Documente Academic
Documente Profesional
Documente Cultură
Design and Construction of Mini-Robot For Gas LP Detection Using A Mobile Device
Încărcat de
Saurabh BhiseTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Design and Construction of Mini-Robot For Gas LP Detection Using A Mobile Device
Încărcat de
Saurabh BhiseDrepturi de autor:
Formate disponibile
1
Abstract In this paper, we present the design and
construction of a mini-robot for gas LP detection with
concentrations from 200 to 10,000 ppm. An application on a
mobile device (tablet) to manipulate the mini-robot system,
when it is not able to avoid an obstacle by itself, was carried
out successfully. Also, this application recipes a signal when
the mini-robot has detected an LP gas concentration and
then, the mobile device activates an alarm and it sends
automatically a signal to put the mini-robot in fully stop
mode. The LP gas concentration for its detection is
established in the control system, and this can be modified
according to user needs. The communication between the
mobile device and the mini-robot system was carried out by
means of wireless protocol Bluetooth. In addition, the mini-
robot can detect obstacles using an ultrasonic sensor, and
also remember its last turn. The results show the effective
implementation of this kind of mini-robot system, it has
advantages such as: low cost, small, simple, and it uses a
mobile device.
Keywords Autonomous Mobile Mini-robot, Application
for Mobile Device, LP Gas Detection.
I. INTRODUCCIN
A MINI-ROBTICA se ha convertido en una disciplina
cientfica importante tanto en el mbito de la investigacin,
como en el desarrollo tecnolgico en el mundo entero. Esto es
debido a las diferentes aplicaciones que encuentran utilizando
estos sistemas mecatrnicos modernos de bajas dimensiones y de
bajo costo [1-3]. Los mini-robots se dividen en cuatro categoras:
terrestres, acuticos, areos y espaciales, en este trabajo solo nos
limitaremos a los mini-robots terrestres, especficamente a los
dotados con ruedas, ya que son los ms utilizados debido a su
simplicidad, fcil construccin, por su capacidad de carga, mayor
control y estabilidad mecnica, aunque tienen un desventaja a que
se limitan a terrenos planos y que los posibles obstculos que se
presenten no deben ser mayores al tamao de las ruedas [2-3]. Un
robot diferencial se componen de dos ruedas en un eje comn,
cada rueda se controla independientemente, puede realizar
movimientos en lnea recta, en arco y sobre su propio eje de
contacto de rodamiento, requiere de una o dos ruedas adicionales
para balance o estabilidad, para lograr un movimiento en lnea
recta requiere que las dos ruedas de traccin giren a la misma
1
A. G. Barrientos, Universidad Politcnica de Pachuca, Mxico,
abel@upp.edu.mx.
J. C. G.Vidal, Universidad Politcnica de Pachuca, Mxico,
juliocgv@upp.edu.mx.
E. S. E. Quesada, Universidad Politcnica de Pachuca, Mxico,
steed@upp.edu.mx.
J. P. O. Oliver, Universidad Politcnica de Pachuca, Mxico,
patricio@upp.edu.mx.
F. R. T. Macotela, Universidad Politcnica de Pachuca, Mxico,
trejo_macotela@upp.edu.mx
M. O. Dominguez, Universidad Politcnica de Pachuca, Mxico,
mortiz@upp.edu.mx.
velocidad [1-5]. Un robot autnomo puede ser definido como un
mecanismo autnomo completo o parcial, que es capaz de operar
de diferentes modos para la ejecucin de las tareas programadas,
puede ser de manera autnoma cumpliendo sus objetivos sin la
ayuda humana o de manera teleoperado, estos ltimos son
manipulados a distancia por un ser humano mediante una interfaz
hombre mquina, por lo que esta clase de robots pueden realizar
una amplia variedad de tareas industriales, cientficas, domsticas
y comerciales, sin embargo an es necesario optimizar estos
sistemas mecatrnicos modernos [6-9].
El impulso en el uso de robots mviles se expresa en la necesidad
de extender el campo de aplicaciones de la robtica, empezando
principalmente en poseer un espacio de trabajo ilimitado, a
diferencia de los robots manipuladores fijos los cuales estn
restringidos a cumplir tareas dentro de un espacio de trabajo
determinado por sus dimensiones fsicas [1-3]. Por lo tanto, con la
finalidad de aumentar la movilidad del robot y de esta manera su
capacidad de trabajo, se requiere desarrollar un robot de bajo
costo y robusto para la deteccin de gas LP en zonas de
gasoductos. Adems, estos robots deben tener la capacidad de
adaptarse a una gran diversidad de terrenos y actuar en ambientes
no estructurados, ya sea en modo autnomo o por medio de
teleoperacin. En el trmino autonoma se hace referencia
principalmente a la capacidad del robot para responder ante
situaciones cambiantes, ambiguas o impredecibles sin necesidad
de la supervisin humana, esto se lleva a cabo utilizando
sensores, dando as una mayor capacidad al mini-robot de
adaptacin a diferentes escenarios. Aunque ya se han ya
desarrollado algunos robots de este tipo [6-18] ninguno ellos ha
sido manipulado con un dispositivo mvil y ms an como
interfaz hombre-mquina usando un dispositivo mvil.
En este trabajo de investigacin se presenta el diseo y
construccin de un mini-robot para la deteccin de fugas de
gas LP en zonas de gasoductos para concentraciones de 200 a
10,000 ppm. Para llevar a cabo la manipulacin exitosamente del
mini-robot se desarroll una aplicacin en un dispositivo mvil,
un tableta. Esta interfaz se utiliza cuando el mini-robot no es
capaz de esquivar un obstculo por s mismo, y ms an sta
aplicacin activa una alarma cuando el robot ha detectado una
concentracin de gas LP y automticamente activa el robot en
modo de paro total. La deteccin de la concentracin de gas LP es
establecida en el control del sistema, y esta puede ser modificada
de acuerdo a las necesidades del usuario. La comunicacin entre
el dispositivo mvil y el mini-robot fue llevada a cabo por medio
de una comunicacin inalmbrica por el protocolo Bluetooth.
Adems, el mini-robot es capaz de detectar obstculos mediante
un sensor ultrasnico, as como tambin recordar su ltimo giro,
esto es para poder seguir con la ejecucin de su tarea especfica
en este caso buscar la fuga de gas LP. Los resultados muestran
una aplicacin efectiva de esta clase de mini-robots de bajo
costo, as como tambin la incorporacin de un dispositivo
mvil para su manipulacin efectiva.
Design and Construction of Mini-Robot for Gas LP
Detection Using a Mobile Device
A. G. Barrientos, J. C. G.Vidal, E. S. E. Quesada, J. P. O. Oliver, F. R. T. Macotela and M. O. Domnguez
L
IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 6, DECEMBER 2013 1295
II. DISEO DEL MINI-ROBOT MVIL
El primer diseo mecnico del mini-robot mvil se llev a
cabo utilizando el programa de computadora de Solidworks. En
esta parte se definieron dimensiones del robot mini-robot,
tomando en cuenta algunas especificaciones tales como las
dimensiones de los actuadores y sensores, la forma de
locomocin, necesidades que demanda la aplicacin, entre otras.
Adems, se asumieron las siguientes hiptesis: el robot mvil se
mueve sobre una superficie plana horizontal, es decir, la energa
potencial es constante, los ejes de guiado son perpendiculares al
suelo, no existen elementos flexibles en la estructura del robot,
incluyendo las ruedas. El contacto entre cada rueda y el suelo se
reduce a un solo punto y no existe deslizamiento. El diseo
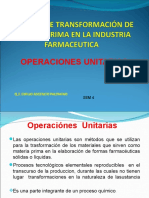
mecnico del mini-robot final se muestra en la Fig. 1.
Para la instrumentacin electrnica se utilizaron los siguientes
dispositivos: un microcontrolador PIC16F1826 por su gran
desempeo en su alta velocidad, la capacidad de conectar
perifricos y an ms pueden funcionar a 1.8 V. Se utiliz un
sensor de gas LP MQ-5, el cual detecta bajo ciertas caractersticas
ambientales como temperatura, presin y gravedad, el flujo o
masa de aire que contenga gas propano, butano o metano. El
sensor MQ-5 es usado para deteccin de fugas de gas en equipos
industriales al igual en algunas reas del hogar, son adecuados
para la deteccin de gas LP, butano, propano, gas natural, alcohol
y humo de cigarrillo. Tambin se utiliz el sensor ultrasnico XL-
MaxSonar-EZ MB1240, ste se caracteriza por tener alta potencia
en sus salidas, cuentan con calibracin automtica en tiempo real
para poder ajustarse a diferentes condiciones como temperatura,
voltaje y ruido acstico o elctrico, con esto se puede asegurar de
que recibe la mayor parte confiable de los datos de cada lectura
tomada. Esta clase de sensor detecta objetos desde 0 cm a 765 cm
con una resolucin de 1 cm. Las principales caractersticas que
tiene este sensor son sus diferentes salidas de lectura, ya que
cuenta con una salida PWM, salida analgica y una salida serial
RS232. Este sensor ayuda a detectar los obstculos del mini-
robot, ya que est embarcado sobre un servomotor, por lo que
tiene un grado de libertad, movindose de 0 a 180 grados. Para
los actuadores se utilizaron dos motorreductores B01, los cuales
son ligeros y de gran calidad, cuenta con un eje de 5.3 mm de
dimetro aplanado por ambos lados a 3.6 mm y orificios para
facilitar su montaje con tornillos, tambin cuenta con reduccin
1:87. El motorreductor tiene un rango de voltaje de alimentacin
de 3 a 12 V DC y su caracterstica principal es el bajo consumo
de corriente, por lo que se requiere un driver de bajas prestaciones
para operarlo, en este caso se utiliz el circuito integrado L293, el
cual es capaz de transferir corrientes en dos direcciones de hasta 1
A y con voltajes que van desde los 4.5 hasta los 36 V.
2.1 Programacin del Algoritmo de Control
Se identifica la idea principal de la lgica del programa
mediante un diagrama de flujo y posteriormente se interpretara en
un lenguaje de programacin para el microcontrolador
PIC16f1827. En la Fig. 2 se muestra la lgica del programa que
se realiz en el microcontrolador del robot, en el cual se tiene un
inicio y es ah donde se encienden los motores, despus checa si
existe una concentracin de gas LP mayor a 3000 ppm, esta
cantidad puede ser elegida por el usuario, si esto es cierto
entonces enciende la alarma del dispositivo mvil y manda la
instruccin de paro total y termina el programa. En caso contrario
avanza hacia adelante hasta encontrarse con un obstculo, en este
caso el robot gira a la derecha hasta esquivar dicho obstculo,
despus de esto checa el sensor de gas LP y nuevamente vuelve a
preguntar si existe una concentracin de gas LP mayor a la
cantidad programada, si esto es afirmativo entonces enciende la
alarma del dispositivo mvil y finaliza el programa. En caso
contrario, el robot sigue hacia delante, checando la concentracin
de gas LP en todo instante, y cuando el robot vuelve a encontrar
un obstculo, ste gira a la izquierda hasta evadir dicho obstculo
y nuevamente vuelve a checar la concentracin de gas LP.
Cuando el robot se mueve en lnea recta checa la concentracin
de este gas cada 2 segundos.
Figura 1. Diseo mecnico final del mini-robot.
Un algoritmo para detectar la difusin de olor real es
complicado, sin embargo si la estrategia de bsqueda de la
fuente no depende de su gradiente de concentracin, por lo
tanto, es relativamente fcil encontrar dicha fuente. As que,
una gran parte de la informacin del sensor necesita ser
procesada rpidamente por el robot mvil durante la bsqueda
de gas LP en tiempo real. Para realizar esta tarea se utiliz el
algoritmo descrito en la ref. [10], donde la distribucin de gas
de una fuente puntual est dada por:
( )
( ) ( )
( ) ( )
sin cos
2
exp
2
) , (
2 2
y y x x x
y ys x x d
x d
K
v
Kd
q
y x c
s s
s s
s
+ =
+ =
=
(1)
donde ds es la distancia de la fuente (m), xes la proyeccin
de distancia de ds sobre la direccin del viento, c es la
concentracin (ppm), q es la razn emitida por el gas (mL/s), v
es la velocidad del flujo del aire (m/s), K es el coeficiente de
difusin turbulento (m
2
/s) y es el ngulo del eje x a la
direccin del viento.
1296 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 6, DECEMBER 2013
Figura 2. Diagrama de flujo del programa desarrollado en el microcontrolador
del mini-robot.
2.2. Desarrollo de la Interfaz Grfica con Android
La interfaz grfica se utilizar para tener el control de
encendido y apagado del mini-robot mvil, al igual se podr
visualizar la alerta que nos mande el mini-robot mvil cuando
ste haya detectado una fuga de gas LP. Esta clase de interfaz de
usuario en Android se puede desarrollar e implementar de varias
formas. Una de ellas es definirla en la propia clase de la actividad,
aunque esta forma, aparte de ser poco elegante y poco
estructurada, no proporciona una diferenciacin clara entre el
propio cdigo de la aplicacin y el de la interfaz. Por lo que la
forma ms recomendada y la que se utiliz en este desarrollo de
interfaz es mediante XML. Esta interfaz grfica se construy a
travs de controles llamados Views que son el punto de
interaccin con el usuario. Los Views son la clase base para la
creacin de widgets como por ejemplo botones, campos de texto,
checkbox, etc. Por otro lado tenemos la clase ViewGroup que son
contenedores de Views o incluso de otros ViewGroup. Un
diagrama a bloques de esta interfaz desarrollada en este proyecto
se puede observar en la Fig. 3a. Al inicio, activa el mdulo de
Bluetooht y pregunta si esta visible, si la respuesta es verdadera
entonces se conectan ambas, una vez conectados pregunta un
cdigo de 4 nmeros para como cdigo de seguridad. Al conectar
el mini-robot con el dispositivo mvil, la interfaz tiene la opcin
de inicio y de salir, ver Fig. 3b. Al iniciar la tarea de bsqueda, el
robot mvil realiza cualquier trayectoria y es capaz de evadir
obstculos, y una vez localizada la fuga de gas LP, este manda un
mensaje en la pantalla del dispositivo mvil indicando que ha
encontrado la fuga y en automtico desactiva cualquier conexin
y el robot mvil entra en estado OFF, ver Fig. 4.
III. RESULTADOS
En esta seccin se muestran los resultados obtenidos de cada
etapa del robot mvil, as como tambin los resultados
experimentales del mismo y finalmente el funcionamiento por
completo del mini-robot desarrollando su tarea especfica, el de
encontrar la fuga de gas LP en un terreno adverso. Las
dimensiones fsicas del mini-robot estn dadas en la tabla 1, estas
dimensiones son dadas en centmetros. Para el movimiento del
robot se utilizaron dos moto-reductores, los cuales son activados
mediante una seal de PWM, con un ciclo de trabajo del 20% a
una frecuencia de 50 Hz, tal como se muestra la Fig. 5, donde se
puede observar un tiempo en alto de 2 ms. Los resultados
experimentales muestran que el robot puede encontrar la fuga de
gas LP en un corto tiempo. La velocidad de bsqueda es rpida,
ya que el robot es ligero y opera bajo una condicin de flujo de
aire constante. Si se incrementa la velocidad del robot al doble,
por ejemplo, ste no podr encontrar la fuga de gas LP debido a
que no tendr el tiempo suficiente para encontrar la concentracin
deseada. El tiempo de bsqueda del robot puede ser un poco ms
de 2 horas, esto es debido al bajo consumo de potencia y a la
incorporacin de una batera de alto rendimiento. Debido a sus
dimensiones fsicas, el robot tiene la capacidad de explorar zonas
donde para el ser humano es inaccesible, por lo tanto este clase de
robots tambin puede encontrar aplicacin en tareas de bsqueda.
Tabla 1: Dimensiones fsicas del mini-robot.
Dimensin
Largo 15 cm
Ancho
Alto
Dimetro en las ruedas
Velocidad mxima
Tiempo mximo de operacin
12 cm
18 cm
10 cm
10 cm/s
2 horas
GARCIA et al.: DESIGN AND CONSTRUCTION OF MINI 1297
(a)
(b)
Figura 3. Diagrama a bloques del desarrollo e implementacin de la interfaz
de usuario en Androi (a). Pantalla de incio al conectar el mini-robot con el
dispsotovo mvil mediante el protocolo Bluetooht (b).
Figura 4. Pantalla de aviso del dispositivo mvil cuando el robot ha
encontrado la fuga de gas LP.
Figura 5. Seal PWM con ciclo de trabajo del 20% para el control de los
motorreductores.
El mini-robot tiene embarcado un sensor ultrasnico XL-
MaxSonar-EZ MB1240, el cual le dice al robot a que distancia se
encuentran los obstculos. ste sensor esta sobre un servomotor
para poder girar de 0 a 180 grados y as detectar un obstculo,
entonces el robot decide a donde girar o inclusive retroceder. Para
posicionar el sensor, el servomotor es manipulado para mediante
una seal PWM para tener las posiciones de 0, 45, 90 grados con
un tiempo en alto de 1, 1.5 y 2 ms, respectivamente.
El diseo electrnico, as como tambin el ensamble del sistema
con la interfaz grfica en un dispositivo mvil para la
manipulacin del robot se muestran en la Fig. 6. La interfaz de
usuario del dispositivo mvil es amigable y fcil de
entendimiento para que cualquier usuario pueda operar fcilmente
el robot. Para verificar el desempeo del mini-robot mvil, una
ejecucin se realiz sobre una superficie lisa con obstculos. El
recorrido inicia al momento que emparejamos el mdulo
Bluetooth del mini-robot mvil con el modulo Bluetooth del
dispositivo mvil por medio de la interfaz y cuando se ha
realizado el emparejamiento nos despliega un botn para iniciar la
tarea de bsqueda. Una vez puesto en marcha el robot, se pudo
probar el desplazamiento en lnea recta, ya que para esto las dos
ruedas deben girar a la misma velocidad. Cuando adems de
realizar una trayectoria, el robot utiliza el sensor ultrasnico, este
mismo ya puede desplazarse en lnea recta y lograr esquivar cada
uno de los obstculos. Al momento que tiene que escoger a que
direccin debe desplazarse, ya sea girar hacia el lado derecho o
izquierdo cuando ste se encuentra de frente con un obstculo, lo
realiza correctamente tomando en cuenta especio fsico de cada
lado y as como tambin elegir la distancia adecuada, dando como
resultado un sistema autnomo perfecto. Para completar todo el
proceso, y ms an la deteccin de fugas de gas LP, se suministro
una cantidad de gas sobre un rea de trabajo del robot y el
resultado fue que el mini-robot detecto la concentracin de gas
LP despus de 2 minutos en operacin y automticamente envi
la alerta al dispositivo del operador, tal como se muestra en el
video en youtube (http://www.youtube.com/watch?v=DY2-
Vee4r_k&feature=em-upload_owner). Los resultados muestran
que el mini-robot mvil puede resolver el problema de una
deteccin de gas LP y an ms posicionarse donde existe la
mayor concentracin, es decir donde se tiene una fuga de ste, la
deteccin de la concentracin puede ser programa por el usuario.
Este robot tambin puede encontrar otras aplicaciones tales como
1298 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 6, DECEMBER 2013
en el rescate de personas despus de un desastre natural donde es
imposible el acceso.
Figura 6. Prototipo final, junto con la interfaz de usuario.
IV. CONCLUSIONES
El diseo y construccin de un mini-robot mvil autnomo
aplicado para detectar fugas de gas LP en zonas de gasoductos
para concentraciones de 200 a 10,000 ppm utilizando un
dispositivo mvil para su manipulacin fue llevado acabo
exitosamente. Cuando este mini-robot mvil detecta una
concentracin de gas LP establecida en el control,
inmediatamente transmite una notificacin de alerta, por medio de
la comunicacin inalmbrica Bluetooth, a un dispositivo mvil en
este caso una tableta. El mini-robot es capaz de detectar
obstculos mediante su sensor ultrasnico y recordar su giro
anterior, esto para evitar obstculos y as poder seguir con su
tarea especfica. Este dispositivo mecatrnico tiene costos muy
bajos de fabricacin y un desempeo excelente.
AGRADECIMIENTOS
Este trabajo ha sido realizado parcialmente gracias al apoyo
del CONACYT-Mxico bajo el proyecto CB-CONACYT
169062, y mediante el financiamiento de SEP-PROMEP-Mxico
bajo el proyecto de la red temtica de fuentes de Energas
Alternas UPPACH-CA-10.
REFERENCIAS
[1] Bolton, William, Mechatronics: a multidisciplinary approach, Ed.
Pearson, Edinburgh, UK. Cuarta Edicin, 2010.
[2] J. Z. Guo, A. K. Guo, Crossmodal interactions between olfactory and
visual learning in drosophila, Science, 307-310 pp., 2005.
[3] H. Ishida, H. Tanaka, H. Taniguchi, Mobile robot navigation using
vision and olfaction to search for a gas/odor source, Autonomous Robot,
231-238, 2006.
[4] Fujun He, Zhijiang Du, Xiaolei liu, and Yingfei Sun, Indoor Dangerous
Gas Environment Detected by Mobile Robot, Proceedings of the 2009
IEEE International Conference on Robotics and Biomimetics, December
19 -23, 2009, Guilin, China.
[5] J M. R. Wandel, A, Gas distribution in unventilated indoor
environments inspected by a mobile robot, Proceedings of 2003
International Conference on Advanced Robot. Vol. 1, pp. 507-512,
2003.
[6] A. T. Hayes, A. Martinoli, and R. M. Goodman, Distributed odor
source localization, IEEE Sensors, Special Issue on Artificial Olfaction,
Vol. 2, pp. 260-271, 2002.
[7] D. Zarzhitsky, D. F. Spears, and W. M. Spears, Distributed robotics
approach to chemical plume tracing, Proceedings of 2005 IEEE/RSJ
International Conference on Intelligent Robots and Systems, Vol. 2, pp.
2974-2979, 2005.
[8] A. Lilienthal, and T. Duckett, A stereo electronic nose for a mobile
inspection robot,, Proceedings of the First International Workshop on
Robotic Sensing. Vol.1, pp. 1-6, 2003.
[9] A. Lilienthal, and T. Duckett, Experimental analysis of smelling
Braitenberg Vehicles, Proceedings of 2003 International Conference
on Advanced Robot, Vol. 4, pp. 375-380, 2003.
[10] B. Porat and A. Nehorai, Localizing vapor-emitting sources by moving
sensors, Signal Processing, Vol. 44, 1996, pp. 1018-1021.
[11] H. Ishida, K. Suetsugu, and T. Nakamoto, Study of autonomous mobile
sensing system for localization of odor source using gas sensors and
anemometric sensors, Sens. Actuators A. Vol.45, pp. 153-157, 1994.
[12] H. Ishida, Y. Kagawa, T. Nakamoto, et al, Odor source localization in
the clean room by an autonomous mobile sensing system, Sens.
Actuators B. Vol. 33, pp. 115-121, 1996.
[13] Reyes Corts, Fernando, Robtica. Control de Robots Manipuladores,
Primera edicin: Alfaomega Grupo Editor, Mxico, 2011.
[14] R. A. Russell, D. Thiel, R. Deveza, DQG A. Mackay-Sim, A robotic
system to locate hazardous chemical leaks, Proceedings of the 2006
IEEE International Conference on Robotics and Automation. Vol. 1, ,
pp. 556-561, 2006
[15] A. Loutfi, S. Coradeschi, L. Karlsson, DQG M. Broxvall, Using an
electronic nose on multi-sensing mobile robot, Proceedings of 2004
IEEE/RSJ International Conference on Intelligent Robots and Systems.
pp. 337-342., 2004.
[16] H. Ishida, T. Nakamoto, DQG T. Mpriizumi, Remote sensing of
gas/odor source localization and concentartion using mobile system,
Sensors and Actuators, Vol 49, pp. 52-57, 1998.
[17] Matsukura, H. ; Yoneda, T. ; Ishida, H., Smelling screen: Presenting a
virtual odor source on a LCD screen, Proc. IEEE Virtual Reality (VR),
pp.167-168, 2013.
[18] Ping Jiang, Qing-Hao Meng, Ming Zeng, Ji-Gong Li. Mobile robot gas
source localization via top-down visual attention mechanism and shape
analysis. Proceedings of the 8th World, Congress on Intelligent Control
and Automation, Jinan, China, 1818-1823pp., 2010
Dr. Abel Garcia Barrientos was born in Tenancingo,
Tlaxcala, Mexico, in 1979. He received the Licenciatura
degree in Electronics from the Autonomous University of
Puebla, Mexico, in 2000, and the M.Sc. and Ph.D. degree
in Electronics from the National Institute for Astrophysics,
Optics, and Electronics (INAOE), Tonantzintla, Puebla, in
2003 and 2006, respectively. Since 2007 he joined as a
researcher at the Mechatronics Department at the
Polytechnic University of Pachuca, Mexico. In 2009 he was a Post-Doctoral
Fellow at the Micro- and Nano-Systems Laboratory at the McMaster
University, Ontario, Canada and in 2010 Dr. Garcia-Barrientos was a Post-
Doctoral Fellow at the Advanced Materials and Device Analysis group of
Institute for Microelectronics, Technische Universitat Wien, too. His scientific
interests include device simulation, semiconductor device modeling, high-
frequency electronics, and nanoelectronics. He has been member of SNI since
2008 until 2014, level 1.
Julio Cesar Gonzalez Vidal received the Engineering
degree in Mechatronics from Universidad Politecnica de
Pachuca, Zempoala, Hidalgo, Mexico, in 2012, and now he
is a Master student in Mechatronics in the same University.
His current research interests are applications of
computacional, robotics, and biomechatronics.
GARCIA et al.: DESIGN AND CONSTRUCTION OF MINI 1299
Dr. Eduardo Steed Espinoza Quesada was born in the
"Estado de Mxico", Mxico, in April 1981. He got the
bachelors degree in Electronic and Telecommunications
Engineering in August 2004 and the M.Sc. degree in
Automation and Control in September 2006 from
Universidad Autnoma del Estado de Hidalgo. He is
actually studying the Ph.D. degree in Automatic Control in the Centro de
Investigacin y de Estudios Avanzados del Instituto Politcnico Nacional,
Departamento de Control (LAFMIA UMI CNRS 3175 - CINVESTAV),
Mxico, from January 2010 to December 2012. Since September 2006, he
holds a post as researcher professor in the Universidad Politcnica de
Pachuca, Hidalgo, Mxico. His research interests are in process automation,
design, modeling and control of mini UAV (Unmanned Aerial Vehicles),
linear control theory and non-linear control with applications in automation
and Real-time control applications (Electronic Instrumentation,
Microcontrollers, Microprocessors and Motor Control) and Digital signal
processing.
Dr. Patricio Ordaz Oliver naci en Mxico en 1980.
Recibi el grado de Licenciatura en Ingeniera en
Electrnica y Telecomunicaciones as como el grado de
Maestro en Ciencias en Automatizacin y Control por la
Universidad Autnoma del Estado de Hidalgo en 2005 y
2007, respectivamente. Obtuvo el grado de Doctor en
Ciencias en Control Automtico por el Centro de
Investigaciones y Estudios Avanzados del Instituto Politcnico Nacional en
2012. Actualmente es profesor Investigador en la Universidad Politcnica de
Pachuca. Sus reas de inters son en los campos de modelado y anlisis de
Robots, anlisis no lineal, teora de control, teora de realimentacin de salida,
diseo de control robusto y adaptable. Es miembro del S.N.I de CONACyT
nivel C. E-mail: patricio@upp.edu.mx
Dr. Francisco Rafael Trejo Macotela was born in
Alfajayucan, Hidalgo, Mexico, in 1976. He received the
Licenciatura degree in Electronics from the Instituto
Tecnologico de Queretaro, Mexico, in 1999, and the M.Sc.
and Ph.D. degree in Electronics from the National Institute
for Astrophysics, Optics, and Electronics (INAOE),
Tonantzintla, Puebla, in 2001 and 2006, respectively. In 2006 he joined as a
researcher at the Mechatronics Department at the Polytechnic University of
Pachuca, Mexico. In 2007 he became Head of Mechatronics Department at
the same University. Since 2008, he joined as a researcher at the Telematics
Department at the Polytechnic University of Pachuca, Mexico. His scientific
interests include Integrated Circuits design, Analog and Digital design, RF
and Low Voltage design.
Martin Ortiz Dominguez was born in Naucalpan, Estado
de Mexico, in 1979. He received the Licenciatura en Fsica
y Matemticas, especialidad en Fsica from Escuela
Superior de Fsica y Matemticas, Instituto Politcnico
Nacional and the Master degree from the same institute, in
2004 and 2007, respectively. He recived his PhD degree in
Mechanical Engineering from Escuela Superior de
Ingeniera Mecnica y Elctrica-Zacatenco, Instituto Politcnico Nacional in
2012. His scientific interests include materials, mechanical desing, and wear.
Since 2012, he is a full professor in the Universidad Politecnica de Pachuca.
1300 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 6, DECEMBER 2013
S-ar putea să vă placă și
- Manual. Merida YucatánDocument96 paginiManual. Merida YucatánindruinÎncă nu există evaluări
- Recuperacion de Calor CALDERASDocument97 paginiRecuperacion de Calor CALDERASAlex MarlonÎncă nu există evaluări
- Catalogo Postes PDFDocument7 paginiCatalogo Postes PDFAlexis Garmendia GÎncă nu există evaluări
- NLBDocument2 paginiNLBSergio Roberto Cabrera BurgosÎncă nu există evaluări
- Programa de Mantenimiento Sprinter Ncv3 Chasis 906.6Document3 paginiPrograma de Mantenimiento Sprinter Ncv3 Chasis 906.6Ángela MárquezÎncă nu există evaluări
- Tmert VivexDocument39 paginiTmert VivexSebastian Narvaez BerettaÎncă nu există evaluări
- Solucion Del Cableado EstructuradoDocument20 paginiSolucion Del Cableado EstructuradooskarromeroÎncă nu există evaluări
- Drones periodismo comunicaciónDocument79 paginiDrones periodismo comunicaciónアルバロ グティエレス マンサノÎncă nu există evaluări
- Practica de Laboratorio Capacitadores y DielectricosDocument8 paginiPractica de Laboratorio Capacitadores y DielectricosFernanda Zamorano AriasÎncă nu există evaluări
- Mesas para Soldadura PDFDocument8 paginiMesas para Soldadura PDFAlejandro Bedoya100% (1)
- Ju-001-06-0511-0000-31-02-0015 - Torqueo y Apriete de Pernos A325-A307Document17 paginiJu-001-06-0511-0000-31-02-0015 - Torqueo y Apriete de Pernos A325-A307Yorman Carrasco ReyesÎncă nu există evaluări
- Catálogo de Conceptos - Etapa 2-Infra 12 - GarcíaDocument1 paginăCatálogo de Conceptos - Etapa 2-Infra 12 - GarcíaJULIAN SOLISÎncă nu există evaluări
- Tarea 8 Fundamentos de La AdministracionDocument6 paginiTarea 8 Fundamentos de La AdministracionWalter Figueroa FilippiÎncă nu există evaluări
- Materiales de ConstruccionDocument61 paginiMateriales de ConstruccionSteeven CampañaÎncă nu există evaluări
- CD 3291 PDFDocument102 paginiCD 3291 PDFSant CupuÎncă nu există evaluări
- Tesis 1Document2 paginiTesis 1Anonymous twh9rFIVÎncă nu există evaluări
- Ventura Fernando DeberDocument6 paginiVentura Fernando DeberJOSEPH FRANCISCO ALMACHI PALADINESÎncă nu există evaluări
- Q SPK KW Usermanual EsDocument28 paginiQ SPK KW Usermanual EsArs Nova Ocotlan100% (1)
- Ficha Tecnica 2018 Vandex Am-10 Rev 05Document2 paginiFicha Tecnica 2018 Vandex Am-10 Rev 05andresÎncă nu există evaluări
- Presentacion Corte Por Chorro de AguaDocument15 paginiPresentacion Corte Por Chorro de AguaAntonio Valdez RuizÎncă nu există evaluări
- Informe 6Document6 paginiInforme 6daniellgb96Încă nu există evaluări
- Operación ExcavadorasDocument88 paginiOperación ExcavadorasLo Miranda Proyecto-xÎncă nu există evaluări
- OPPERACIONES UNITARIAS MejoradaaDocument130 paginiOPPERACIONES UNITARIAS MejoradaaMarita Ordoñez75% (8)
- Viscosímetro de FannDocument10 paginiViscosímetro de FannMaria Jaldin Arancibia100% (1)
- Examen Electricidad Pcpi Test Nº1Document2 paginiExamen Electricidad Pcpi Test Nº1jose ignacio cañar toapantaÎncă nu există evaluări
- Curso de profundización SCM y logísticaDocument89 paginiCurso de profundización SCM y logísticaMichael CastroÎncă nu există evaluări
- Sikaforce-7750 L 100 PDFDocument2 paginiSikaforce-7750 L 100 PDFCesar Orlando Stuardo NavarroÎncă nu există evaluări
- Campo Electrico y M. VerticalDocument3 paginiCampo Electrico y M. VerticalJose Wanner Garcia JaldinÎncă nu există evaluări
- Diseño de cajas para sistemas de reducción de velocidadesDocument8 paginiDiseño de cajas para sistemas de reducción de velocidadesJeanPiereServanFernandezÎncă nu există evaluări
- Teoria de Coulomb - Civ 443'SFVDocument3 paginiTeoria de Coulomb - Civ 443'SFVStark FortunatoÎncă nu există evaluări