDocument11 paginiFull body obstacle collision avoidance methodArsh UppalÎncă nu există evaluări
- Versatile Robot Simulation FrameworkDocument6 paginiVersatile Robot Simulation FrameworkRODNEY KEVIN CHACHA PASTASÎncă nu există evaluări
- Thesis BibiliographyDocument6 paginiThesis BibiliographySozharajan BÎncă nu există evaluări
- Robot Arm TutorialDocument16 paginiRobot Arm TutorialFarshad yazdi100% (4)
- Mscthesis AmirAlJawahiri 4225074Document86 paginiMscthesis AmirAlJawahiri 4225074Veerabhadrayya KatapurmathÎncă nu există evaluări
- A ROSPlan-based Multi-Robot Navigation SystemDocument6 paginiA ROSPlan-based Multi-Robot Navigation SystemDannilo MirandaÎncă nu există evaluări
- Snake Robots Full ReportDocument13 paginiSnake Robots Full ReportTreesa ArchnanaÎncă nu există evaluări
- A Behavioral Planning Framework For Autonomous DrivingDocument7 paginiA Behavioral Planning Framework For Autonomous DrivingAnand PrakashÎncă nu există evaluări
- Iacopo Gentilini's Tangent Bug Path Planning AlgorithmDocument4 paginiIacopo Gentilini's Tangent Bug Path Planning AlgorithmervauluÎncă nu există evaluări
- Dynamic resource reservation prevents collisions and deadlocks for multiple AGVsDocument12 paginiDynamic resource reservation prevents collisions and deadlocks for multiple AGVsIchiware StoreÎncă nu există evaluări
- Sanjeev Sharma CVDocument2 paginiSanjeev Sharma CVGabriel Reid100% (1)
- Mrinal Kalakrishnan: CHOMP Motion PlannerDocument15 paginiMrinal Kalakrishnan: CHOMP Motion PlannerWillow GarageÎncă nu există evaluări
- Simulation of AGVs in MATLABDocument67 paginiSimulation of AGVs in MATLABChâuTrungTínÎncă nu există evaluări
- Navigational Strategies of Mobile Robots: A Review: Dayal R. ParhiDocument21 paginiNavigational Strategies of Mobile Robots: A Review: Dayal R. ParhiSMITH CAMILO QUEVEDOÎncă nu există evaluări
- A Survey On Vision Based UAV NavigationDocument13 paginiA Survey On Vision Based UAV NavigationchandrakanthatsÎncă nu există evaluări
- Line-of-Sight Guidance For Path Following of Marine VehiclesDocument29 paginiLine-of-Sight Guidance For Path Following of Marine Vehiclesartist-bossÎncă nu există evaluări
- Research About RoboticsDocument3 paginiResearch About RoboticsAhmed MalikÎncă nu există evaluări
- Udacity - Flying NDDocument6 paginiUdacity - Flying NDRishi BhalodiaÎncă nu există evaluări
- Bachelor Thesis: Coverage and Partitioning Techniques of A Multi-Obstacle EnvironmentDocument76 paginiBachelor Thesis: Coverage and Partitioning Techniques of A Multi-Obstacle Environmentdco123Încă nu există evaluări
- Portfolio: Jaineel Ashok Desai M.S. in Mechanical Engineering, USCDocument32 paginiPortfolio: Jaineel Ashok Desai M.S. in Mechanical Engineering, USCJaineel DesaiÎncă nu există evaluări
- Path Planning and Trajectory Planning Algorithms: A General OverviewDocument33 paginiPath Planning and Trajectory Planning Algorithms: A General OverviewKEEP CALM studiosÎncă nu există evaluări