S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- FRS MethodologyDocument2 paginiFRS MethodologyHenry FlorendoÎncă nu există evaluări
- FLCT - Lesson - Module 3Document3 paginiFLCT - Lesson - Module 3Cherry DerramasÎncă nu există evaluări
- Presentation 5Document18 paginiPresentation 5Hazel Halili100% (1)
- FDocument2 paginiFradouane9211Încă nu există evaluări
- WHLP12 Quarter 1Document8 paginiWHLP12 Quarter 1rhaineÎncă nu există evaluări
- Unit 2 SummerDocument3 paginiUnit 2 SummerUmaÎncă nu există evaluări
- TAI PI 500 2018 FormattedDocument54 paginiTAI PI 500 2018 FormattedShinoharaÎncă nu există evaluări
- Naturex Rapport DD BDDocument22 paginiNaturex Rapport DD BDedddson88Încă nu există evaluări
- Fault Codes VauxhallDocument7 paginiFault Codes VauxhallMatt DuffillÎncă nu există evaluări
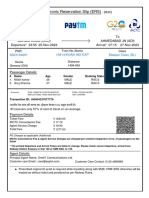
- Train TicketDocument2 paginiTrain TicketSunil kumarÎncă nu există evaluări
- CS310 Dec 2021 - KCCDocument18 paginiCS310 Dec 2021 - KCCLAWRENCE ADU K. DANSOÎncă nu există evaluări
- OSU TemplateDocument193 paginiOSU TemplateDani SardinhaÎncă nu există evaluări
- FMEA ExampleDocument4 paginiFMEA ExampleBALAJIÎncă nu există evaluări
- Merger of ING Vysya Bank Ltd. With Kotak Mahindra Bank Ltd.Document20 paginiMerger of ING Vysya Bank Ltd. With Kotak Mahindra Bank Ltd.Prasad JoshiÎncă nu există evaluări
- 15.1 Illustrative Problems For Ncahfs and DoDocument4 pagini15.1 Illustrative Problems For Ncahfs and DoStefany M. SantosÎncă nu există evaluări
- AutoSPRINK12InstallationWalkthrough PDFDocument2 paginiAutoSPRINK12InstallationWalkthrough PDFHai PhamÎncă nu există evaluări
- Oracle9i Database - Advanced Backup and Recovery Using RMAN - Student GuideDocument328 paginiOracle9i Database - Advanced Backup and Recovery Using RMAN - Student Guideacsabo_14521769Încă nu există evaluări
- FinalannotatedbibDocument20 paginiFinalannotatedbibapi-121966380Încă nu există evaluări
- H170HD, H190HD, H210HD, H230HD, H250HD, H280HD (H007) : 1660374 ©2009 Hyster Company 07/2009Document794 paginiH170HD, H190HD, H210HD, H230HD, H250HD, H280HD (H007) : 1660374 ©2009 Hyster Company 07/2009Manutenção Base Anápolis100% (2)
- Embedded System (9168)Document5 paginiEmbedded System (9168)Victoria FrancoÎncă nu există evaluări
- Design Aeroleaf Wind Turbine PDFDocument98 paginiDesign Aeroleaf Wind Turbine PDFananduÎncă nu există evaluări
- Numerical Analysis: Prof. Dr. Süheyla ÇEHRELİDocument15 paginiNumerical Analysis: Prof. Dr. Süheyla ÇEHRELİEzgi GeyikÎncă nu există evaluări
- 2º Nb-A - Progress Test Review 1-6Document16 pagini2º Nb-A - Progress Test Review 1-6Adrienn JeruskaÎncă nu există evaluări
- PARTES - TurbineMeterManual212FDocument16 paginiPARTES - TurbineMeterManual212FronaldÎncă nu există evaluări
- I&m RF Interference HuntingDocument75 paginiI&m RF Interference HuntingPer KoÎncă nu există evaluări
- Consumer S Behaviour Regarding Cashless Payments During The Covid-19 PandemicDocument13 paginiConsumer S Behaviour Regarding Cashless Payments During The Covid-19 PandemicAesthetica MoonÎncă nu există evaluări
- Openshift LabDocument23 paginiOpenshift LabSriharshi YarraÎncă nu există evaluări
- PH Scale Universal Indicator PH Color Chart Vector Image: Similar ImagesDocument1 paginăPH Scale Universal Indicator PH Color Chart Vector Image: Similar Imagesmyzna_husna_90788547Încă nu există evaluări
- CIR v. MarubeniDocument9 paginiCIR v. MarubeniMariano RentomesÎncă nu există evaluări
- Cognitive Dimension of EducationDocument30 paginiCognitive Dimension of Educationjulius ochiengÎncă nu există evaluări