Segundo Congreso Virtual, Microcontroladores y sus Aplicaciones
Congreso 2010, Pgina 1
Inversor modulado por ancho de pulso, ancho de pulso uniforme y
ancho de pulso optimizado programable.
Rigoberto Martnez Mndez
Instituto Tecnolgico de Apizaco
Departamento de Metal-mecnica, Ingeniera electrnica
Mxico
Correo-e: rigo_martinezm (at) yahoo.com.mx
Abstract. Los convertidores de corriente directa a corriente alterna (CD/CA), son dispositivos
ampliamente usados en varias aplicaciones. Su uso abarca desde pequeas fuentes de energa para
equipo electrnico hasta fuentes de alto poder para control de motores industriales, hornos de
fundicin o generadores elctricos. Sin embargo las tcnicas de conversin emplean dispositivos de
conmutacin que generan corrientes armnicas que contaminan la red elctrica causando fallas en la
red de suministro y sobrecalentamiento en los conductores. Diversas tcnicas de conmutacin se han
inventado con el fin de incrementar la eficiencia reducir el contenido armnico tanto en la red de
alimentacin como a la salida del convertidor. El presente documento describe el diseo y prueba de
un convertidor monofsico utilizando 3 tcnicas de conmutacin con el fin de demostrar las
caractersticas de cada una. El ncleo del sistema es un microcontrolador PIC16F873. Se presentan
grficas de armnicos y formas de onda de salida del inversor.
1 Introduccin
Los convertidores de corriente directa a corriente
alterna (CD/CA) tambin llamados inversores son
dispositivos electrnicos cuya aplicacin abarca
desde fuentes de poder para computadoras, sistemas
de alimentacin ininterrupible (SAI), que reciben la
energa de fuentes de CD como por ejemplo, celdas
solares o bateras y la convierten a una seal alterna
ya sea sinusoidal o cuadrada, a veces del mismo
voltaje que la seal de entrada o multiplicando el
voltaje el voltaje de entrada. As por ejemplo, son
muy comunes los convertidores en los autos que
toman la energa de la batera, 12VCD y tienen una
salida de 110VAC o 220VAC para alimentar aparatos
tales como televisores, etc. Una aplicacin muy
importante de los convertidores se da en la industria,
para el control de motores de las mquinas o
procesos. Los inversores se usan bsicamente para
variar la velocidad de los motores variando el voltaje,
corriente o la frecuencia de salida que alimenta al
motor. Las mltiples aplicaciones y el uso extendido
de los convertidores hacen que el estudio de la teora
y prctica del funcionamiento de los convertidores
sea obligado para cualquier tcnico o ingeniero cuyo
campo de trabajo tenga que ver con la electricidad.
En este trabajo se dise y fabric un mdulo
convertidor CD/AC monofsico para uso didctico
con el fin de que los estudiantes de estos dispositivos
comparen objetivamente las ventajas y desventajas de
varios tipos de conmutacin [1].
1.1 Circuito de conmutacin
El principio bsico de funcionamiento de un inversor
es convertir la corriente directa a corriente alterna por
medio de dispositivos de conmutacin que pueden ser
transistores, MOSFETS, IGBTs, tiristores. etc. Los
convertidores bsicamente se dividen en monofsicos
y trifsicos, segn el tipo de salida. Adems existen
diferentes configuraciones para conmutar la corriente.
Por ejemplo convertidores push pull, convertidores
de medio puente o convertidores de puente completo.
Cada configuracin posee caractersticas diferentes
en cuanto a rendimiento, complejidad de control,
estrs para los dispositivos de conmutacin, etc.
Fig. 1. Convertidor CD/CA, configuracin de
puente completo. La corriente aplicada a la carga
se hace alterna controlando el encendido y
apagado de los dispositivos de conmutacin Q.
2
En este trabajo se emple la configuracin de puente
completo (Fig. 1) que tiene la ventaja de ser ms
eficiente en la conversin y es menor el voltaje
inverso que deben soportar los dispositivos de
conmutacin. Una ligera desventaja es que el control
de conmutacin es ms complejo que para un push-
pull o un circuito de medio puente. Adems de que
se requiere una etapa de aislamiento entre el circuito
de control y los dispositivos de conmutacin. Para los
dispositivos de conmutacin se emplearon
Transistores bipolares de compuerta aislada (IGBT
por sus siglas en ingls) que combinan las mejores
cualidades de los MOSFETS, con una compuerta
(gate) activada por voltaje y alta velocidad de
conmutacin pero adems, una alta capacidad de
corriente como los transistores bipolares. El
funcionamiento del circuito es simple y se basa en la
activacin secuencial controlada de los IGBTs por
parejas, primero Q1 y Q2, y a continuacin Q3 y Q4.
De esta manera la carga recibir una corriente alterna
aunque cuadrada. La fig. 2 muestra los pulsos de
activacin y el voltaje en la carga.
Fig. 2. Pulsos de activacin de los IGBTs y
voltaje "visto" por la carga.
1.2 Tipos de modulacin
La salida cuadrada generada por este tipo de
conmutacin es rica en contenido armnico,
corrientes parsitas de frecuencia mayor a la
fundamental que tienen efectos negativos en la red de
alimentacin y en los equipos que se alimentan de
ella. Las corrientes parasitas deforman las seales,
causan voltajes superficiales en los conductores
calentndolos, disparos errticos de dispositivos
termo-magnticos de proteccin, y menor eficiencia
en el uso de la energa. Adems de la contaminacin
a la red general de alimentacin que se castiga en
varios pases con un mayor costo. Con el fin de
reducir el alto contenido armnico tpico de las ondas
cuadradas generadas por los convertidores y mejorar
la eficiencia de los convertidores, se han inventado
diversas tcnicas de conmutacin. En este trabajo
utilizamos las ms comunes Modulacin por ancho
de pulso (PWM), generada analgica y digitalmente.
Modulacin por ancho de pulso uniforme (UPMW) y
Modulacin por ancho de pulso optimizado
(OPWM) generadas digitalmente usando un
microcontrolador.
1.2.1 PWM
La modulacin por ancho de pulso consiste en
generar una onda cuadrada de frecuencia constante
con duracin de pulso variable. El voltaje efectivo a
la salida vara con la amplitud del pulso el cual puede
variar desde 0 hasta 100% del periodo de la onda. En
la fig. 3 se observa una seal PWM con ancho de
pulso de 50%.
Fig. 3 Seal PWM al 50% de ancho de pulso ().
Adems de generar PWM usando el
microcontrolador, el circuito diseado tambin cuenta
con generacin PWM usando un circuito analgico
con el fin de comparar ambos tipos de PWM. El
circuito analgico se realiz usando un TLC494
(National semiconductors), ver fig. 4. La ventaja de
generar PWM con circuitos analgicos es que
permiten una resolucin infinita en la variacin de
ancho de pulso, algo no disponible cuando se genera
digitalmente.
Fig. 4. Generacin analgica de PWM usando un
TLC494.
Segundo Congreso Virtual, Microcontroladores y sus Aplicaciones
Congreso 2010, Pgina 3
1.2.2 UPWM
Modulacin por ancho de pulso uniforme (UPWM)
consisten en la generacin de varios pulsos en lugar
de slo uno como es el caso del PWM simple. Esta
tcnica permite reducir el contenido armnico al
disminuir la magnitud de las armnicas de baja
frecuencia y aumentando las de alta frecuencia que
pueden ser eliminadas ms fcilmente con filtros. El
voltaje de salida con este tipo de modulacin est
dado por la Ec. 1.
p
V
s
Ec.1
Donde:
P= numero de pulsos.
= Ancho de pulso.
La desventaja de este tipo de modulacin es que los
dispositivos de conmutacin requieren ser ms
veloces, hay mayores perdidas por conmutacin y es
necesario un control ms complejo. La fig. 5 muestra
la salida UPWM para un UPWM con 2 pulsos.
Fig. 5 Modulacin UPWM con dos pulsos.
El diseo implementado en este trabajo permite
seleccionar desde 2 hasta 5 pulsos por cada media
onda.
1.2.3 OPWM
La modulacin por amplitud de pulso optimizado
(OPWM) permite eliminar armnicas selectivamente
controlando el tiempo exacto de activacin de los
conmutadores. Ya que las armnicas son peridicas
y mltiplos de la frecuencia fundamental, mediante el
clculo de un ngulo de desplazamiento en el
disparo de los conmutadores y generando seales
simtricas es posible eliminar la armnica de orden n.
La figura 6 muestra una seal OPWM con dos
ngulos de disparo simtricos que permite eliminar
dos armnicas.
Fig. 6. Salida OPWM con ngulos de activacin
en 1 y 1. La onda debe ser simtrica.
La enorme ventaja de esta tcnica es la eliminacin
casi por completo de las armnicas en forma
selectiva. As, es posible eliminar las de menor
frecuencia dejando las de frecuencia superior que se
pueden eliminar fcilmente con filtro simples. La
desventaja es la complejidad para el clculo y
generacin de los pulsos de disparo necesarios para
un buen funcionamiento, mayores prdidas por
conmutacin, y sistema de control ms complejo. El
clculo de los ngulos de disparo se realiza
calculando la serie de Fourier de la seal de salida.
Por ejemplo en el caso de dos ngulos o bien, para
eliminar dos armnicas se obtiene la ecuacin 2.
( ) ( ) ( )
2 . ..........
2 2 1 2 1 4
4 2 /
2
2
1
1
0
Ec
n
Cosn Cosm V
B
t td Senn t td Senn t td Senn
V
B
s
n
s
n
+
=
+ =
Donde Bn es uno de los componentes del voltaje de
salida dado por la ecuacin 3 o bien, los armnicos
componentes de la seal.
( )
=
=
,... 5 , 3 , 1
0
n
n
t n Sen B v Ec. 3
Haciendo B=0 para n= 1 y 2 obtenemos un sistema
de ecuaciones como el mostrado en la ec. 4.
0 2 5 2 1 5 2 1
0 2 3 2 1 3 2 1
= +
= +
Coa Cos
Coa Cos
Ec. 4
Resolviendo el sistema de ecuaciones (Ec. 4)
obtenemos los valores de 1 y 2.
El sistema diseado solicita el valor de estos ngulos
para genera la seal OPWM.
4
1.1 Microcontrolador y algoritmo
El microcontrolador (C) elegido fue el PIC16F873
(MICROCHIP ) cuyas prestaciones y capacidades
(4kB de memoria Flash, 196 bytes de RAM y
frecuencia mxima de reloj de 20MHz ) cumplen con
los requerimientos del sistema [2]. El C gestiona un
teclado de 4 teclas, una pantalla LCD de 16 x 2
caracteres HITACHI () y genera los pulsos de
control a los IGBTs por medio de un algoritmo
implementado en la memoria FLASH. El circuito de
control se muestra en la fig. 7.
Fig. 7 Circuito de control principal. El ncleo del
sistema es un microcontrolador PIC16F873.
Aunque el C cuenta con un mdulo PWM de
10bits, la frecuencia del oscilador principal (20MHz)
da como resultado frecuencias de PWM de varias
decenas de kHz, como mnimo. Dado que se desea
que el convertidor sea capaz de generar frecuencias
de 50 0 60Hz se decidi implementar generacin
PWM por medio de software. Adems de la misma
manera, se dise la generacin de los pulsos de
control UPWM y OPWM por medio de software. La
Fig. 8 muestra un diagrama a bloques del control
digital del inversor implementado en el
microcontrolador.
Fig. 8 Diagrama a bloques del control digital
La adquisicin de datos consiste en una rutina para
aceptar los parmetros que el usuario determina para
la seal de salida del convertidor. Estos datos pueden
ser, la frecuencia, el tipo de modulacin, el ancho de
pulso, el valor de los ngulos de disparo en el mdulo
OPWM o el nmero de disparos cada medio ciclo en
el modo UPWM.
El mdulo diseado tiene una interfaz como la que se
muestra en la figura 9. El cual permite seleccionar
varios parmetros dependiendo de que tipo de
modulacin se desee generar.
Fig. 9 Panel de control del mdulo convertidor diseado. Cuenta con una pantalla LCD (18) para ver los
parmetros programados y la salida del inversor. Bornes de conexin para conectar la carga (1-4) y para
observar los pulsos de control, botones (7-10), potencimetros (13-14) para la variacin del voltaje y
frecuencia en el modo PWM anlogo y tambin el contraste en la pantalla (6) interruptores para el control
de varios parmetros como elegir entre que voltaje y frecuencia para variar usando los botones (11), elegir
entre el modo analgico o digital (12) y para apagar o encender el mdulo (5), adems tres LEDs de
indicacin.
Segundo Congreso Virtual, Microcontroladores y sus Aplicaciones
Congreso 2010, Pgina 5
Para PWM analgico permite una variacin de
frecuencia de 650 a 2000Hz, con variacin de
ancho de pulso de 0 a 99%. Para el PWM generado
digitalmente, el rango de frecuencia elegible es de
20 a 999Hz con incrementos de 1Hz, con variacin
de ancho de pulso de 1 a 99% con incrementos de
1%. La figura 11 muestra la seal de salida del
mdulo convertidor para una modulacin tipo
PWM digital a 60Hz. Seal real y seal simulada.
Fig. 10 Seal real y simulada para la
modulacin PWM con ancho de pulso al 50%,
Frecuencia de salida a 60Hz.
En el caso de la modulacin UPWM permite elegir
de 2 a 5 pulsos por cada medio ciclo de la seal.
Rango de frecuencia de 20 a 99Hz con incrementos
de 1Hz y tambin permite variar el ancho del pulso
de 0 a 99% relativos al ancho mximo permitido
dependiendo de cuantos pulsos se deseen. La
figura 12 muestra la salida para una modulacin
tipo UPMW con dos pulsos por cada medio ciclo.
Fig. 11 Modulacin UPWM con dos pulsos por
muesca, seal real y simulada. Ancho de pulso al
50% , frecuencia de salida, 60Hz.
En la figura 13 se muestra el diagrama de flujo que
fue implementado en el microcontrolador para la
modulacin UPWM. La generacin de pulsos de
disparo se basa en el temporizador 1 del
microcontrolador el cual activa una interrupcin
cuando llega al tiempo programado. El tiempo
programado en el temporizador se calcula cuando el
usuario introduce los datos iniciales. El chequeo del
teclado se realiza por medio de interrupciones
cuando cambia alguna entrada del puerto B. Al
inicio el microcontrolador siempre carga por
defecto los valores necesarios para funcionar en el
modo PWM a 60Hz con 50% de ancho de pulso. La
diferencia entre la rutina del PWM y el UPWM es
solamente que la variable Num_Pul que determina
cuantos pulsos por cada medio ciclo es uno para
PWM y de 2 a 5 para UPWM.
Fig. 12 Diagrama de flujo programado en el
microcontrolador para el control UPWM.
Para la modulacin por OPWM el mdulo
permite elegir la frecuencia en un rango entre 20 a
999Hz. Permite elegir la eliminacin programada
de 2 a 5 armnicas para lo cual pide el valor de los
ngulos de disparo, un ngulo de disparo por cada
armnica que se desea eliminar. La figura 14
muestra la salida del convertidor en el modo de
OPWM generando una seal con dos muescas
disparadas a 23.89 y 33.17 calculados para
eliminar la 3a y 5ta armnica. Los resultados se
muestran debajo de la seal donde se constata una
eliminacin casi absoluta de esas armnicas
alcanzando una distorsin total armnica (THD) de
48.8%. Ntese que la 7 armnica no fue eliminada,
6
tal como se esperaba, sin embargo estas frecuencias
ms altas, alejadas de la fundamental, en este caso
60Hz, son ms fciles de eliminar mediante filtros.
Fig. 13 Voltaje de salida en el modo OPWM y
Amplitud de las armnicas presentes en esa
seal.
2 Sistema de seguridad
El mdulo convertidor tiene un sistema de
monitorizacin de corriente en el circuito puente. El
circuito de seguridad inmediatamente suspende los
pulsos a los IGBTs cuando se detecta que la
corriente a travs de ellos sobrepasa un lmite
establecido en 10 A, que es un 70% la capacidad
mxima de los IGBTs. La corriente es
monitorizada por medio de una resistencia de 0.1
en serie con la carga. Esa resistencia provoca una
cada de voltaje proporcional a la corriente que la
atraviesa. El voltaje en los bornes de esa resistencia
es comparado con otro de referencia el cual est
conectado a un microcontrolador PIC16F84 que
controla en modo maestro las los pulsos enviados a
los IGBTs provenientes del circuito de control.
3 Conclusiones
En este trabajo se describe un sistema convertidor
DC/AC monofsico, tambin conocido como
inversor. El aporte de este trabajo es el circuito de
control realizado con un microcontrolador el cual
permite generar tres tipos de modulacin, PWM
(Modulacin por ancho de pulso), UPWM
(Modulacin por ancho de pulso uniforme) y
OPMW (Modulacin por ancho de pulso
optimizado). Hasta donde el autor sabe, no existe
actualmente un dispositivo comercial con las
mismas caractersticas. El mdulo convertidor se
diseo para funcionar como equipo didctico para
el rea de electrnica de potencia a nivel
universitario. Actualmente este mdulo est siendo
usado en el laboratorio de electrnica en el Instituto
tecnolgico de Apizaco.
Referencias
[1] Muhammad H. Rashid. Electrnica de
potencia (circuitos, dispositivos y
aplicaciones). Segunda edicin. Ed. Pearson
education.
[2] Microchip. Inc. Hoja de datos del
microcontrolador PIC16F873. Disponible en:
http://www.microchip.com/wwwproducts/devi
ces.aspx?ddocname=en010235
Copyright 2010. Rigoberto Martnez Mndez: El autor delega a la Organizacin del Segundo Congreso
Virtual de Microcontroladores la licencia para reproducir este documento para los fines del Congreso ya sea que
este artculo se publique en el sitio web del congreso, en un CD o en un documento impreso de las ponencias del
Segundo Congreso Virtual de Microcontroladores.
S-ar putea să vă placă și
- Instructivo Armado Carretila Pretul CAP50NBDocument2 paginiInstructivo Armado Carretila Pretul CAP50NBRigo Martinez MÎncă nu există evaluări
- Diagnóstico de Transporte PúblicoDocument17 paginiDiagnóstico de Transporte PúblicoRigo Martinez MÎncă nu există evaluări
- Salgado-Alamilla Et Al. - 2016 - Análisis de La Aceleración Postural y ElectromiogrDocument6 paginiSalgado-Alamilla Et Al. - 2016 - Análisis de La Aceleración Postural y ElectromiogrRigo Martinez MÎncă nu există evaluări
- Transformadas InversasDocument6 paginiTransformadas InversasRigo Martinez MÎncă nu există evaluări
- Calendario2013 2014Document1 paginăCalendario2013 2014Lizbeth AndesÎncă nu există evaluări
- Autodiagnóstico Con MultímetroDocument4 paginiAutodiagnóstico Con MultímetroRigo Martinez MÎncă nu există evaluări
- Banco de Preguntas 3er. P. Sistemas Digitales IDocument5 paginiBanco de Preguntas 3er. P. Sistemas Digitales ICarlos ChoqueÎncă nu există evaluări
- 7W (CLASE D,7,4 V/4 Ω,THD=10%) 10W (CLASE D,9V/4Ω,THD=10%) 18W (CLASE D, 12V/4Ω,THD=10%) hasta92�iciencia (12V/8Ω) modo de ajuste de nivel de operaciónDocument11 pagini7W (CLASE D,7,4 V/4 Ω,THD=10%) 10W (CLASE D,9V/4Ω,THD=10%) 18W (CLASE D, 12V/4Ω,THD=10%) hasta92�iciencia (12V/8Ω) modo de ajuste de nivel de operaciónLuis ContrerasÎncă nu există evaluări
- O3b PPT Itesm 27feb15Document26 paginiO3b PPT Itesm 27feb15Miguel Larumbe BoladoÎncă nu există evaluări
- Catal Feb 2024Document76 paginiCatal Feb 2024segundo zapataÎncă nu există evaluări
- Diodo PinDocument12 paginiDiodo PinPiLiGonzalezÎncă nu există evaluări
- Tema 08 - Comunicaciones SerialesDocument24 paginiTema 08 - Comunicaciones SerialesCarlos E HernandezÎncă nu există evaluări
- Laptop Sistemas UniDocument54 paginiLaptop Sistemas UniFrank AlaveÎncă nu există evaluări
- Denwa Ip-Pbx Series Pro v2 2 (R)Document5 paginiDenwa Ip-Pbx Series Pro v2 2 (R)Magali ChávezÎncă nu există evaluări
- Sistemas Digitales - Semana 16Document14 paginiSistemas Digitales - Semana 16Bryan RamosÎncă nu există evaluări
- Polarizacion VoltajeDocument655 paginiPolarizacion Voltajegarcia100% (2)
- Electronica y Servicio N°76-Reproductores de DVD PDFDocument84 paginiElectronica y Servicio N°76-Reproductores de DVD PDFwilmerk_159990100% (1)
- Manual de Ensamblaje CEPS PDFDocument244 paginiManual de Ensamblaje CEPS PDFKeytel Tarmeño QuispeÎncă nu există evaluări
- Manual de Manejo Del Comag SL 55 Esp CcsDocument55 paginiManual de Manejo Del Comag SL 55 Esp CcsPaco Bernal BernalÎncă nu există evaluări
- Instrucciones PX888Document14 paginiInstrucciones PX888Jm EspeletidasÎncă nu există evaluări
- Diseño de Subestacion de 220-110KVDocument27 paginiDiseño de Subestacion de 220-110KVWilliamÎncă nu există evaluări
- Laboratorio 5Document12 paginiLaboratorio 5bladimir castroÎncă nu există evaluări
- Fuente de AlimentaciónDocument8 paginiFuente de AlimentaciónBrianKlipaukaÎncă nu există evaluări
- DWNLD - 20110511134336 (1) Blusens k20 PDFDocument2 paginiDWNLD - 20110511134336 (1) Blusens k20 PDFJorge LeonÎncă nu există evaluări
- 116679Document225 pagini116679Antonio MartinezÎncă nu există evaluări
- Pulsador de Inyectores PDFDocument4 paginiPulsador de Inyectores PDFJose Eduardo DiazÎncă nu există evaluări
- Notebook Asus g551jk Cn271h 15.6 Led Intel Core I7 4710hq 2Document2 paginiNotebook Asus g551jk Cn271h 15.6 Led Intel Core I7 4710hq 2JimmyCenturionÎncă nu există evaluări
- 3.1 Introducción A La Electronica Industrial Analogica y DigitalDocument3 pagini3.1 Introducción A La Electronica Industrial Analogica y DigitalShawa ZuñigaÎncă nu există evaluări
- UC en TelecomunicacionesDocument16 paginiUC en TelecomunicacionesZet LaimeÎncă nu există evaluări
- MICROCONTROLADORESDocument15 paginiMICROCONTROLADORESAntonio AyalaÎncă nu există evaluări
- Super PosicionDocument2 paginiSuper PosicionGuillermo SkanÎncă nu există evaluări
- Guia y Practica 4734 1Document6 paginiGuia y Practica 4734 1Jorge BalladaresÎncă nu există evaluări
- Unidad 3 Fase 3 Edgar GiraldoDocument10 paginiUnidad 3 Fase 3 Edgar Giraldojulian solaqueÎncă nu există evaluări
- Circuito de Memoria de 4 BitsDocument17 paginiCircuito de Memoria de 4 BitsYuselys Saavedra0% (1)
- Electrónica III - 6EM2 - Practica 1aDocument19 paginiElectrónica III - 6EM2 - Practica 1aEduardoÎncă nu există evaluări
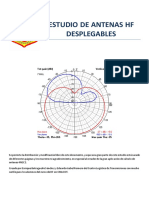
- Antenas HF DesplegablesDocument29 paginiAntenas HF Desplegablesenrique50% (2)