S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- CSE 455/555 Spring 2012 Homework 1: Bayes ∗ ωDocument3 paginiCSE 455/555 Spring 2012 Homework 1: Bayes ∗ ωAlireza ZahraÎncă nu există evaluări
- Homework 2Document3 paginiHomework 2Alireza ZahraÎncă nu există evaluări
- Nonparametric Methods: Jason CorsoDocument49 paginiNonparametric Methods: Jason CorsoAlireza ZahraÎncă nu există evaluări
- CSE 455/555 Spring 2013 Quiz 7 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Solutions by Yingbo ZhouDocument1 paginăCSE 455/555 Spring 2013 Quiz 7 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Solutions by Yingbo ZhouAlireza ZahraÎncă nu există evaluări
- Curriculum PDFDocument7 paginiCurriculum PDFAlireza ZahraÎncă nu există evaluări
- Lecture20 MetaDocument133 paginiLecture20 MetaAlireza ZahraÎncă nu există evaluări
- CSE 455/555 Spring 2013 Quiz 13 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY BuffaloDocument1 paginăCSE 455/555 Spring 2013 Quiz 13 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY BuffaloAlireza ZahraÎncă nu există evaluări
- CSE 455/555 Spring 2013 Homework On Discriminants and SVMDocument2 paginiCSE 455/555 Spring 2013 Homework On Discriminants and SVMAlireza ZahraÎncă nu există evaluări
- CSE 455/555 Spring 2013 Quiz 9 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Solutions by Yingbo ZhouDocument1 paginăCSE 455/555 Spring 2013 Quiz 9 of 14 Jason J. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Solutions by Yingbo ZhouAlireza ZahraÎncă nu există evaluări
- Homework NonprmDocument2 paginiHomework NonprmAlireza ZahraÎncă nu există evaluări
- Homework Decision SolutionsDocument3 paginiHomework Decision SolutionsAlireza ZahraÎncă nu există evaluări
- Homework Nonprm SolutionDocument2 paginiHomework Nonprm SolutionAlireza ZahraÎncă nu există evaluări
- Solutions: CSE 455/555 Spring 2013 Quiz 2 of 14 Prof. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Prepared by David JohnsonDocument1 paginăSolutions: CSE 455/555 Spring 2013 Quiz 2 of 14 Prof. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Prepared by David JohnsonAlireza ZahraÎncă nu există evaluări
- Solutions: CSE 455/555 Spring 2013 Quiz 1 of 14 Prof. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Prepared by David JohnsonDocument1 paginăSolutions: CSE 455/555 Spring 2013 Quiz 1 of 14 Prof. Corso, Jcorso@buffalo - Edu, SUNY Buffalo Prepared by David JohnsonAlireza ZahraÎncă nu există evaluări
- Level Ii Formula Sheet - UltrasonicsDocument1 paginăLevel Ii Formula Sheet - UltrasonicsAlireza ZahraÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 4011b PDFDocument46 pagini4011b PDFlungu mihaiÎncă nu există evaluări
- Strengthening of Reinforced Concrete Beams Using FRP Technique: A ReviewDocument16 paginiStrengthening of Reinforced Concrete Beams Using FRP Technique: A ReviewHÙNG Trần MạnhÎncă nu există evaluări
- Steam Turbine Description HP Turbine Casing Supports and GuidesDocument2 paginiSteam Turbine Description HP Turbine Casing Supports and GuidesAmit MukherjeeÎncă nu există evaluări
- Cavallini 2013Document14 paginiCavallini 2013Satheesh Kumar SÎncă nu există evaluări
- DPR TemplateDocument5 paginiDPR TemplateSantoshkumar GurmeÎncă nu există evaluări
- Advanced Solid Mechanics - Problem 2Document2 paginiAdvanced Solid Mechanics - Problem 2Sandesh TripathiÎncă nu există evaluări
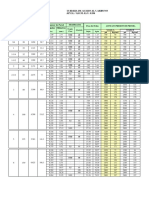
- Tablas Medidas Tubos de Acero API5L - ASTM A53 - A106Document6 paginiTablas Medidas Tubos de Acero API5L - ASTM A53 - A106Reinaldo AndaraÎncă nu există evaluări
- Case Study 4Document2 paginiCase Study 4Bá Phong LêÎncă nu există evaluări
- 10 Technologies/Methods For Controlling Nox & Sox Emissions From ShipsDocument2 pagini10 Technologies/Methods For Controlling Nox & Sox Emissions From ShipsRaji MNÎncă nu există evaluări
- Manufacturing Processes Ch.4 (10 and 11) CastingDocument143 paginiManufacturing Processes Ch.4 (10 and 11) Castingashoku24007Încă nu există evaluări
- Cuptor Coven - 6emd UslDocument22 paginiCuptor Coven - 6emd UslPaul MocanuÎncă nu există evaluări
- EN 288-3xDocument38 paginiEN 288-3xSyah Reza Maulana0% (1)
- Dr.M.uthayakumar - Google Scholar CitationsDocument13 paginiDr.M.uthayakumar - Google Scholar CitationsrkÎncă nu există evaluări
- Propeller Shaft: Models FA and FBDocument15 paginiPropeller Shaft: Models FA and FBKomatsu Perkins HitachiÎncă nu există evaluări
- Keckley Float ValvesDocument15 paginiKeckley Float ValvesWagner LimaÎncă nu există evaluări
- "JD" Series Pulling Tool: 4Jdc Operation ManualDocument4 pagini"JD" Series Pulling Tool: 4Jdc Operation Manualsong Li100% (1)
- Instruction Manual ControltromikDocument10 paginiInstruction Manual ControltromikVoştinar IoanÎncă nu există evaluări
- Assignment-1 (2020011108)Document28 paginiAssignment-1 (2020011108)Atul KumarÎncă nu există evaluări
- Valves: Oscar Mauricio Cala Camacho - 2152815 Iván Darío Nova Uribe - 2142795 Facilidades de Superficie Grupo H1 2020-1Document34 paginiValves: Oscar Mauricio Cala Camacho - 2152815 Iván Darío Nova Uribe - 2142795 Facilidades de Superficie Grupo H1 2020-1Oscar CalaÎncă nu există evaluări
- AXI90104 Manual enDocument40 paginiAXI90104 Manual enChristian EscandonÎncă nu există evaluări
- CE142P 2 Lab Report 1 Soberano PDFDocument14 paginiCE142P 2 Lab Report 1 Soberano PDFqwert qwertyÎncă nu există evaluări
- Ultrasonic Plastic Welding HornDocument5 paginiUltrasonic Plastic Welding HornAnonymous MVHeP5zÎncă nu există evaluări
- Strength of Materials 4th Edition by Pytel and Singer CompressDocument10 paginiStrength of Materials 4th Edition by Pytel and Singer CompressJohn Carlo EdejerÎncă nu există evaluări
- Sistema Separado BSSCE96 CB Manual SC BGH Serie BDocument104 paginiSistema Separado BSSCE96 CB Manual SC BGH Serie BAriel EbbekeÎncă nu există evaluări
- Formation Pres TempDocument1 paginăFormation Pres TempMahmoud Ahmed Ali Abdelrazik0% (1)
- Simpson Fence Base and BracketDocument3 paginiSimpson Fence Base and BracketAloÎncă nu există evaluări
- 02 110 BPS Foam Pump Skid With Foam Pump and RC ControllerDocument8 pagini02 110 BPS Foam Pump Skid With Foam Pump and RC Controllerarachman297988Încă nu există evaluări
- HydrantDocument18 paginiHydrantNhat CaoÎncă nu există evaluări
- PROBLEM 17.137: SolutionDocument7 paginiPROBLEM 17.137: SolutiontaÎncă nu există evaluări
- Numerical Cave Propagation SimulationsDocument14 paginiNumerical Cave Propagation SimulationswalterloliÎncă nu există evaluări