S-ar putea să vă placă și
- 9 Slides CPUDocument8 pagini9 Slides CPUapi-19967001Încă nu există evaluări
- Wk01a ComputerSystemsDocument33 paginiWk01a ComputerSystemsapi-19967001Încă nu există evaluări
- PDP 8 DPDocument27 paginiPDP 8 DPapi-19967001Încă nu există evaluări
- Chapter 2Document48 paginiChapter 2api-19967001Încă nu există evaluări
- Cis600 2Document39 paginiCis600 2danielmoore27Încă nu există evaluări
- Fetch Cycle PresentationDocument32 paginiFetch Cycle Presentationapi-19967001Încă nu există evaluări
- Basic Computer Organization CH-4Document27 paginiBasic Computer Organization CH-4api-19967001Încă nu există evaluări
- CPU Organisation & Operation: Professor Kin K. Leung Heavily Based On Materials by Dr. Naranker DulayDocument25 paginiCPU Organisation & Operation: Professor Kin K. Leung Heavily Based On Materials by Dr. Naranker Dulayapi-19967001Încă nu există evaluări
- Hardwired ControlDocument6 paginiHardwired Controlapi-19967001Încă nu există evaluări
- The Fetch&executeDocument7 paginiThe Fetch&executeapi-19967001Încă nu există evaluări
- Instruction CycleDocument1 paginăInstruction Cycleapi-19967001Încă nu există evaluări
- Addressing ModesDocument2 paginiAddressing Modesapi-19967001Încă nu există evaluări
- General Instruction FormatDocument6 paginiGeneral Instruction Formatapi-19967001Încă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Important Alloy CompositionDocument2 paginiImportant Alloy CompositionRSLÎncă nu există evaluări
- Ult Studio Config 71Document18 paginiUlt Studio Config 71JoséGuedesÎncă nu există evaluări
- Analysis of 3PL and 4PL ContractsDocument8 paginiAnalysis of 3PL and 4PL ContractsGoutham Krishna U BÎncă nu există evaluări
- 10 Ways To Speed Up Torrent DownloadsDocument5 pagini10 Ways To Speed Up Torrent DownloadsricoffanyÎncă nu există evaluări
- Super PaveDocument20 paginiSuper PaveHashem EL-MaRimeyÎncă nu există evaluări
- A320-25-1BPK R01 Dt. 25.05.21Document39 paginiA320-25-1BPK R01 Dt. 25.05.21Pradeep K sÎncă nu există evaluări
- Quiz 12Document3 paginiQuiz 12mwende faiyuuÎncă nu există evaluări
- 1756 Controllogix I/O ModulesDocument7 pagini1756 Controllogix I/O ModulesminurajraÎncă nu există evaluări
- RDSO Guidelines - Bs 112 - Planning of Road Over BridgesDocument9 paginiRDSO Guidelines - Bs 112 - Planning of Road Over BridgesAnkur MundraÎncă nu există evaluări
- LV SWBDQualityInspectionGuideDocument72 paginiLV SWBDQualityInspectionGuiderajap2737Încă nu există evaluări
- AutoCAD CommandsDocument59 paginiAutoCAD Commandsamalendu_biswas_1Încă nu există evaluări
- Selective photocatalytic recovery of platinum, rhodium and palladiumDocument8 paginiSelective photocatalytic recovery of platinum, rhodium and palladiumSarangÎncă nu există evaluări
- Canon Ir3245 Series-PcDocument154 paginiCanon Ir3245 Series-PcPetrescu CezarÎncă nu există evaluări
- Revue Des Études Juives. 1880. Volumes 71-73.Document706 paginiRevue Des Études Juives. 1880. Volumes 71-73.Patrologia Latina, Graeca et OrientalisÎncă nu există evaluări
- Fuel Pressure Regulator - Remove and InstallDocument3 paginiFuel Pressure Regulator - Remove and InstallGerardo VelazquezÎncă nu există evaluări
- Marine Seawater ValvesDocument8 paginiMarine Seawater ValvesPhornlert WanaÎncă nu există evaluări
- Anchor Bolt BiAxialDocument10 paginiAnchor Bolt BiAxialALPHYL BALASABASÎncă nu există evaluări
- Diagnostic Trouble Code ChartDocument5 paginiDiagnostic Trouble Code ChartGregory AshleyÎncă nu există evaluări
- Katalog Menadzer 2013 EnglDocument119 paginiKatalog Menadzer 2013 EnglMarko MiladinovićÎncă nu există evaluări
- Experiment Central 2010Document1.481 paginiExperiment Central 2010D BASU100% (1)
- Voltage Divider Bias Stabilizes BJT Transistor OutputDocument5 paginiVoltage Divider Bias Stabilizes BJT Transistor OutputMalikAlrahabiÎncă nu există evaluări
- LATERAL EARTH PRESSURE CALCULATIONSDocument55 paginiLATERAL EARTH PRESSURE CALCULATIONSRakesh SheteÎncă nu există evaluări
- Type 3025 Sizes P462, P460-200 and P900 Diaphragm Actuator: Bulletin 61.1:3025Document8 paginiType 3025 Sizes P462, P460-200 and P900 Diaphragm Actuator: Bulletin 61.1:3025Datt NguyenÎncă nu există evaluări
- CalibrationDocument7 paginiCalibrationstolen mechieducÎncă nu există evaluări
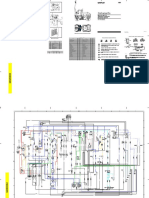
- Electric Schematic CB113 114 QENR2003 PDFDocument2 paginiElectric Schematic CB113 114 QENR2003 PDFHipac TapicuÎncă nu există evaluări
- Reconfigurable Vivaldi Antenna With Improved Gain For Uwb ApplicationsDocument5 paginiReconfigurable Vivaldi Antenna With Improved Gain For Uwb ApplicationsSubhanjali MyneniÎncă nu există evaluări
- NACA Report 184 The Aerodynamic Forces On Airship HullsDocument16 paginiNACA Report 184 The Aerodynamic Forces On Airship Hullsshatal16Încă nu există evaluări
- Vena SIF Piping CalculationDocument5 paginiVena SIF Piping CalculationPratap KollapaneniÎncă nu există evaluări
- Linear System Theory and Desing PDFDocument688 paginiLinear System Theory and Desing PDFJose David MartinezÎncă nu există evaluări
- Installation & Maintenance Instructions Pressure Regulator With Integral Pilot Regulator R18Document2 paginiInstallation & Maintenance Instructions Pressure Regulator With Integral Pilot Regulator R18luis ivanÎncă nu există evaluări