S-ar putea să vă placă și
- Day 2 Part 1 Dist PrincipleDocument24 paginiDay 2 Part 1 Dist Principlestopnaggingme1100% (1)
- Control Systems Formula SheetDocument12 paginiControl Systems Formula SheetliamhrÎncă nu există evaluări
- 2009 IBC Seismic For Abu DhabiDocument8 pagini2009 IBC Seismic For Abu DhabiErnest NavarroÎncă nu există evaluări
- Control System Toolbox™ ReferenceDocument787 paginiControl System Toolbox™ ReferenceKhai HuynhÎncă nu există evaluări
- Process Dynamics and Control, Ch. 8 Solution ManualDocument12 paginiProcess Dynamics and Control, Ch. 8 Solution ManualBen SpearmanÎncă nu există evaluări
- Lecture 9-10 - Frequency Response MethodsDocument68 paginiLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Switch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times2Document8 paginiSwitch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times2VIJAYPUTRAÎncă nu există evaluări
- Antenna Azimuth Position Control System Modelling, AnalysisDocument30 paginiAntenna Azimuth Position Control System Modelling, AnalysisMbongeni Maxwell100% (3)
- Frequency ResponseDocument30 paginiFrequency ResponseGovind KumarÎncă nu există evaluări
- CDS 101, Lecture 8.1 R. M. Murray, CaltechDocument7 paginiCDS 101, Lecture 8.1 R. M. Murray, CaltechPhisathoÎncă nu există evaluări
- EE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineDocument14 paginiEE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineAkmaral NauryzgalievaÎncă nu există evaluări
- P, P Z (O / P) OFF OFF OFF OFF ON ON ON OFF ON ON ON OFF: EC-GATE-2013 PAPERDocument31 paginiP, P Z (O / P) OFF OFF OFF OFF ON ON ON OFF ON ON ON OFF: EC-GATE-2013 PAPERa_barbate1147Încă nu există evaluări
- Frequency Response AnalysisDocument33 paginiFrequency Response AnalysisShiraz HusainÎncă nu există evaluări
- CDS 101, Lecture 9.2 R. M. Murray, CaltechDocument7 paginiCDS 101, Lecture 9.2 R. M. Murray, Caltechtidjani86Încă nu există evaluări
- Gate 2013 SolutionDocument31 paginiGate 2013 SolutionManish SinghÎncă nu există evaluări
- Ece 2013 PDFDocument31 paginiEce 2013 PDFnagesh2670_223365519Încă nu există evaluări
- C&i Lab-2019Document67 paginiC&i Lab-2019aniruthÎncă nu există evaluări
- Frequency ResponseDocument9 paginiFrequency ResponseAnanda RamanÎncă nu există evaluări
- EE-EC - RIB (W) - Control Sys - 13-08-16 - SK1-sol - 1391Document9 paginiEE-EC - RIB (W) - Control Sys - 13-08-16 - SK1-sol - 1391arunÎncă nu există evaluări
- Module 2 - 2Document68 paginiModule 2 - 2abcdÎncă nu există evaluări
- Lecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveDocument6 paginiLecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveVan Nguyen Huu VanÎncă nu există evaluări
- Math 5Document37 paginiMath 5Anonymous UrzdtCB0IÎncă nu există evaluări
- BodeDocument8 paginiBodeeeetistÎncă nu există evaluări
- IgbtDocument9 paginiIgbtKarthikrajan SendhilnathanÎncă nu există evaluări
- CH 11Document48 paginiCH 11Bulli KoteswararaoÎncă nu există evaluări
- Process ControlDocument55 paginiProcess ControlUmair IqbalÎncă nu există evaluări
- Practical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitleDocument20 paginiPractical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitlealwaysharshÎncă nu există evaluări
- Chapter 4 Characteristics of Closed-Loop SystemsDocument25 paginiChapter 4 Characteristics of Closed-Loop SystemsDio ChanÎncă nu există evaluări
- Bode Plot Design PDFDocument15 paginiBode Plot Design PDFsmileuplease8498Încă nu există evaluări
- Gate - in 2011Document18 paginiGate - in 2011prabhjot singh1Încă nu există evaluări
- Frequecny Response of Lag NetworkDocument4 paginiFrequecny Response of Lag NetworkAnbalagan GuruÎncă nu există evaluări
- Modelling Sigdelta Non-IdealtiesDocument5 paginiModelling Sigdelta Non-IdealtiesVivek KumarÎncă nu există evaluări
- G4PC50Document8 paginiG4PC50LidystonPeronÎncă nu există evaluări
- CSD Practical MannualDocument35 paginiCSD Practical MannualitsurturnÎncă nu există evaluări
- Bod ElectDocument14 paginiBod ElectPrema Vinod PatilÎncă nu există evaluări
- CS-Lab Assignment-6 1913123Document35 paginiCS-Lab Assignment-6 1913123karthik rajuÎncă nu există evaluări
- Introduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkDocument37 paginiIntroduction To Switched-Mode Converter Modeling Using MATLAB/SimulinkAhana MalhotraÎncă nu există evaluări
- Lab Report - Exp 7 - 1913145Document12 paginiLab Report - Exp 7 - 1913145Sumon TenpassÎncă nu există evaluări
- In-Building Propagation Modelling: John Litva January 31, 2007Document49 paginiIn-Building Propagation Modelling: John Litva January 31, 2007Krispi FruttiÎncă nu există evaluări
- Control System Performance PDFDocument18 paginiControl System Performance PDFChibueze EzeokaforÎncă nu există evaluări
- Super Buffer Design Driving Large Capacitive Loads: Prepared byDocument14 paginiSuper Buffer Design Driving Large Capacitive Loads: Prepared byTamil SelvanÎncă nu există evaluări
- Chapter 13Document27 paginiChapter 13vishiwizardÎncă nu există evaluări
- Control System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKDocument18 paginiControl System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKKiranKumarÎncă nu există evaluări
- hw2 SolDocument11 paginihw2 SolSaied Aly SalamahÎncă nu există evaluări
- Comparison TDDB ModelsDocument8 paginiComparison TDDB ModelsThomas W KotowskiÎncă nu există evaluări
- PD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaDocument42 paginiPD, PI, PID Compensation: M. Sami Fadali Professor of Electrical Engineering University of NevadaAsghar AliÎncă nu există evaluări
- Exam 1Document61 paginiExam 1Sara M. DheyabÎncă nu există evaluări
- Phase Lead and Lag CompensatorDocument8 paginiPhase Lead and Lag CompensatorNuradeen MagajiÎncă nu există evaluări
- 1 - Compensator Design Procedure - Lead - Lag - With ExamplesDocument12 pagini1 - Compensator Design Procedure - Lead - Lag - With ExamplesMadhav SÎncă nu există evaluări
- Time & Frequency Response of The System Using MATLAB: SoftwareDocument9 paginiTime & Frequency Response of The System Using MATLAB: SoftwareVenkatesh KumarÎncă nu există evaluări
- CONTROL SYSTEMS Set - 2 PDFDocument10 paginiCONTROL SYSTEMS Set - 2 PDFmaheshbabu527Încă nu există evaluări
- All All T NDocument9 paginiAll All T Nhr.rayhmanÎncă nu există evaluări
- Ar Adl - : Answer: (C)Document17 paginiAr Adl - : Answer: (C)smrahimÎncă nu există evaluări
- Pspice Tutorial AcDocument89 paginiPspice Tutorial AcZadziorÎncă nu există evaluări
- Step Response For The Transfer Function of A Sensor PDFDocument22 paginiStep Response For The Transfer Function of A Sensor PDFcesarinigillasÎncă nu există evaluări
- CS Exp 8Document7 paginiCS Exp 8Anirudh MittalÎncă nu există evaluări
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDe la EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsÎncă nu există evaluări
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDe la EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportÎncă nu există evaluări
- Skee ExamDocument5 paginiSkee ExamEsther AzmirÎncă nu există evaluări
- Introduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDocument49 paginiIntroduction To Design: Refer Textbook Control Systems Engineering by Nagrath, GopalDeepthiÎncă nu există evaluări
- PFC Small SignalDocument14 paginiPFC Small SignalMeral MeralÎncă nu există evaluări
- Aicd Exam SolutionDocument16 paginiAicd Exam SolutionTenzin ChoendenÎncă nu există evaluări
- ADC Driver Reference Design Optimizing THD, Noise, and SNR For High Dynamic Range InstrumentationDocument22 paginiADC Driver Reference Design Optimizing THD, Noise, and SNR For High Dynamic Range InstrumentationAdrian SuÎncă nu există evaluări
- Chapter 7 - Bode Plot and Gain Compensation (Part 2)Document18 paginiChapter 7 - Bode Plot and Gain Compensation (Part 2)Thanes WaranÎncă nu există evaluări
- Approach To Design For StabilityDocument8 paginiApproach To Design For Stabilitymdurna2000Încă nu există evaluări
- Control SystemsDocument8 paginiControl SystemspadmajasivaÎncă nu există evaluări
- A Novel Current Steering Charge Pump With LowDocument4 paginiA Novel Current Steering Charge Pump With LowAhmed ShafeekÎncă nu există evaluări
- Energies: Design and Implementation of A Low-Power Low-Cost Digital Current-Sink Electronic LoadDocument14 paginiEnergies: Design and Implementation of A Low-Power Low-Cost Digital Current-Sink Electronic LoadciccioÎncă nu există evaluări
- Modeling and Control For Current Mode Buck Converter With A Secondary LC Filter PDFDocument8 paginiModeling and Control For Current Mode Buck Converter With A Secondary LC Filter PDFkamalÎncă nu există evaluări
- C 4558Document6 paginiC 4558Codinasound Ca100% (1)
- Eico 1963 CatalogDocument28 paginiEico 1963 CatalogbhaidriÎncă nu există evaluări
- Laboratory 4 - Feedback and CompensationDocument6 paginiLaboratory 4 - Feedback and CompensationbaymanÎncă nu există evaluări
- Tps 54231Document31 paginiTps 54231pvickyÎncă nu există evaluări
- Introduction To Power Electronics - CourseraDocument5 paginiIntroduction To Power Electronics - Courserabvgiri0% (6)
- MicroCap Info Fall2008Document15 paginiMicroCap Info Fall2008wayan.wandira8122Încă nu există evaluări
- Comparison of PWM Voltage Vs Current Mode Control Vs Hysteretic ModeDocument6 paginiComparison of PWM Voltage Vs Current Mode Control Vs Hysteretic ModeBai Nguyen NoiÎncă nu există evaluări
- Experiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemDocument3 paginiExperiment No. 5 Study of The Effect of A Forward-Path Lead Compensator On The Performance of A Linear Feedback Control SystemSubhaÎncă nu există evaluări
- Control SystemsDocument8 paginiControl SystemsprakashjntuÎncă nu există evaluări
- Sistemas de Control para El Desarrollo de IngenieríaDocument23 paginiSistemas de Control para El Desarrollo de IngenieríajesusÎncă nu există evaluări
- U I (UIU) : Expt. No. 9 F R A MDocument5 paginiU I (UIU) : Expt. No. 9 F R A MMaksud SarkerÎncă nu există evaluări
- Lag Lead Compensation Theory (Found in Google)Document10 paginiLag Lead Compensation Theory (Found in Google)Subhashish SahooÎncă nu există evaluări
- Design of Two Stage Compensated Cmos Opamp-1Document3 paginiDesign of Two Stage Compensated Cmos Opamp-1Varun AroraÎncă nu există evaluări
- Bode Handout PDFDocument29 paginiBode Handout PDFSuhas ShirolÎncă nu există evaluări
- A 1-Gbs, 0.7 Um CMOS Optical Receiver With Full Rail-to-Rail Output SwingDocument7 paginiA 1-Gbs, 0.7 Um CMOS Optical Receiver With Full Rail-to-Rail Output SwingGrigÎncă nu există evaluări
- Compensators - GATE Study Material in PDFDocument10 paginiCompensators - GATE Study Material in PDFnidhi tripathiÎncă nu există evaluări
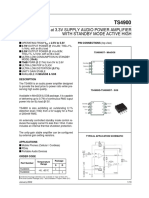
- 300Mw at 3.3V Supply Audio Power Amplifier With Standby Mode Active HighDocument19 pagini300Mw at 3.3V Supply Audio Power Amplifier With Standby Mode Active HighPanagiotis PanagosÎncă nu există evaluări