S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Master Antenna Television System and Satellite SystemDocument6 paginiMaster Antenna Television System and Satellite SystemMHEP_DANIELÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- SAX Brochure - Web ReadyDocument4 paginiSAX Brochure - Web ReadyEng-Ahmad Abo-AledousÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Bends - Route SelectionDocument6 paginiBends - Route SelectionanishsrÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Calibration of The Calorimeter and HessDocument7 paginiCalibration of The Calorimeter and HessazirÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Msi ms-7222 Rev 3.0 SCH PDFDocument30 paginiMsi ms-7222 Rev 3.0 SCH PDFRodney RibeiroÎncă nu există evaluări
- Sensores AvDocument12 paginiSensores Avhb CorpÎncă nu există evaluări
- BX-74 / BX-78: Sliding Gate Operator BX SeriesDocument24 paginiBX-74 / BX-78: Sliding Gate Operator BX SeriesStefce PetrovÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Watertight Doors On Ships: Types, Maintenance & SOLAS RegulationsDocument16 paginiWatertight Doors On Ships: Types, Maintenance & SOLAS Regulationsgeorgesaguna100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- 4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignDocument10 pagini4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignSamawat AhsanÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Manual Técnico Sony HDC-DX70Document72 paginiManual Técnico Sony HDC-DX70Cristian MoraisÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- FM200Document23 paginiFM200Ahmed SherifÎncă nu există evaluări
- Assignment 1Document4 paginiAssignment 1MikeyÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Precision r5500 Service Manual en UsDocument104 paginiPrecision r5500 Service Manual en UsJonDyson32Încă nu există evaluări
- X2 / 275 Vac: B 81 191 EMI Suppression CapacitorsDocument4 paginiX2 / 275 Vac: B 81 191 EMI Suppression CapacitorsMeg YorkÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Alliance Technical Catalog Sept 2019 - LR Final - 1571832848Document208 paginiAlliance Technical Catalog Sept 2019 - LR Final - 1571832848Александр ФедоровÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Know It BrochureDocument8 paginiKnow It BrochureSonali SinhaÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- 006R5-WMS-JI-MI-MAU-ACS-II-23 Working Method - Pile CapDocument20 pagini006R5-WMS-JI-MI-MAU-ACS-II-23 Working Method - Pile CapEko Budi HartantoÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- 1st Indian Near Surface Geophysics BrochureDocument4 pagini1st Indian Near Surface Geophysics BrochureAdarsh TanejaÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Gsk980Tda Turning Machine CNC System: CharacteristicsDocument10 paginiGsk980Tda Turning Machine CNC System: CharacteristicsPramod YadavÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- CSC 263Document108 paginiCSC 263osecaloÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
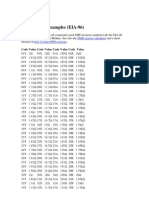
- SMD Resistor ExamplesDocument5 paginiSMD Resistor Examplesmarcbuss100% (1)
- EOT CRANE - Rev 2Document6 paginiEOT CRANE - Rev 2Koushik BhaumikÎncă nu există evaluări
- Jaybird Bluebuds X ManualDocument1 paginăJaybird Bluebuds X Manualeduardi7720Încă nu există evaluări
- Bsee201 B - Fluid MechanicsDocument150 paginiBsee201 B - Fluid MechanicsMarvin GagarinÎncă nu există evaluări
- Investigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProDocument4 paginiInvestigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProEditor IJTSRDÎncă nu există evaluări
- Procedure For Field Joint CoatingDocument10 paginiProcedure For Field Joint CoatingM Waqas HabibÎncă nu există evaluări
- Uponor Dop Klett CPR 20 Ic 251 V 001Document3 paginiUponor Dop Klett CPR 20 Ic 251 V 001jamppajoo2Încă nu există evaluări
- Thermophysical Properties of Containerless Liquid Iron Up To 2500 KDocument10 paginiThermophysical Properties of Containerless Liquid Iron Up To 2500 KJose Velasquez TeranÎncă nu există evaluări
- Lube-Tech: Lubricants For Wind TurbinesDocument6 paginiLube-Tech: Lubricants For Wind TurbinesMC AÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Advanced Techniques in Power System Protective Relaying PDFDocument332 paginiAdvanced Techniques in Power System Protective Relaying PDFshashikant yadavÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)