S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Giuliani Letter To Sen. GrahamDocument4 paginiGiuliani Letter To Sen. GrahamFox News83% (12)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- 1.functional Specification PTP With EDIDocument36 pagini1.functional Specification PTP With EDIAnil Kumar100% (4)
- Google Earth User GuideDocument131 paginiGoogle Earth User GuideManan AroraÎncă nu există evaluări
- Mcqs in Wills and SuccessionDocument14 paginiMcqs in Wills and Successionjudy andrade100% (1)
- SOP No. 6Document22 paginiSOP No. 6Eli CohenÎncă nu există evaluări
- Common OPCRF Contents For 2021 2022 FINALE 2Document21 paginiCommon OPCRF Contents For 2021 2022 FINALE 2JENNIFER FONTANILLA100% (30)
- BAE Automated SystemDocument29 paginiBAE Automated Systemriffatali15222100% (1)
- ASM INTERNATIONAL Carburizing Microstructures and Properties by Geoffrey ParrishDocument222 paginiASM INTERNATIONAL Carburizing Microstructures and Properties by Geoffrey ParrishAdheith South NgalamÎncă nu există evaluări
- Municipality of Boliney: Republic of The Philippines Cordillera Administrative Region Province of AbraDocument7 paginiMunicipality of Boliney: Republic of The Philippines Cordillera Administrative Region Province of AbraErnest Aton100% (1)
- Job Analysis & HR PlanningDocument31 paginiJob Analysis & HR PlanningPradeep100% (11)
- Business Plan GROUP 10Document35 paginiBusiness Plan GROUP 10Sofia GarciaÎncă nu există evaluări
- Critical Success Factors For Positioning Australian Business Talent in The Global Knowledge Economy: A Current Research AgendaDocument18 paginiCritical Success Factors For Positioning Australian Business Talent in The Global Knowledge Economy: A Current Research AgendaVictor EtseÎncă nu există evaluări
- Showcase Application FormDocument1 paginăShowcase Application FormVictor EtseÎncă nu există evaluări
- Weekly Report of Ghana Vodafone BSS 2013 UG Project (20131012-20131018)Document64 paginiWeekly Report of Ghana Vodafone BSS 2013 UG Project (20131012-20131018)Victor EtseÎncă nu există evaluări
- RFCDocument1 paginăRFCVictor EtseÎncă nu există evaluări
- Niti Wire FatigueDocument12 paginiNiti Wire FatigueVictor EtseÎncă nu există evaluări
- Lte TutorialDocument82 paginiLte TutorialGuru Guha Venkatasubramanian100% (1)
- SSV DTDocument18 paginiSSV DTVictor EtseÎncă nu există evaluări
- AyarigaDocument1 paginăAyarigaVictor EtseÎncă nu există evaluări
- CN: 4494185271 Sister Naana 1840 $50Document1 paginăCN: 4494185271 Sister Naana 1840 $50Victor EtseÎncă nu există evaluări
- Fuel Log (Tom Card 27600)Document87 paginiFuel Log (Tom Card 27600)Victor EtseÎncă nu există evaluări
- Shell ApplicationDocument1 paginăShell ApplicationVictor EtseÎncă nu există evaluări
- SSV StatsDocument18 paginiSSV StatsVictor EtseÎncă nu există evaluări
- Learning StuffDocument4 paginiLearning StuffVictor EtseÎncă nu există evaluări
- WCDMA BTS3900A Hardware StructureDocument69 paginiWCDMA BTS3900A Hardware Structureleosedf100% (2)
- SSV StatsDocument18 paginiSSV StatsVictor EtseÎncă nu există evaluări
- AyarigaDocument1 paginăAyarigaVictor EtseÎncă nu există evaluări
- AyarigaDocument1 paginăAyarigaVictor EtseÎncă nu există evaluări
- New Computer Manual: (Step1: Join Domain)Document1 paginăNew Computer Manual: (Step1: Join Domain)Victor EtseÎncă nu există evaluări
- AyarigaDocument1 paginăAyarigaVictor EtseÎncă nu există evaluări
- GPRS FlowDocument7 paginiGPRS FlowVictor EtseÎncă nu există evaluări
- Introduction To EXCEL Major Functions and Operations-20031030-B-1.0Document24 paginiIntroduction To EXCEL Major Functions and Operations-20031030-B-1.0Victor EtseÎncă nu există evaluări
- Cara Membuat Motivation LetterDocument5 paginiCara Membuat Motivation LetterBayu Ade Krisna0% (1)
- Statable 1Document350 paginiStatable 1Shelly SantiagoÎncă nu există evaluări
- COVID Immunization Record Correction RequestDocument2 paginiCOVID Immunization Record Correction RequestNBC 10 WJARÎncă nu există evaluări
- Harga H2H Pula-Paket Data - Saldo EWallet v31012022Document10 paginiHarga H2H Pula-Paket Data - Saldo EWallet v31012022lala cemiÎncă nu există evaluări
- INTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Document7 paginiINTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Shashank DurgeÎncă nu există evaluări
- Ap06 - Ev04 Taller en Idioma Inglés Sobre Sistema de DistribuciónDocument9 paginiAp06 - Ev04 Taller en Idioma Inglés Sobre Sistema de DistribuciónJenny Lozano Charry50% (2)
- IBMC Competition Booklet 2013Document40 paginiIBMC Competition Booklet 2013Rollins Center at BYUÎncă nu există evaluări
- Bode PlotsDocument6 paginiBode PlotshasanozdÎncă nu există evaluări
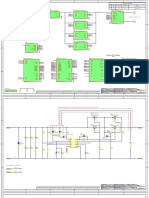
- Scheme Bidirectional DC-DC ConverterDocument16 paginiScheme Bidirectional DC-DC ConverterNguyễn Quang KhoaÎncă nu există evaluări
- Kuper ManualDocument335 paginiKuper Manualdonkey slap100% (1)
- Resources and Courses: Moocs (Massive Open Online Courses)Document8 paginiResources and Courses: Moocs (Massive Open Online Courses)Jump SkillÎncă nu există evaluări
- Seminar Report of Automatic Street Light: Presented byDocument14 paginiSeminar Report of Automatic Street Light: Presented byTeri Maa Ki100% (2)
- Actus Reus and Mens Rea New MergedDocument4 paginiActus Reus and Mens Rea New MergedHoorÎncă nu există evaluări
- IIBA Academic Membership Info-Sheet 2013Document1 paginăIIBA Academic Membership Info-Sheet 2013civanusÎncă nu există evaluări
- Mathematical Geophysics: Class One Amin KhalilDocument13 paginiMathematical Geophysics: Class One Amin KhalilAmin KhalilÎncă nu există evaluări
- ODF-2 - Learning MaterialDocument24 paginiODF-2 - Learning MateriallevychafsÎncă nu există evaluări
- Relay Interface ModulesDocument2 paginiRelay Interface Modulesmahdi aghamohamadiÎncă nu există evaluări
- Medical Devices RegulationsDocument59 paginiMedical Devices RegulationsPablo CzÎncă nu există evaluări
- S 101-01 - PDF - User Interface - Computer MonitorDocument130 paginiS 101-01 - PDF - User Interface - Computer Monitormborghesi1Încă nu există evaluări
- China Ve01 With Tda93xx An17821 Stv9302a La78040 Ka5q0765-SmDocument40 paginiChina Ve01 With Tda93xx An17821 Stv9302a La78040 Ka5q0765-SmAmadou Fall100% (1)
- AN610 - Using 24lc21Document9 paginiAN610 - Using 24lc21aurelioewane2022Încă nu există evaluări
- POM 3.2 Marketing Management IIDocument37 paginiPOM 3.2 Marketing Management IIDhiraj SharmaÎncă nu există evaluări