S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Sem 20180426 Ats Iem FL1Document2 paginiSem 20180426 Ats Iem FL1Choco Mila BeidinÎncă nu există evaluări
- 29 TA4 FlexibleEarthDocument1 pagină29 TA4 FlexibleEarthvinoth sekarÎncă nu există evaluări
- ThermocoupleDocument11 paginiThermocouplejithabhasuÎncă nu există evaluări
- Common Base ConfigurationDocument7 paginiCommon Base ConfigurationVickeyÎncă nu există evaluări
- Fundamentals of Electroanalytical ChemistryDocument19 paginiFundamentals of Electroanalytical ChemistryAmida OaxacaÎncă nu există evaluări
- PreviewpdfDocument90 paginiPreviewpdfnekosnow rosecatÎncă nu există evaluări
- Navistar Electricidad BasicaDocument128 paginiNavistar Electricidad BasicaHenry MorenoÎncă nu există evaluări
- Passive and Active Battery Balancing Comparison Based On MATLAB SimulationDocument7 paginiPassive and Active Battery Balancing Comparison Based On MATLAB SimulationNhật NguyễnÎncă nu există evaluări
- Bcr3Am: Mitsubishi Semiconductor TriacDocument5 paginiBcr3Am: Mitsubishi Semiconductor TriacbuayamyÎncă nu există evaluări
- Advanced Manufacturing Technology (PC-ME701)Document23 paginiAdvanced Manufacturing Technology (PC-ME701)Deepak KumarÎncă nu există evaluări
- CD4016Document8 paginiCD4016api-3708997100% (1)
- A Low-Cost Impedance Meter Using a PC Sound CardDocument4 paginiA Low-Cost Impedance Meter Using a PC Sound Carddavorko_tÎncă nu există evaluări
- Aircraft GFI Relay OperationDocument3 paginiAircraft GFI Relay Operationraghav787Încă nu există evaluări
- Semiconductors Notes PDFDocument20 paginiSemiconductors Notes PDFVishalÎncă nu există evaluări
- Technology and Livelihood Education: Electrical Installation and MaintenanceDocument11 paginiTechnology and Livelihood Education: Electrical Installation and MaintenanceAV Montes100% (1)
- Eh600 A Series 2Document92 paginiEh600 A Series 2Nguyễn Đình Bảo KhangÎncă nu există evaluări
- Iooll: Multi-Level Conversion: A N D Voltage-Source Inverters High Voltage ChoppersDocument7 paginiIooll: Multi-Level Conversion: A N D Voltage-Source Inverters High Voltage ChoppersВладимир ПоповÎncă nu există evaluări
- LSUBL6432ADocument4 paginiLSUBL6432ATotoxaHCÎncă nu există evaluări
- EMT - Assingment (Electromagnatic Floater)Document10 paginiEMT - Assingment (Electromagnatic Floater)Iqbal Haziq AzmiÎncă nu există evaluări
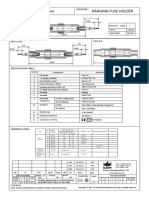
- Hanging fuse holder product detailsDocument1 paginăHanging fuse holder product detailsbemlÎncă nu există evaluări
- Technical Seminar PPT TemplateDocument16 paginiTechnical Seminar PPT TemplateDamineni PoojithaÎncă nu există evaluări
- Joffrey Ramos Galanta: Marine Electrician/General ElectricianDocument4 paginiJoffrey Ramos Galanta: Marine Electrician/General ElectricianJoffrey GalantaÎncă nu există evaluări
- Tine: Trdsforner Naaibun: Hourard Kva, LvaDocument12 paginiTine: Trdsforner Naaibun: Hourard Kva, LvaRekha NairÎncă nu există evaluări
- Equipment Wire Data SheetDocument3 paginiEquipment Wire Data Sheetamro emadÎncă nu există evaluări
- GJSET - Paper 00078 PDFDocument7 paginiGJSET - Paper 00078 PDFdennypolariszÎncă nu există evaluări
- Electronics For IT Ch2 20212 P3Document39 paginiElectronics For IT Ch2 20212 P3Thành Bùi VănÎncă nu există evaluări
- Mode of Arc Extinction Mode of Arc Extinction: High Resistance Arc Interruption High Resistance Arc InterruptionDocument9 paginiMode of Arc Extinction Mode of Arc Extinction: High Resistance Arc Interruption High Resistance Arc Interruptionwan anisÎncă nu există evaluări
- Sensors and Actuators SyllabusDocument14 paginiSensors and Actuators SyllabusKeerthan R VarmaÎncă nu există evaluări
- HT-LT Stay InsulatorDocument6 paginiHT-LT Stay InsulatorsaratÎncă nu există evaluări
- Lab4 Thermal Relay-EngDocument4 paginiLab4 Thermal Relay-EngRazvanTomaÎncă nu există evaluări