S-ar putea să vă placă și
- Guía Bootcamp Sesión 3Document21 paginiGuía Bootcamp Sesión 3Sebastian GomezÎncă nu există evaluări
- Tarjeta PersonaDocument15 paginiTarjeta PersonaSebastian GomezÎncă nu există evaluări
- Llave InglesaDocument3 paginiLlave InglesaSebastian GomezÎncă nu există evaluări
- Formato Hoja de VidaDocument4 paginiFormato Hoja de VidaSebastian GomezÎncă nu există evaluări
- TOMO3 - Metalurgia AplicadaDocument185 paginiTOMO3 - Metalurgia Aplicadautraj100% (9)
- Titulo ProyectoDocument8 paginiTitulo ProyectoSebastian GomezÎncă nu există evaluări
- Primer Corte. Conceptos Fundamentales de Un Proceso IndustrialDocument3 paginiPrimer Corte. Conceptos Fundamentales de Un Proceso IndustrialDaniel Amaya100% (1)
- Rita Kotov. Jorge Ivan Vergara. (1995) - La Identidad Mapuche en La Perspectiva de Los Intelectua..Document11 paginiRita Kotov. Jorge Ivan Vergara. (1995) - La Identidad Mapuche en La Perspectiva de Los Intelectua..Jorge Iván VergaraÎncă nu există evaluări
- Marco Teorico TV BasuraDocument4 paginiMarco Teorico TV BasuraRonnyRodas100% (1)
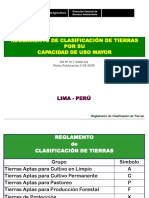
- Reglamento de Capacidad de Uso Mayor CUM PerúDocument156 paginiReglamento de Capacidad de Uso Mayor CUM PerúErnesto DarwinÎncă nu există evaluări
- Ancho de BusDocument7 paginiAncho de BusLuis De Jesús Franco Galvan100% (1)
- Proceso de DesalojoDocument25 paginiProceso de DesalojoOdaliz Acharte67% (3)
- Padilla Wilson 06 - 12 - 2010 - Deber 4Document2 paginiPadilla Wilson 06 - 12 - 2010 - Deber 4Cristhian GutierrezÎncă nu există evaluări
- Infografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker AzulDocument2 paginiInfografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker AzulLeonel GarzaÎncă nu există evaluări
- Actividad 9 para Los Alumnos de Estadistica Aplicada 10 A Probabilidad, Permutaciones y CombinacionesDocument2 paginiActividad 9 para Los Alumnos de Estadistica Aplicada 10 A Probabilidad, Permutaciones y Combinacionesmarco_valle_30Încă nu există evaluări
- 16PFDocument36 pagini16PFAngela Maria RodriguezÎncă nu există evaluări
- Practico 1 ChomskyDocument2 paginiPractico 1 ChomskyNaiCasazÎncă nu există evaluări
- Desarrollo Integral y Sustentable de Lagunas Costeras MexicanasDocument25 paginiDesarrollo Integral y Sustentable de Lagunas Costeras MexicanasDennis QuispeÎncă nu există evaluări
- Cuentos de Abuela Coneja: Guadalupe EspejoDocument5 paginiCuentos de Abuela Coneja: Guadalupe EspejoAndres RestrepoÎncă nu există evaluări
- Unidad 3 Tarea 3 Metales y MetalurgiaDocument12 paginiUnidad 3 Tarea 3 Metales y MetalurgiaNiyeredRinconSastoqueÎncă nu există evaluări
- Bases Lpn-043-2019 Utiles Escolares SepeDocument28 paginiBases Lpn-043-2019 Utiles Escolares SepeReynaldo Meza VillarrealÎncă nu există evaluări
- Mapa Conceptual Redes 1Document3 paginiMapa Conceptual Redes 1ErikaPlusÎncă nu există evaluări
- TALLER 1 Ley 594 de 2000 ACDocument3 paginiTALLER 1 Ley 594 de 2000 ACfelipe zamudioÎncă nu există evaluări
- Cachimbos M4Document13 paginiCachimbos M4Sicologo CimeÎncă nu există evaluări
- Plan - 10067 - Ordenanza #290 - 2008Document13 paginiPlan - 10067 - Ordenanza #290 - 2008Gi VilaÎncă nu există evaluări
- Laboratorio 2 Grupo 2 MecanicaDocument23 paginiLaboratorio 2 Grupo 2 MecanicaLuzbelia ShanileyÎncă nu există evaluări
- Capitulo de SanjurjoDocument16 paginiCapitulo de Sanjurjoprofesoradosunq76% (21)
- Tendinitis RotulianaDocument3 paginiTendinitis RotulianaUri Claro100% (1)
- Manometro 0 - 5000 Psi SSI-505062Document4 paginiManometro 0 - 5000 Psi SSI-505062TatianaÎncă nu există evaluări
- Introducción A Power CenterDocument83 paginiIntroducción A Power Centerguerramag1100% (2)
- Actores de Contaminacion en UcayaliDocument9 paginiActores de Contaminacion en UcayaliSayan Garcia RuizÎncă nu există evaluări
- Practica Cristalizacion 1Document12 paginiPractica Cristalizacion 1Fernando GarciaÎncă nu există evaluări
- Curva de MagnetizacionDocument8 paginiCurva de MagnetizacionCarlos Francisco Flores RamosÎncă nu există evaluări
- Libro El Mejor Año de Tu VidaDocument7 paginiLibro El Mejor Año de Tu VidaJose Torres Vargas0% (1)
- Informacion Sobre La UniversidadDocument3 paginiInformacion Sobre La UniversidadJosangelis bermudezÎncă nu există evaluări
- MDocument209 paginiMJavier HernándezÎncă nu există evaluări
- Influencia. La psicología de la persuasiónDe la EverandInfluencia. La psicología de la persuasiónEvaluare: 4.5 din 5 stele4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe la EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressEvaluare: 5 din 5 stele5/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe la Everand7 tendencias digitales que cambiarán el mundoEvaluare: 4.5 din 5 stele4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe la EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroEvaluare: 4 din 5 stele4/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe la EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosEvaluare: 4 din 5 stele4/5 (16)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe la EverandCultura y clima: fundamentos para el cambio en la organizaciónÎncă nu există evaluări
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De la EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Evaluare: 4 din 5 stele4/5 (51)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe la EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaEvaluare: 4.5 din 5 stele4.5/5 (117)
- Guía para la aplicación de ISO 9001 2015De la EverandGuía para la aplicación de ISO 9001 2015Evaluare: 4 din 5 stele4/5 (1)
- Guía de aplicacion de la ISO 9001:2015De la EverandGuía de aplicacion de la ISO 9001:2015Evaluare: 5 din 5 stele5/5 (3)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaDe la EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezEvaluare: 4 din 5 stele4/5 (3)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe la EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másEvaluare: 2.5 din 5 stele2.5/5 (3)
- Electrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESDe la EverandElectrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESEvaluare: 5 din 5 stele5/5 (16)