S-ar putea să vă placă și
- Ib 2013 PDFDocument0 paginiIb 2013 PDFAnonymous p0bBEKÎncă nu există evaluări
- PPQ For Mid 1Document9 paginiPPQ For Mid 1sreenivasroyal8Încă nu există evaluări
- Electrical Circuits & FieldsDocument90 paginiElectrical Circuits & FieldsDeep AgarwalÎncă nu există evaluări
- Marketing BookDocument71 paginiMarketing Booksreenivasroyal8Încă nu există evaluări
- Tricks To Remember Currencies of Some CountriesDocument3 paginiTricks To Remember Currencies of Some Countriessreenivasroyal8Încă nu există evaluări
- Switch Gear and ProtectionDocument4 paginiSwitch Gear and Protectionsreenivasroyal8Încă nu există evaluări
- Recent Development in Electric Power Transmission TechnologyDocument37 paginiRecent Development in Electric Power Transmission TechnologyFehmi KhirullaÎncă nu există evaluări
- Energy Auditing Demand Side ManagementDocument4 paginiEnergy Auditing Demand Side Managementkartheek427Încă nu există evaluări
- A Smart Card Based Prepaid Electricity SystemDocument4 paginiA Smart Card Based Prepaid Electricity Systemsreenivasroyal8Încă nu există evaluări
- Eee-III-Analog Electronic Ckts (10es32) - NotesDocument128 paginiEee-III-Analog Electronic Ckts (10es32) - NotesDilip TheLipÎncă nu există evaluări
- Notes Electrical HeatingDocument10 paginiNotes Electrical Heatingsreenivasroyal8Încă nu există evaluări
- Powerline CommunicationDocument9 paginiPowerline CommunicationVivek PandeyÎncă nu există evaluări
- Modern Control TheoryDocument1 paginăModern Control Theorysreenivasroyal8Încă nu există evaluări
- 1 2 IstDocument3 pagini1 2 IstdeepeshmathurÎncă nu există evaluări
- EE1992Document13 paginiEE1992sreenivasroyal8Încă nu există evaluări
- Andhra Pradesh EconomyDocument95 paginiAndhra Pradesh Economyvishwanath100% (4)
- Ibps Po English PaperDocument11 paginiIbps Po English PaperAnkit JainÎncă nu există evaluări
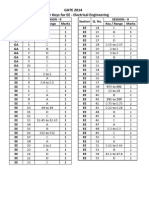
- GATE 2014 Answer Keys For EE Electrical EngineeringDocument1 paginăGATE 2014 Answer Keys For EE Electrical Engineeringsreenivasroyal8Încă nu există evaluări
- Ibps PoDocument29 paginiIbps PoBrian AllenÎncă nu există evaluări
- HVDC and HVAC Line IonDocument9 paginiHVDC and HVAC Line IonChaitanya ShakyaÎncă nu există evaluări
- Electrical Engineering Full Paper 2005Document25 paginiElectrical Engineering Full Paper 2005Sarath Kumar KmrÎncă nu există evaluări
- Energy Auditing Demand Side ManagementDocument4 paginiEnergy Auditing Demand Side Managementkartheek427Încă nu există evaluări
- EE1996Document19 paginiEE1996kmbkrisÎncă nu există evaluări
- Comparative Evaluation of HVDC and HVAC Transmission SystemsDocument5 paginiComparative Evaluation of HVDC and HVAC Transmission SystemsJithin SreenivasanÎncă nu există evaluări
- Solar Powered LedDocument42 paginiSolar Powered Ledscribd_____Încă nu există evaluări
- Pic Based Intelligent Tracking System Using Solar PowerDocument3 paginiPic Based Intelligent Tracking System Using Solar Powersreenivasroyal8Încă nu există evaluări
- Five Level Flying CapacitorDocument7 paginiFive Level Flying Capacitorsreenivasroyal8Încă nu există evaluări
- Comparative Evaluation of HVDC and HVAC Transmission SystemsDocument5 paginiComparative Evaluation of HVDC and HVAC Transmission SystemsZak TahirkheliÎncă nu există evaluări
- 1Document43 pagini1Adithya ChandrasekaranÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Agma MachineDocument6 paginiAgma Machinemurali036Încă nu există evaluări
- Scrum Exam SampleDocument8 paginiScrum Exam SampleUdhayaÎncă nu există evaluări
- ME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Document85 paginiME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Nathar ShaÎncă nu există evaluări
- ChatGPT & EducationDocument47 paginiChatGPT & EducationAn Lê Trường86% (7)
- How Transformers WorkDocument15 paginiHow Transformers Worktim schroderÎncă nu există evaluări
- ABS Service Data SheetDocument32 paginiABS Service Data SheetMansur TruckingÎncă nu există evaluări
- PDS DeltaV SimulateDocument9 paginiPDS DeltaV SimulateJesus JuarezÎncă nu există evaluări
- Audi A4-7Document532 paginiAudi A4-7Anonymous QRVqOsa5Încă nu există evaluări
- The Bio-Based Economy in The NetherlandsDocument12 paginiThe Bio-Based Economy in The NetherlandsIrving Toloache FloresÎncă nu există evaluări
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Document96 paginiCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRAÎncă nu există evaluări
- Topic: Grammatical Issues: What Are Parts of Speech?Document122 paginiTopic: Grammatical Issues: What Are Parts of Speech?AK AKASHÎncă nu există evaluări
- .CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADODocument782 pagini.CLP Delta - DVP-ES2 - EX2 - SS2 - SA2 - SX2 - SE&TP-Program - O - EN - 20130222 EDITADOMarcelo JesusÎncă nu există evaluări
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Document2 paginiSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhÎncă nu există evaluări
- Hyundai SL760Document203 paginiHyundai SL760Anonymous yjK3peI7100% (3)
- Approvals Management Responsibilities and Setups in AME.B PDFDocument20 paginiApprovals Management Responsibilities and Setups in AME.B PDFAli LoganÎncă nu există evaluări
- Maximum and Minimum PDFDocument3 paginiMaximum and Minimum PDFChai Usajai UsajaiÎncă nu există evaluări
- Cash Flow July 2021Document25 paginiCash Flow July 2021pratima jadhavÎncă nu există evaluări
- Homework 9Document1 paginăHomework 9Nat Dabuét0% (1)
- Object Oriented ParadigmDocument2 paginiObject Oriented ParadigmDickson JohnÎncă nu există evaluări
- 1188 2665 1 SMDocument12 pagini1188 2665 1 SMRita BangunÎncă nu există evaluări
- Tomb of Archimedes (Sources)Document3 paginiTomb of Archimedes (Sources)Petro VourisÎncă nu există evaluări
- Jurnal Job DescriptionDocument13 paginiJurnal Job DescriptionAji Mulia PrasÎncă nu există evaluări
- LG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFDocument95 paginiLG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFplasmapete71% (7)
- Wine TourismDocument9 paginiWine Tourismyarashovanilufar1999Încă nu există evaluări
- Management Accounting by Cabrera Solution Manual 2011 PDFDocument3 paginiManagement Accounting by Cabrera Solution Manual 2011 PDFClaudette Clemente100% (1)
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 paginiDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonÎncă nu există evaluări
- MLX90614Document44 paginiMLX90614ehsan1985Încă nu există evaluări
- Sabian Aspect OrbsDocument8 paginiSabian Aspect Orbsellaella13100% (2)
- Amity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorDocument23 paginiAmity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorMayank TayalÎncă nu există evaluări
- Bone Surface MarkingsDocument2 paginiBone Surface MarkingsNurul Afiqah Fattin AmatÎncă nu există evaluări