Documente Academic
Documente Profesional
Documente Cultură
Projets
Încărcat de
Dimitri KaboreDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Projets
Încărcat de
Dimitri KaboreDrepturi de autor:
Formate disponibile
Comptition UAV 2013
Document daccompagnement
01/01/2013
Universit du Qubec Chicoutimi
Sylvain R.-Rivard, 2012
Pascal Fortin, 2012
Rvision : Martin J.-D. Otis, 2012
Comptition UAV 2013
Document daccompagnement Page 2
TABLE DES MATIRES
PRSENTATION DE LA CONCEPTION 4
PROBLMATIQUE 4
LES COMPOSANTES DU DRONE 5
LES CAPTEURS 6
LA TLMTRIE 7
LORDINATEUR DE BORD 7
LE FUSELAGE 7
LES COMPOSANTES DE LA STATION DE COMMANDE TERRESTRE (GCS) 8
CONCEPTION INFORMATIQUE 9
STATION DE COMMANDE TERRESTRE (GROUND CONTROL STATION) 9
VISION ROBOTIQUE EMBARQUE 10
CONCEPTION LECTRIQUE 10
MODLISATION ARODYNAMIQUE 11
ORDINATEUR DE BORD ET ASSERVISSEMENT 11
INTGRATION MATRIEL ET DEGR DAUTONOMIE 13
CONCEPTION MCANIQUE 13
ANALYSE DES RISQUES SUR LA SCURIT 14
CONTRIBUTIONS ET BNFICES DU NOUVEL APPAREIL 14
GESTION DE PROJET 15
EXERCICES 17
EXERCICES DE RVISION SUR MATLAB 17
EXERCICES POUR LASSERVISSEMENT DE LARONEF 19
EXERCICE 1 : LE ROULIS (ROLL) 19
EXERCICE 2 : LE TANGAGE (PITCH) ET LACCLRATION 21
EXERCICE 3 LE TANGAGE (PITCH) DANS LESPACE DTATS 22
Comptition UAV 2013
Document daccompagnement Page 3
LISTE DES FIGURES
FIGURE 1 SYSTME COMPLET D'UN DRONE SEMI-AUTONOME 4
FIGURE 2 COMPOSANTES LECTRONIQUES L'INTRIEUR DU DRONE 6
FIGURE 3 COMPOSANTES DE LA STATION DE COMMANDE TERRESTRE FAVORISANT LES PRISES DE DCISION OPRATIONNELLE 8
FIGURE 4 SYSTME DE VISUALISATION ET DE COMMANDE PAR VISION NUMRIQUE 9
FIGURE 5 ASSERVISSEMENT DE TROIS DEGRS DE LIBERTS DU DRONE 12
FIGURE 6 DIAGRAMME DE GANTT REPRSENTANT LA GLOBALIT DU PROJET 16
FIGURE 7: ATTITUDE D'UN AVION 19
FIGURE 8 : LA COMMANDE DU ROULIS 19
FIGURE 9: CONTRLE DE ROUTE (HEADING CONTROL) 20
FIGURE 10: REPRSENTATION DE L'ASSERVISSEMENT D'UN AVION 21
FIGURE 11 : MODLISATION DANS L'ESPACE DES TATS 22
LISTE DES TABLEAUX
TABLEAU 1: LISTE DES FRQUENCES DE RADIO UTILISE 7
TABLEAU 2: PROPRIT PHYSIQUE DU FUSELAGE DE LARONEF 7
Comptition UAV 2013
Document daccompagnement Page 4
Prsentation de la conception
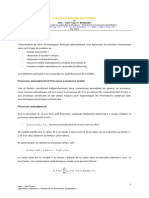
Le projet consiste concevoir un FCS (Flight Control System) pour un drone semi-autonome qui
sera en mesure de reprer des cibles au sol, dont des feux de fort. Le FCS contient : (1) un
autopilote nomm GNC (guidage, navigation et commande), (2) une station de commande
terrestre (GCS pour Ground Control Station), (3) linstrumentation embarque ddie la
ralisation dune mission et (4) un systme datterrissage et de dcollage autonome (ALG pour
Autonomous Landing Guidance System). Le systme complet est dcrit sur la figure 1. Une
attention particulire porte sur la scurit de la mission tout en conservant un cot de
fabrication minimum et une performance leve.
Cost
Superviser UAV Operator
Ground Control Station
M
i
s
s
i
o
n
G
o
a
l
Visual rendering
Haptic rendering
Performance
Interactive
and visual
commands.
RC commands
Semi-autonomous
controller
Operational decision
Human-Computer Interaction
Safety
GNC and ALG
Figure 1 Systme complet d'un drone semi-autonome
Le document prsente en premier lieu la problmatique de la comptition tudiante. Par la
suite les projets de conception sont prsents dans chaque domaine de concentration, soit le
gnie informatique, lectrique et mcanique. La principale tche de conception en gnie
informatique est la ralisation de la station terrestre de commande (GCS). Dun autre ct, la
conception en lectrique est davantage orient vers la modlisation et lasservissement du
drone. Finalement, la conception mcanique consiste llaboration du fuselage de mme que
lanalyse de la stabilit.
Problmatique
Vous serez dans un contexte de comptition (qui se tiendra laroport dAlma en 2013) o la
problmatique consistera raliser une mission de surveillance:
- http://www.cedalma.com/competition-2013/
- http://www.unmannedsystems.ca/content.php?doc=123
Comptition UAV 2013
Document daccompagnement Page 5
Le projet se divise en plusieurs tapes de conception dont un encadrement sera assur par un
technicien et un professeur ingnieur. Les tapes de conception du FCS sont :
(1) partir des quations non-linaires, vous aurez rendre linaire les quations dont les
variables seront commands lors d'un vol autonome, en particulier les trois rotations de
l'aronef. Un modle espace d'tat pourra tre tablit partir des quations linarises.
(2) Vous aurez tudier et analyser la stabilit du modle de mme que la dynamique de
vol.
(3) Vous aurez concevoir un asservissement sur chacun des tats en fonction des
spcifications de performance.
(4) Par la suite, vous aurez concevoir lacquisition des donnes dont les entres sont des
signaux provenant de diffrents capteurs qui dterminera la trajectoire et le
comportement de l'aronef.
(5) Vous aurez dfinir une demande SFOC :
http://www.tc.gc.ca/media/documents/ca-opssvs/623-001_1.pdf
(6) Vous aurez tablir une procdure automatique de dcollage, de navigation et
d'atterrissage.
(7) Vous aurez dfinir les mthodes qui permettront de raliser la mission.
(8) Finalement, vous aurez concevoir les modifications ncessaire dans la station terrestre
afin datteindre les objectifs de la mission.
Selon la documentation de la comptition et lobjectif de lquipe en place, lobjectif est
datteindre le niveau dautonomie V2 (vol prprogramm avec une identification supervise des
objectifs visuels). Lors de la mission, le niveau dautonomie souhait est de M3. Laltitude en vol
devrait tre environ de 1000 pieds. Les objectifs visuels dcoder pourrait tre des codes QR ou
des ballons de couleurs pouvant reprsenter ou identifier un feu de fort.
Les composantes du drone
Le drone doit contenir plusieurs modules responsables de son autonomie comme le montre la
figure 2. On doit y retrouver, entre autres : des capteurs, un systme dacquisition pour mesurer
les capteurs, un ordinateur de bord pour lautopilote, un ordinateur ddi la vision numrique
et la commande de lorientation de la camra, un systme de tlmtrie et un systme de
propulsion et un systme de gestion de lalimentation en plus dun fuselage stable en mesure de
contenir ces systmes.
Comptition UAV 2013
Document daccompagnement Page 6
Figure 2 Composantes lectroniques l'intrieur du drone
Les capteurs
Deux classes de capteurs sont embarques dans le drone. La premire classe de capteurs
permet de mesurer lattitude du drone et est utilis par le GNC (guidage, navigation et
commande). Lattitude du drone est compose de quatre degrs de liberts. Ces capteurs
permettent de corriger la trajectoire du drone lors de perturbations dues au vent
(acclromtre, gyroscope et magntomtre) et pour poursuivre la trajectoire dsire (GPS,
magntomtre et altimtre ou capteur de pression). Le IMU est une centrale inertielle qui
comprend les trois acclromtres, les trois gyroscopes et des magntomtres qui permettent
dextraire les angles dEuler.
La deuxime classe de capteurs est utilise lors de la mission (comme une camra CCD). Ces
capteurs peuvent aussi tre utiliss lors de la commande de la trajectoire (par exemple en
utilisant le flux optique pour des manuvres dvitement dobstacle, datterrissage ou de
dcollage), mais sont prioritairement utiliss afin daccomplir la mission. La vitesse du drone
peut-tre mesure par un tube de Pitot ou en utilisant les donnes provenant du GPS.
Plusieurs autres capteurs peuvent tre installs sur un drone dont les capteurs de proximit
ultrasonique utilis dans les manuvres dvitement. Dans le cadre de la comptition, ce type
de capteurs ne sera pas ncessaire.
FPV VideoAntenna
Telemetry Antenna
E
D
F
F
a
n
L
i
P
o
B
a
t
.
Vision
GPS
CCD
Flight
Computer
FPV
Pressure
sensor
S
e
r
v
o
Payload
CCD
Camera
FPV Transmitter 500mW
XBee
GPS
Gumstix Oveo
Telemetry
XbeePro RX/TX
Sparkfun IMU Autopilot UDB4 DX6i visual
control
4000mAh main LiPoly
850mAh TX/RX LiPoly
Safety Parachute
Comptition UAV 2013
Document daccompagnement Page 7
La tlmtrie
Trois systmes de tlmtrie sont ncessaires dans le systme actuel. Un seul systme serait
rellement ncessaire, soit celui de la transmission et de la rception de lensemble des
commandes et des mesures. Pour russir utiliser quun seul systme de tlmtrie, il serait
ncessaire de concevoir un systme de transmission de la vido et des donnes mesures. De la
mme manire, il serait ncessaire de programmer la tlcommande lintrieur de la station
de commande terrestre (GCS pour Ground Control Station). Dans ce cas, dans lventualit o le
logiciel de la station de commande terrestre aurait une erreur dexcution, il ne serait plus
possible de commander le drone partir du sol. Pour cette raison, il serait prfrable, pour
augmenter la scurit, de dupliquer les systmes de tlmtrie. Le tableau 1 montre les trois
systmes de tlmtrie et leurs frquences respectives.
Tableau 1: Liste des frquences de radio utilise
Module Frquence
Tlmtrie (X-Bee Pro) 900 MHz
Transmission vido FPV 2.4 GHz
Tlcommande Spectrum R/C 2.4 GHz
Source : Donnes provenant du manufacturier
Lordinateur de bord
Lordinateur de bord est constitu de deux composantes principales : le processeur pour
lasservissement de lattitude du drone et le processeur responsable du traitement de la vision
numrique. Lordinateur de bord est responsable de lacquisition des donnes des capteurs, de
les traiter numriquement (avec laide dun filtre par exemple) et dexcuter une loi de
commande. Il est aussi envisageable quun module de planification de trajectoires soit mis en
uvre directement dans le processeur.
Le fuselage
Le modle rduit de lavion utilise dans le cadre de ce projet possde une configuration
arodynamique similaire lavion BD-5. Les caractristiques physiques du fuselage sont
prsentes au tableau 2. La vitesse de pointe peut atteindre plus de 200 km/h. Cependant, afin
de remplir la mission dans un temps de vol de 30 minutes, la puissance des moteurs sera rduite
30 % de sa capacit. La puissance maximale sera uniquement applique au dcolage.
Tableau 2: Proprit physique du fuselage de laronef
Proprit Mesure
Winspan 1200 mm
Longueur 1100 mm
Masse total en vol (max.) 3 Kg
Aire des ailes 21.7 dm
2
Charge maximale 138.2 g/ dm
2
Propulsion 90mm EDF
Comptition UAV 2013
Document daccompagnement Page 8
Vitesse pointe 200 km/h
Vitesse de dcrochage
Source : Donnes provenant du manufacturier
Les composantes de la station de commande terrestre (GCS)
La station de commande terrestre est essentiellement compose dun systme de tlguidage
vue, dun systme de commande des oprations de la mission et dun systme de visualisation
des images capturs par la camra embarque comme le montre la figure 3. En premier lieu, le
systme de commande des oprations de la mission permet de donner le comportement
gnral du drone. Il permet donc dtablir une interaction humain-machine (Humain-Computer
Interaction ou HCI) de haut niveau. Il doit, entres autres, de :
1. dfinir les oprations avant le vol (comme des points de route);
2. rcuprer les donnes mesures par les capteurs pendant un vol en temps rel et en
temps diffr et
3. commander lattitude (dont les paramtres des boucles dasservissement des degrs de
libert) et la trajectoire du drone distance (dfinir de nouveaux points de route).
Le systme de tlguidage vue utilise une tlcommande Spectrum DX6i. Ce systme est
ncessaire afin dassurer la scurit. En effet, il pourra prendre la relve dans le cas o
lordinateur de bord ou le logiciel de la station de commande gnre une erreur permanente
lors de lexcution.
Figure 3 Composantes de la station de commande terrestre favorisant les prises de dcision oprationnelle
OpenPilot Interface
Flat Panel
Antenna
Radio
Controller
Telemetry
XbeePro
RX/TX
FPV
Video
Receiver
Monitor
Human Conputer-Interface
Comptition UAV 2013
Document daccompagnement Page 9
Conception informatique
Afin dassurer une meilleure scurit lors de la mission, certains systmes doivent tre doubls.
Par exemple, la vision numrique peut tre ralise par lordinateur de bord et peut tre vrifi
par la station de commande terrestre. Ce ddoublement a cependant un cot et un choix devra
tre ralis. Cette section prsente certains choix de la conception de la station de commande
terrestre et de la vision numrique embarque telle que dcrite dans la figure 4.
Figure 4 Systme de visualisation et de commande par vision numrique
Station de commande terrestre (Ground Control Station)
Le travail de conception des tudiants inscris en gnie informatique pourra davantage tre
orient sur la conception des logiciels de poursuite de trajectoire temps-rel dans lordinateur
de bord et des logiciels de visualisation des donnes acquises par laronef et transmisses une
station terrestre. Vous allez coder la plateforme temps-rel UDB4 pour communiquer avec une
station de commande au sol de OpenPilot et FlightGear (ou X-Plane):
1. http://www.openpilot.org/product/openpilot-gcs/
2. http://code.google.com/p/gentlenav/
3. http://www.flightgear.org/ ou
4. http://www.x-plane.com/
Vous aurez modifier le logiciel OpenPilot afin de ladapter au module lectronique choisit.
Vous avez aussi lopportunit de comparer dautres GCS et deffectuer un choix final. Lobjectif
sera de visualiser les objectifs et de les identifier sur une carte telle que celle fournie par Google
Map. Plus prcisment, la position du GPS dans le drone est transmise au GCS qui la traite et
laffiche en consquence. Aussi, dans une deuxime fentre, le flux vido de la camra
TX
Video
RX
Video
UAV
GroundControl Station
CCD
Camera
Target
identification
/following
2DOF Gimbal
Servo motors
Vision-Computer
On Module
Flight
Computer
Trajectory
planning
TX
Telemetry
RX
Telemetry
Humanoperator
Target
identification
/following
Visualisation
module
Aircraft
trajectory and
waypoints
Human
supervisor
ack.
Comptition UAV 2013
Document daccompagnement Page 10
embarque doit tre affich. Dailleurs, des systmes de transmission sans fil des images sont
disponibles dont le LongRange et de DIYDrone :
1. http://www.rangevideo.com/
2. http://store.diydrones.com/5_8Ghz_500mW_Wireless_Video_Transmitter_Receiver_p/
wi-ts352.htm
Une fois cette image transmise et affiche, il sera pertinent de la traiter en temps rel utilisant
une vision robotique embarque.
Vision robotique embarque
Par exemple, des codes QR pourraient tre au sol dont lordinateur de bord ou le GCS devra en
identifier le contenu. Dans le domaine de la vision numrique, afin didentifier des formes au
sol, OpenCV est habituellement utilis. Dailleurs, plusieurs logiciels de reconnaissance open
source existent. Un exemple de logiciel qui pourrait tre mis en uvre est le Zbar :
1. http://zbar.sourceforge.net/about.html
Des systmes de vision bass sur des camras CMOS sont disponibles sur le march dont le
CMUCAM4, le HaViMo et le FALCON (sur FPGA). Ces trois systmes ont t conu de manire
raliser le suivit de lignes au sol et le suivit de couleurs. Dans le cas de la reconnaissance de
forme (feux de fort) et de la lecture de code QR (ou tout autre type de target visuel), des
systmes supportant OpenCV sont plus appropri. Dans ce cas, il est possible dutiliser des
plateformes Android comme le ODROID-X ou DSP comme le Gumstix avec une camra Caspa FS.
Gumstix Overo (Water) est trs populaire en robotique et semble tre un choix intressant avec
son processeur OMAP3730 de 800MHz dont la camra Caspa FS est sensible au spectre visible et
infrarouge; ce qui est particulirement intressant pour la dtection des feux de fort. Dans le
cas de lutilisation dun Gumstix, il serait possible dutiliser une librairie reconnue en vision
numrique et particulirement en robotique, soit la YARP :
2. http://eris.liralab.it/yarp/
Embarqu sur un Gumstix, ce logiciel identifie et classifie des formes, des couleurs et des target
visuels.
Conception lectrique
Dun ct, la ralisation dun systme semi-autonome est ncessaire afin de rduire la
complexit des algorithmes embarqus. Cette rduction de complexit amliore la scurit du
systme mais diminue son autonomie. Lautonomie est rduite autant au niveau de la prise de
dcision autonome, quau niveau de sa consommation lectrique. En effet, la supervision dun
tel systme ncessite lajout de modules supplmentaires dont une tlmtrie pour la
transmission des commandes et une tlmtrie pour la transmission des images vido qui
consomme davantage de courant quun ordinateur de traitement. Le degr dautonomie du
Comptition UAV 2013
Document daccompagnement Page 11
UAV doit donc tre dfinit de manire respecter des contraintes de cot, de poids, de
consommation et maximiser la russite de la mission.
Dun autre ct, un systme semi-autonome contient un ordinateur de bord qui permet
dasservir lattitude du systme. Dans le cas du systme ltude, quatre degrs de libert
doivent tre commands : les trois rotations (le tangage, le lacet et le roulis) et le dplacement
avant (vitesse de dplacement par rapport au sol). Afin de raliser lasservissement embarqu, il
est ncessaire, dans un premier temps de raliser la modlisation arodynamique et dans un
deuxime temps de concevoir les quatre compensateurs programms dans un ordinateur de
bord.
Modlisation arodynamique
Afin de dterminer des compensateurs pour raliser la conception de lasservissement, il est
ncessaire de dterminer les modles arodynamiques des trois degrs de libert en rotation (le
tangage (), le lacet () et le roulis() ). De manire gnrale, pour trois boucles
dasservissement utilisant une loi de commande classique linaire (PID+Filtre ou avance-retard
de phase) sur un aronef en modle rduit, les trois quations peuvent tre dcrites par :
|
.
|
\
|
+ +
I
=
|
.
|
\
|
+
=
|
.
|
\
|
+ + =
r n n nr
x
a l l
xz
z x
z
e m m m
y
r
a p
e q
C C
V
b
C
Sb V J
C
V
b
C Sb V
J J J
J
C C
V
c
C
J
c S V
o
o | |
o u u
u
o
o
o o
|
2 4
2 ) ( 4
2
2
2
2
2
De plus, le modle gnral dun servomoteur est dcrit par :
1 +
= = =
s
K
cr
r
ca
a
ce
e
t o
o
o
o
o
o
Avec ces quatre quations, il est possible de concevoir les trois compensateurs (PID ou avance-
retard de phase). Le fuselage dun drone de type BD-5 est disponible afin dtudier ses
paramtres arodynamique des quations prcdentes avec les logiciels XFOIL et JAVAFOIL.
Ordinateur de bord et asservissement
Le travail de conception des tudiants inscris en gnie lectrique sera davantage orient sur
lasservissement des tats de laronef, de la dfinition de la mission, de la recharge des
batteries et de llectronique embarque. Vous aurez concevoir linstrumentation ddie la
ralisation de la mission de mme que lintgration matrielle de lensemble de llectronique
embarqu (ordinateur de bord). Par exemple, vous serez amen tudier la vision numrique
en mesure didentifier, entres autres, des codes QR qui contiennent des waypoints, des
variations de tempratures (feux au sol, bris dune ligne lectrique, etc.).
Comptition UAV 2013
Document daccompagnement Page 12
Plusieurs ordinateurs de bord existent sur le march dont certains sont OpenSource. Entre
autres, on retrouve le Paparazzi, le ArduPilot et le UDB4 qui sont tous essentiellement
quivalent en termes de fonctionnalit et de cot. Bien que le ArduPilot semble beaucoup plus
complet, le choix repose sur un critre plus important. En effet, puisque lUQAC supporte les
technologies de Microchip (cours magistraux, laboratoires, techniciens dj forms), la slection
de lordinateur de bord est directement associe ce support technologique.
Lordinateur de bord choisit est donc le UDB4 (http://code.google.com/p/gentlenav/) qui
contient un dsPIC de Microchip. Vous aurez donc intgrer diffrents modules lectroniques et
informatiques qui permettent lacquisition et le traitement des donnes afin de remplir la
mission.
Dans le support informatique retrouv lUQAC, MatLAB, Simulink (avec le Embedded Coder) et
MPLAB C30 sont les principaux outils de conception disponible. Vous pourrez aussi utiliser des
logiciels OpenSource dont un simulateur de vol (HIL pour Hardware-in-the-loop), un autopilote
(MatrixPilot) et une station de commande au sol (OpenPilot).
Le module dasservissement doit commander les trois orientations du drone de mme que la
vitesse de dplacement. La figure 5 montre un schma gnral de lasservissement. Afin de
dmontrer la fonctionnalit, une figure en forme de 8 (ou infini) doit tre ralise de manire
autonome par le drone.
Figure 5 Asservissement de trois degrs de liberts du drone
Elevators
(
e
)
Actuators
Rudder
(
r
)
Ailerons
(
a
)
Flight Computer (dsPIC)
Kalman
Filter
Trajectory
planning
Electronics (sensors and computer)
Numeric
vision
Lateral
Dynamics
Control
Axial
Dynamics
Control
6DOF
IMU
Longitudinal
Dynamics
Control
LLA to
[X,Y]
GPS
RX/TX
RC
Comptition UAV 2013
Document daccompagnement Page 13
Intgration matriel et degr dautonomie
Vous aurez concevoir le degr dautonomie du drone. Les interfaces matrielles qui relient
lensemble des capteurs, de la tlmtrie, de la vision robotique de manire rendre autonome
le drone seront conu et fabriqu dans le cadre de ce projet. Vous devez slectionner tous les
capteurs (altimtre, tube de pitot, GPS, etc.) et les intgrer au UDB4. Entre autres, un module de
tlmtrie est dj disponible sur la tlcommande. Un systme embarqu devra slectionner
le signal du capteur et le transmettre la station terrestre, en passant par la tlcommande. Les
donnes recueillit devront tre transmises la station terrestre en utilisant des modules longues
portes tel que le X-Bee Pro, mais prfrablement celle de la tlcommande qui est dj
disponible. Vous serez amen dfinir lensemble des trajectoires du drone de manire
rendre autonome le dcollage, la navigation lors de la mission, latterrissage et latterrissage
durgence (batterie faible, bris mcanique, etc.). Finalement, vous aurez analyser et prsenter
les risques sur la scurit de la ralisation de la mission. La gestion de lalimentation, soit de la
puissance restante des batteries, est un facteur traiter.
Conception mcanique
La section de conception mcanique du fuselage du drone est base sur un appareil BD-5
propuls laide dune turbine lectrique. Le fuselage est modifi par rapport lappareil
dorigine afin de facilit la propulsion avec une turbine.
La propulsion dun drone peut tre ralise en utilisant une turbine air (moteur lectrique sans
brosse) dont la force de pousse peut-tre oriente dans deux degrs de libert. Ce type de
systme est nomm TVC (Trust Vector Control). Il est dailleurs utilis pour les jets en mesure de
se stabilit sur place. La gomtrie de la tuyre de mme que des ailerons permettent de diriger
le vecteur de pouss. Le TVC est aussi utilis pour la propulsion de lanceur (fuse) pour la mise
en orbite de satellite.
Vous aurez concevoir la gomtrie du TVC en adaptant la tuyre dun drone. Cette tuyre
devra orienter le vecteur de pouss dans deux degrs de libert. Il sera donc ncessaire de
raliser lasservissement de la tuyre de mme quun fuselage adapt. Dans les tapes de
conception, vous aurez : (1) analyser diffrents mcanismes qui permettent dorienter le
vecteur de pouss, (2) choisir la meilleure configuration pour un drone semi-autonome, (3)
concevoir le mcanisme dorientation, (4) dterminer le modle pour raliser lasservissement,
(5) concevoir llectronique de bord et (6) concevoir lasservissement du mcanisme afin de
commander lattitude (ou le comportement) du drone dans la poursuite dune trajectoire, en
particulier celles du dcollage et de latterrissage.
Les outils de conception sont MatLAB et Simulink pour la partie asservissement. Vous aurez
aussi raliser une modlisation sous SolidWork pour le mcanisme de la tuyre et ladaptation
du fuselage du drone.
Comptition UAV 2013
Document daccompagnement Page 14
Analyse des risques sur la scurit
Lanalyse des risques est une priorit lors de la mise en uvre dun systme dont un degr
dautonomie est octroy un systme. Plutt que dopter pour un systme entirement
autonome, le projet consiste dvelopper un systme dont les dcisions oprationnelles sont
effectues par un tre humain. Ce type de systme semi-autonome favorise une rduction de la
complexit de llectronique embarque tout en rduisant aussi la complexit des algorithmes.
Afin de dmontrer la capacit des concepteurs du drone raliser un systme scuritaire,
lquipe a ralis deux demandes SFOC dont une pour la comptition et une autre pour
effectuer des essaies en vol.
Cette section liste un ensemble dlments qui ont t mis en uvre afin damliorer la scurit
lors des essais et lors de la comptition. La station terrestre est compos de trois systmes
visuels afin deffectuer les dcisions oprationnelles finales : la visualisation des images de la
camra, la visualisation des donnes provenant des capteurs et la commande RC directe par un
pilote.
En premier lieu, il est possible en tout temps de configurer un mode de vol tlguid avec la
tlcommande DX6i. Dailleurs, les problmes de capteurs dont la vision numrique constitue le
risque le plus lev lors dun vol autonome. La vision a donc la priorit la plus faible dans la
ralisation de la mission et ce systme est supervis au sol par la station terrestre.
En deuxime lieu, lors de la perte du signal pendant plus de 10 secondes, le drone est
immdiatement en mode de fin de mission pour effectuer un retour au point de dpart (home).
Dans lventualit o la perte du signal est sur une priode plus leve (1 minutes), le systme
de rcupration par parachute est activ. Bien que deux systmes (sur deux canaux) de radio
tlcommande amliorerait la scurit, un seul systme est utilis. Cependant, trois systmes
de tlmtrie indpendants sont mis en uvre afin de suivre adquatement la mission la
station terrestre.
Finalement, si le drone quitte la zone de la mission et se retrouve dans la section tampon du
terrain, un systme de rcupration avec parachute est activ pour terminer immdiatement la
mission. Ce systme de rcupration est aussi utilis manuellement lors dune panne majeure
lorsquil nest pas possible de rcuprer le drone laide dune tlcommande.
Le UAV semi-autonome prvu est donc compatible avec tous les aspects de la scurit.
Dailleurs, lautopilote peut tre tout moment dsactiv de mme que le systme de
rcupration par parachute.
Contributions et bnfices du nouvel appareil
Lappareil propos possde un degr dautonomie trs lev. Il possde une vision numrique
utilis en robotique qui assure la ralisation de la mission de manire autonome. Une
supervision minimale est requise lors de la mission, mais ncessaire dans le cas dune situation
Comptition UAV 2013
Document daccompagnement Page 15
durgence o risque comme une rflexion lumineuse qui empche la vision de fonctionner
correctement. Lappareil est dot dun systme de gestion de lalimentation et de gestion des
risques, dont la priorit est plus leve que la ralisation de la mission, qui commande
lordinateur de vol. Un calcul de risque permet de finaliser prmaturment la mission et
effectuer un atterrissage durgence laide dun parachute. Le calcul du risque est bas sur la
mesure des dviations des capteurs et la position du drone dans lespace arien.
Gestion de projet
Lquipe est divise en quatre groupes de travail : [WP1] conception de lasservissement et
intgration des capteurs, [WP2] conception de la station de commande terrestre et des
mthodes de visualisation, [WP3] conception de la charge utile pour la ralisation de la mission
et [WP4] conception des systmes amliorant la scurit du drone. Ces quatre groupes
travaillent en parallle tout au long du projet et sont responsables de lintgration de leur
module dans le drone. Lquipe utilise donc une technique de gestion simultane de projet.
Chaque groupe est responsable de lanalyse des risques sur la ralisation du projet, de la gestion
des diffrents lments de conception et des tapes jalons tablir. Chaque groupe est
responsable de lanalyse des risques quantitatifs et qualitatifs de mme que ltablissement
dune stratgie dorganisation de la ractivit.
Un premier diagramme de Gantt est fourni la figure 6 afin de dmontrer la gestion globale du
projet utilisant une gestion simultane. Le projet total est estim 1900 heures de travail dont
les quatre groupes de travail ont chacun une banque denviron 600 heures qui sont partags
entre les collgues. Ceci reprsente 135 heures de travail par tudiant. De manire quilibrer
le travail des membres, chaque groupe a un gestionnaire qui soccupe, en plus de sa partie de
conception, de latteinte des objectifs et de latteinte des jalons tout au long du projet. Les
tudiants comptabilisent leurs heures travailles avec des feuilles de temps de manire
respecter la banque dheures dans un groupe. Cette stratgie favorisera le contrle des cots et
favorisera une analyse approprie des dpassements de cots (cart de cots) et dcart de
planning.
Comptition UAV 2013
Document daccompagnement Page 16
Figure 6 Diagramme de Gantt reprsentant la globalit du projet
Comptition UAV 2013
Document daccompagnement Page 17
Exercices
Exercices de rvision sur MatLAB
Soit un espace dtat dont les matrices correspondantes et les valeurs initiales sont :
A = [ 0 2; -3 -5 ];
B = [ 0; 1 ];
C = [ 1 3 ];
D = 0;
u(t) = e
-t
et
X0 = [ 2; 1 ]; Conditions initiales
On obtient la matrice dtat (s) = [sI-A]
-1
par :
syms s; %Dclare une fontion en s
I=eye(2,2); %Dfini une matrice Identit
phi=inv(s*I-A); %Calcule phi
Ce qui donne :
(s) = 1/(s
2
+ 5s +6) * [ (s+5) 2 ]
[ -3 s ]
Puisque X(s) = (s) * X(0) + (s) * BU(s)
u(t) = e
-t
donc U(s) = 1/ (s + 1) qui est le signal dentre
On dfinit comme suit :
U=1/(s+1);
X=phi*X0+phi*B*U;
simple(X) ; Donne diffrentes formes simplifies de la matrice
La rponse donne : X(s) = [ ( 2s
2
+ 14s + 14 ) / ( s +1 ) / ( s + 2 ) / ( s + 3) ]
Comptition UAV 2013
Document daccompagnement Page 18
[ ( s
2
4s 6 ) / ( s +1 ) / ( s + 2 ) / ( s + 3) ]
Ou [ 2*(s^2+7*s+7)/(s+1)/(s^2+5*s+6)]
[ (-4*s-6+s^2)/(s+1)/(s^2+5*s+6) ]
Pour dterminer : Y(s) = C * X(s) + D * U (s)
Y=C*X+D*U;
Y=simple(Y);
La rponse donne: Y(s) = (5s
2
+ 2s -4) / (s + 1) / (s + 2) / ( s + 3)
ou Y(s) = (5s
2
+2s-4)/(s+1)/(s
2
+5s+6)
La solution dans le temps est la transforme inverse de Laplace de Y(s), soit :
y=ilaplace(Y);
Le rsultat est :
y(t) = 17.5 e
-3t
12e
-2t
0.5e
-t
ou
y(t) 35/2*exp(-3*t)-1/2*exp(-t)-12*exp(-2*t)
ce qui est prvisibles tant donn les ples situs aux positions -1 -2 et -3.
Comptition UAV 2013
Document daccompagnement Page 19
Exercices pour lasservissement de laronef
Les exercices qui suivent sont trs pertinent afin de bien comprendre le fonctionnement dun
avion.
Exercice 1 : Le roulis (roll)
Lattitude dun avion est dfinie par ses trois rotations (roll - roulis, pitch - tangage, yaw - lacet)
selon la figure suivante.
Figure 7: Attitude d'un avion
Dessiner un diagramme de bloc fonctionnel pour un systme en boucle ferm qui stabilise la
rotation en roulis (roll). Le systme mesure langle de rotation actuel avec un acclromtre et
la compare langle dsire. Les ailerons rpondent lerreur entre la valeur dsire et langle
mesure en appliquant une dflection angulaire. Lavion ragit cette dflection angulaire
produisant un taux de rotation en roulis. Identifier clairement les entres et les sorties des
actionneurs, des capteurs, du rgulateur, du modle arodynamique de lavion, du modle du
moteur, de la perturbation due au vent ainsi que toutes les variables.
Si le mme avion est modlis avec le schma suivant :
Figure 8 : La commande du roulis
Comptition UAV 2013
Document daccompagnement Page 20
Concevoir le rgulateur qui permet dobtenir une rponse lchelon qui a un bon
comportement et une erreur en rgime permanent nulle.
Avec le schma suivant :
Figure 9: Contrle de route (heading control)
1. Dterminer la valeur du gain minimum K (lorsque Gc(s) = K) de manire ce que la
rponse lchelon unitaire ne soit affecte de moins de 5% lors dune perturbation
Td(s) = 1/s.
2. Dterminer si le gain choisit est stable.
3. Concevoir un premier compensateur (S1) avance de phase de manire ce que le
systme ait une marge de phase de 30 degrs.
4. Trouver les critres de performances obtenues : temps de stabilisation 2%,
dpassement maximum et temps du premier pic.
5. Ajouter un second compensateur (S2) avance de phase de manire obtenir une marge
de phase de 55 degrs.
6. Trouver les critres de performances obtenues : temps de stabilisation 2%,
dpassement maximum et temps du premier pic.
7. Comparer les largeurs de bande de S1 et S2.
Comptition UAV 2013
Document daccompagnement Page 21
Exercice 2 : Le tangage (pitch) et lacclration
La boucle de stabilisation du tangage dun Phantom F4-E est montre dans la figure suivante.
com(s) est la commande de la dflection des canardires pour gnrer un taux de tangage.
Figure 10: Reprsentation de l'asservissement d'un avion
1. Dessiner le lieu des racines de la boucle interne.
2. Trouver K2 de la boucle interne de manire conserver le systme stable (pitch rate
feedback).
3. Trouver la valeur de K2 de la boucle interne afin dobtenir un amortissement de 0.5.
4. Avec la rponse de 3, trouver K1 qui donne un systme total stable.
5. Trouver la valeur de K1 qui donne un amortissement de 0.45.
( )
) 9 . 4 )( 8 . 1 )( 14 (
6 . 1 508
2
+ +
+
=
s s s
s
G
Comptition UAV 2013
Document daccompagnement Page 22
Exercice 3 Le tangage (pitch) dans lespace dtats
Le jet militaire F4-E donn sur la figure suivante est dcrit par :
- an : acclration normale;
- q : le taux de tangage (pitch rate);
- an et q sont commands par la dflection e des elevators (servocommande de
profondeur) et par la dflection des canardires c.
- Une dflection commande com est utilise pour modifier les deux e et c.
Figure 11 : Modlisation dans l'espace des tats
Les fonctions de transfert qui lient les variables sont :
Les quations dtats sont donnes par :
) / 1 (
/
) / 1 (
/ 1
t
t
o
o
t
t
o
o
+
=
+
=
s
K
s
c
com
c
com
e
com
e
n
e
n
q
a
q
a
o
o o (
(
(
+
(
(
(
(
(
(
=
(
(
(
14
0
06 . 282
14 0 0
99 . 31 418 . 1 22 . 0
38 . 263 72 . 50 702 . 1
Comptition UAV 2013
Document daccompagnement Page 23
Trouver les fonctions de transfert suivantes :
) (
) (
) (
) (
) (
) (
2
1
s
s Q
s G
s
s A
s G
com
n
com
n
o
o
=
=
S-ar putea să vă placă și
- Sinus MaticDocument51 paginiSinus MaticDimitri KaboreÎncă nu există evaluări
- Techniques de Recherche D'emploiDocument17 paginiTechniques de Recherche D'emploiDimitri KaboreÎncă nu există evaluări
- Burkina Faso Penal Code FRDocument114 paginiBurkina Faso Penal Code FRDimitri KaboreÎncă nu există evaluări
- Guide Partie2Document35 paginiGuide Partie2Dimitri KaboreÎncă nu există evaluări
- MV003 BatiDocument1 paginăMV003 BatiDimitri KaboreÎncă nu există evaluări
- Mecaniquespatiale CompDocument78 paginiMecaniquespatiale CompDimitri KaboreÎncă nu există evaluări
- Alerme Michel - Les Causes Militaires de Notre DefaiteDocument28 paginiAlerme Michel - Les Causes Militaires de Notre DefaiteDimitri KaboreÎncă nu există evaluări
- Leshuilesvegetales IFHVP121205Document23 paginiLeshuilesvegetales IFHVP121205Dimitri KaboreÎncă nu există evaluări
- SCBD13CG ConceptionDocument35 paginiSCBD13CG ConceptionArsene LineÎncă nu există evaluări
- Rapport Stage Four Solaire Hybride 2009Document19 paginiRapport Stage Four Solaire Hybride 2009Dimitri KaboreÎncă nu există evaluări
- HDRDocument80 paginiHDRAbdelhamid OughanemÎncă nu există evaluări
- Manuel Sur Le Riz FinalDocument44 paginiManuel Sur Le Riz FinalDimitri Kabore0% (1)
- Indignez VousDocument21 paginiIndignez VousgmegamediaÎncă nu există evaluări
- Concept Centrale SolaireDocument7 paginiConcept Centrale SolaireDimitri KaboreÎncă nu există evaluări
- Cours1 Machines ElectriquesDocument108 paginiCours1 Machines ElectriquesGhita Mabrour100% (1)
- La Noix de Cajou AfricaineDocument1 paginăLa Noix de Cajou AfricaineDimitri KaboreÎncă nu există evaluări
- Annuaire Installations Bepita 2.0Document7 paginiAnnuaire Installations Bepita 2.0Dimitri KaboreÎncă nu există evaluări
- 3 Charges de ClimatisationDocument18 pagini3 Charges de ClimatisationDimitri KaboreÎncă nu există evaluări
- Isothermes de Sorption Yves JannotDocument16 paginiIsothermes de Sorption Yves JannotImèneHermassiÎncă nu există evaluări
- Guide Aide Au Montage Horizon 2020 Version Mars 2014 307293Document39 paginiGuide Aide Au Montage Horizon 2020 Version Mars 2014 307293Dimitri KaboreÎncă nu există evaluări
- 01 - Dossier Symboles HydrauliquesDocument11 pagini01 - Dossier Symboles HydrauliquesLehleh Rida0% (1)
- 7 Les Mesures D'économie D'engDocument8 pagini7 Les Mesures D'économie D'engDimitri KaboreÎncă nu există evaluări
- Correction Vue D'arriereDocument1 paginăCorrection Vue D'arriereDimitri KaboreÎncă nu există evaluări
- Anemometre A Fil Chaud Fva605Document1 paginăAnemometre A Fil Chaud Fva605Dimitri KaboreÎncă nu există evaluări
- Livre Electronique NumeriqueDocument144 paginiLivre Electronique NumeriqueFadi AzizÎncă nu există evaluări
- TD3 PistonDocument1 paginăTD3 PistonDimitri KaboreÎncă nu există evaluări
- Guide de Redaction PDFDocument17 paginiGuide de Redaction PDFTarik AzkakÎncă nu există evaluări
- TD2 RPA OuvertDocument1 paginăTD2 RPA OuvertDimitri KaboreÎncă nu există evaluări
- Cours GRCDocument14 paginiCours GRCDimitri KaboreÎncă nu există evaluări
- TD1 RPA FermeDocument2 paginiTD1 RPA FermeDimitri KaboreÎncă nu există evaluări
- Conception Et Réalisation D'un Enregistreur de DonnéesDocument66 paginiConception Et Réalisation D'un Enregistreur de DonnéesSofien MaghraouiÎncă nu există evaluări
- XN Ini 01Document2 paginiXN Ini 01andevrosÎncă nu există evaluări
- Optimisation 12Document27 paginiOptimisation 12Noùr Elhoùdà100% (1)
- SMPPSIMDocument12 paginiSMPPSIMAbdelhak TebaiÎncă nu există evaluări
- DSI2 - POO - Chapitre1 - Introduction GénéraleDocument11 paginiDSI2 - POO - Chapitre1 - Introduction GénéraleOumayma NaffetiÎncă nu există evaluări
- Modelisation GarchDocument7 paginiModelisation GarchJilani OsmaneÎncă nu există evaluări
- Ad Acp3Document5 paginiAd Acp3SioudaÎncă nu există evaluări
- Ecricome 2012 eDocument3 paginiEcricome 2012 emarwaneeee100% (1)
- Ds BLD BD Bactec Fx40 Blood Culture System BR enDocument2 paginiDs BLD BD Bactec Fx40 Blood Culture System BR enGustavo AltamiranoÎncă nu există evaluări
- Microprocesseur68000 Hardware SignauxDocument40 paginiMicroprocesseur68000 Hardware SignauxGhettas Abdel WahabÎncă nu există evaluări
- Commutation: Exemple ARP/PPPDocument5 paginiCommutation: Exemple ARP/PPPMed Zakaria El Qasmi100% (1)
- 5a Bascules PDFDocument15 pagini5a Bascules PDFJohn LwisÎncă nu există evaluări
- TD1 QuantificationDocument2 paginiTD1 QuantificationHassene Seddik100% (1)
- La TCI Par OrdinateurDocument10 paginiLa TCI Par OrdinateurDavid MartinÎncă nu există evaluări
- Excel 2010 ComDocument419 paginiExcel 2010 ComFrank Etoa Jr. SankaraÎncă nu există evaluări
- Cours MS Word-ExcelDocument34 paginiCours MS Word-Excelbilavid44Încă nu există evaluări
- Fiche Cours ASINSA1 PolynomeDocument6 paginiFiche Cours ASINSA1 PolynomemedqelaiÎncă nu există evaluări
- Controle ContinuDocument2 paginiControle ContinuwillyÎncă nu există evaluări
- Vérification Variante D'escalier en Béton Armé Villa 3Document17 paginiVérification Variante D'escalier en Béton Armé Villa 3Zebiri FouadÎncă nu există evaluări
- Sujet Corrige EF Structure Machine 2017Document2 paginiSujet Corrige EF Structure Machine 2017kali100% (1)
- Rapport de StageDocument39 paginiRapport de StageRédoùàneMoùhàfidÎncă nu există evaluări
- Conception Avec PICDocument89 paginiConception Avec PICnawzat100% (4)
- Expressions RégulièresDocument5 paginiExpressions RégulièresMohamed DiopÎncă nu există evaluări
- TCP-IP v3Document22 paginiTCP-IP v3Mogwai MonoÎncă nu există evaluări
- TD 2Document5 paginiTD 2Ab YayaÎncă nu există evaluări
- PrsenatationassembleurDocument155 paginiPrsenatationassembleurgo88Încă nu există evaluări
- Modelisation D'une Bibliothèque ÉlectroniqueDocument20 paginiModelisation D'une Bibliothèque ÉlectroniqueKay El100% (1)
- TD5Document2 paginiTD5Monia SalemÎncă nu există evaluări
- Installation Configuration ZabbixDocument18 paginiInstallation Configuration Zabbixapi-271974953100% (3)
- Formation OpenStackDocument280 paginiFormation OpenStackDorra LabidiÎncă nu există evaluări