S-ar putea să vă placă și
- 2-11 Subsea Drilling-Well Ops-Completions PaperDocument45 pagini2-11 Subsea Drilling-Well Ops-Completions PaperRasheed YusufÎncă nu există evaluări
- Directional Drilling MathDocument18 paginiDirectional Drilling MathSazzadul HossainÎncă nu există evaluări
- DRAFT - Requirements For Pressure TestingDocument3 paginiDRAFT - Requirements For Pressure TestingAdhie WaelacxhÎncă nu există evaluări
- Dog Leg SeverityDocument7 paginiDog Leg Severitymadonnite3781Încă nu există evaluări
- Adjustable Motor PDFDocument9 paginiAdjustable Motor PDFsaeed65Încă nu există evaluări
- Offshore Oil and Gas Industry - Abbreviations and AcronymsDocument40 paginiOffshore Oil and Gas Industry - Abbreviations and Acronymsmadonnite3781Încă nu există evaluări
- Character QuestionsDocument3 paginiCharacter QuestionsAaron FarmerÎncă nu există evaluări
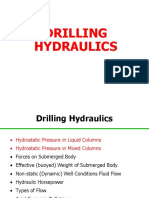
- DRILLING HYDRAULICS (Introduction)Document27 paginiDRILLING HYDRAULICS (Introduction)Yusuf Maringga100% (1)
- Magnetic and Fravity ToolfaceDocument17 paginiMagnetic and Fravity Toolfacemadonnite3781100% (1)
- What Is Measuring While Drilling (MWD) ?: Source: Accu Tech The MWD CompanyDocument3 paginiWhat Is Measuring While Drilling (MWD) ?: Source: Accu Tech The MWD CompanyAnonymous AkV8maWxGN0% (1)
- Workover OperationsDocument13 paginiWorkover OperationsnarendrajaredaÎncă nu există evaluări
- Drilling Rigs HNBVDocument58 paginiDrilling Rigs HNBVMohamed Abdallahi100% (2)
- 82 - Engineering Mechanics Refresher SetDocument6 pagini82 - Engineering Mechanics Refresher Setdevilene nayazakoÎncă nu există evaluări
- Drilling TechniquesDocument9 paginiDrilling TechniquesHafiz DaudÎncă nu există evaluări
- Evolution of Directional Drilling Since 1900Document7 paginiEvolution of Directional Drilling Since 1900Rafique ArisarÎncă nu există evaluări
- Offshore Oil and ProdDocument101 paginiOffshore Oil and Prodmadonnite3781Încă nu există evaluări
- Directional Drilling 2011 .Last VersionDocument56 paginiDirectional Drilling 2011 .Last Versionmahdi_esm0% (1)
- Directional DrillingDocument32 paginiDirectional DrillingDante SchneiderÎncă nu există evaluări
- Introduction of Drilling Rig in Oil & Gas Indutry - WikipediaDocument12 paginiIntroduction of Drilling Rig in Oil & Gas Indutry - WikipediaFaiz AhmadÎncă nu există evaluări
- Summative Test 3.1 Math 10Document2 paginiSummative Test 3.1 Math 10Christian DecenaÎncă nu există evaluări
- Lecture 3 - Drilling Methods and Process-1Document34 paginiLecture 3 - Drilling Methods and Process-1hasan sabah100% (2)
- Reservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsDe la EverandReservoir Engineering in Modern Oilfields: Vertical, Deviated, Horizontal and Multilateral Well SystemsÎncă nu există evaluări
- 5 - Volumes & MaaspDocument111 pagini5 - Volumes & Maaspsouthernor100% (2)
- Drilling EngineeringDocument14 paginiDrilling EngineeringApostolos AvraamidesÎncă nu există evaluări
- Sec6 Subsea Blowout Preventers PDFDocument22 paginiSec6 Subsea Blowout Preventers PDFMaría MarquinaÎncă nu există evaluări
- MPD Libra Project: Advance Training SeccionDocument187 paginiMPD Libra Project: Advance Training SeccionGabrielÎncă nu există evaluări
- Logging While DrillingDocument8 paginiLogging While Drillingmay16forhenry4906100% (2)
- Bit SelectionDocument83 paginiBit SelectionEugene TanÎncă nu există evaluări
- Fundamentals of Petroleum Engineering WELL COMPLETION AND STIMULATION Mohd Fauzi Hamid Wan Rosli Wan Sulaiman Department of Petroleum Engineering Faculty of Petroleum & Renewable EnginDocument29 paginiFundamentals of Petroleum Engineering WELL COMPLETION AND STIMULATION Mohd Fauzi Hamid Wan Rosli Wan Sulaiman Department of Petroleum Engineering Faculty of Petroleum & Renewable Enginqazim786Încă nu există evaluări
- Free Point Indicator PDFDocument6 paginiFree Point Indicator PDFDedipya100% (1)
- Fundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersDe la EverandFundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersÎncă nu există evaluări
- Directional DrillingDocument27 paginiDirectional Drillingrarahaha100% (1)
- Drilling Process Info.Document4 paginiDrilling Process Info.Sahil VoraÎncă nu există evaluări
- Well Access Landing StringDocument8 paginiWell Access Landing Stringmadonnite3781Încă nu există evaluări
- Well Access Landing StringDocument8 paginiWell Access Landing Stringmadonnite3781Încă nu există evaluări
- 2 - Directional Well DrillingDocument105 pagini2 - Directional Well DrillingAli AbdullahÎncă nu există evaluări
- Formulas and Calculations for Drilling OperationsDe la EverandFormulas and Calculations for Drilling OperationsÎncă nu există evaluări
- Working Guide to Drilling Equipment and OperationsDe la EverandWorking Guide to Drilling Equipment and OperationsEvaluare: 5 din 5 stele5/5 (9)
- ELSA HP High Pressure Subsea Safety SystemsDocument5 paginiELSA HP High Pressure Subsea Safety Systemsmadonnite3781Încă nu există evaluări
- Lecture 13 - Drilling HydraulicsDocument65 paginiLecture 13 - Drilling HydraulicsMaria Luisa CepedaÎncă nu există evaluări
- Planmeca Promax 3D Max CBVT Product PresentationDocument36 paginiPlanmeca Promax 3D Max CBVT Product PresentationAD TwentyOne DentalÎncă nu există evaluări
- Shale Shaker and Drilling Fluids Systems:: Techniques and Technology for Improving Solids Control ManagementDe la EverandShale Shaker and Drilling Fluids Systems:: Techniques and Technology for Improving Solids Control ManagementEvaluare: 4.5 din 5 stele4.5/5 (2)
- Drill Bit Selection and Evaluation ParsselDocument10 paginiDrill Bit Selection and Evaluation ParsselKaveh Bahiraee100% (1)
- Reduce Torsional Vibration and Improve Drilling Operations: Jerome Rajnauth, PHDDocument15 paginiReduce Torsional Vibration and Improve Drilling Operations: Jerome Rajnauth, PHDAnonymous DDqgH1Y2MKÎncă nu există evaluări
- Stuck Pipe PreventionDocument64 paginiStuck Pipe PreventionmmbatainehÎncă nu există evaluări
- Subsea Xmas TreeDocument8 paginiSubsea Xmas Treemadonnite3781100% (1)
- Wave Propagation in Drilling, Well Logging and Reservoir ApplicationsDe la EverandWave Propagation in Drilling, Well Logging and Reservoir ApplicationsÎncă nu există evaluări
- Drilling Power SystemDocument22 paginiDrilling Power Systemavula43100% (1)
- ITIL Change ManagementDocument4 paginiITIL Change ManagementShanKumarÎncă nu există evaluări
- Respons 910 Analyzer: Operator's ManualDocument246 paginiRespons 910 Analyzer: Operator's ManualUmashankar LoganathanÎncă nu există evaluări
- Dictionary of Oil Industry TerminologyDocument79 paginiDictionary of Oil Industry Terminologyniksharris100% (22)
- Mwd-Manual PDFDocument151 paginiMwd-Manual PDFmanu pratap singhÎncă nu există evaluări
- Voice Alarm - PAVA - Design Guide PDFDocument27 paginiVoice Alarm - PAVA - Design Guide PDFmadonnite3781Încă nu există evaluări
- Drilling ProblemsDocument38 paginiDrilling Problemskrishnsgk100% (1)
- Title DefenseDocument3 paginiTitle DefenseLiezl Sabado100% (1)
- System Safety Engineering An Overview For Engineers and ManagersDocument42 paginiSystem Safety Engineering An Overview For Engineers and Managersmadonnite3781Încă nu există evaluări
- Mars Climate Orbiter ReportDocument27 paginiMars Climate Orbiter Reportbiguelo100% (1)
- Completion Workover Riser SystemDocument5 paginiCompletion Workover Riser Systemmadonnite3781100% (1)
- Summer Internship ON: Basics of Well Logging, Well Log Operations & Interpretation-Ongc Mehsana AssetDocument38 paginiSummer Internship ON: Basics of Well Logging, Well Log Operations & Interpretation-Ongc Mehsana AssetYaashpal Malik50% (2)
- Measurement While Drilling: Signal Analysis, Optimization and DesignDe la EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignÎncă nu există evaluări
- Introduction To Subsea Production SystemDocument42 paginiIntroduction To Subsea Production Systemmadonnite3781Încă nu există evaluări
- Dependency Form PDFDocument5 paginiDependency Form PDFVivek VenugopalÎncă nu există evaluări
- Rotary Steerable SystemDocument29 paginiRotary Steerable Systemakshitppe11100% (2)
- What Is Subsea - Standards and RulesDocument17 paginiWhat Is Subsea - Standards and Rulesmadonnite3781Încă nu există evaluări
- GYRODocument5 paginiGYROaboeldahab2010Încă nu există evaluări
- Well Control - Combined Stripping and Volumetric MethodDocument3 paginiWell Control - Combined Stripping and Volumetric MethodAbdul Hameed Omar100% (1)
- Dayly Mud Logging Report PDFDocument1 paginăDayly Mud Logging Report PDFRobert100% (1)
- MWD BosDocument15 paginiMWD Bosarifin ubaidÎncă nu există evaluări
- Cost Estimate AFE ReportDocument3 paginiCost Estimate AFE ReportAmirhosseinÎncă nu există evaluări
- ToolfaceDocument15 paginiToolfaceAdin PraviMoški PartAdis0% (1)
- Baker Hughes 43018 Axcelerate in Gom CHDocument1 paginăBaker Hughes 43018 Axcelerate in Gom CHArumugam RajendranÎncă nu există evaluări
- SPE-14765-MS-Applications of A BHA Analysis Program in Directional DrillingDocument10 paginiSPE-14765-MS-Applications of A BHA Analysis Program in Directional Drillingsaeed65Încă nu există evaluări
- WellSharp Formula SI UnitsDocument4 paginiWellSharp Formula SI UnitstanolucascribdÎncă nu există evaluări
- CompassDocument4 paginiCompassEnny RachelÎncă nu există evaluări
- 2 MWD Failure Troubleshooting Procedures Complete PDFDocument13 pagini2 MWD Failure Troubleshooting Procedures Complete PDFfedericoÎncă nu există evaluări
- Deflection Tools and TechniqueDocument28 paginiDeflection Tools and TechniqueMrSebolliniÎncă nu există evaluări
- 4 75in OTK 100278Document2 pagini4 75in OTK 100278Qiang ZhangÎncă nu există evaluări
- Surgi-Jet Perforating: Well InterventionDocument21 paginiSurgi-Jet Perforating: Well Interventiongeo84100% (1)
- Draw WorkDocument4 paginiDraw WorkfahroerÎncă nu există evaluări
- Dept. of EEE Two Mark Question Answer: EC1255-Measurements and InstrumentationDocument8 paginiDept. of EEE Two Mark Question Answer: EC1255-Measurements and InstrumentationRajesh NelavalaÎncă nu există evaluări
- Lesson Vibration and Noise MeasurementDocument56 paginiLesson Vibration and Noise Measurementmister pogiÎncă nu există evaluări
- Car Share Permit Application FEB 2016Document4 paginiCar Share Permit Application FEB 2016madonnite3781Încă nu există evaluări
- 2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredDocument7 pagini2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredAbhijeet KulkarniÎncă nu există evaluări
- High Speed Rail Seminar 13 Apr 2011 MinutesDocument10 paginiHigh Speed Rail Seminar 13 Apr 2011 Minutesmadonnite3781Încă nu există evaluări
- Electrical Power HintsDocument2 paginiElectrical Power Hintsmadonnite3781Încă nu există evaluări
- Railway HazardsDocument3 paginiRailway Hazardsmadonnite3781Încă nu există evaluări
- Release 65511Document1 paginăRelease 65511madonnite3781Încă nu există evaluări
- Guidance Note - Operation and Management of Voice Recording in TOC Operations Control CentresDocument16 paginiGuidance Note - Operation and Management of Voice Recording in TOC Operations Control Centresmadonnite3781Încă nu există evaluări
- GMRDownload 146 SmallDocument12 paginiGMRDownload 146 Smallmadonnite3781Încă nu există evaluări
- Inverse Gas Life Using Dual Flow SSV - North SeaDocument17 paginiInverse Gas Life Using Dual Flow SSV - North Seamadonnite3781Încă nu există evaluări
- RFCellularexposure PDFDocument24 paginiRFCellularexposure PDFmadonnite3781Încă nu există evaluări
- Early Reservoir Appraisal Utilizing A Well Testing SystemDocument69 paginiEarly Reservoir Appraisal Utilizing A Well Testing Systemmadonnite3781100% (1)
- Deepwater Completions Landing StringDocument8 paginiDeepwater Completions Landing Stringmadonnite3781Încă nu există evaluări
- Well InterventionDocument54 paginiWell InterventionVignesh KuppurajÎncă nu există evaluări
- Technical Safety of Subsea Workover Systems - LRDocument11 paginiTechnical Safety of Subsea Workover Systems - LRmadonnite3781Încă nu există evaluări
- Casing Design User ManualDocument29 paginiCasing Design User Manualmadonnite3781Încă nu există evaluări
- Arguments and FallaciesDocument18 paginiArguments and FallaciesSarah Mae Peñaflor Baldon-IlaganÎncă nu există evaluări
- S1 Mock 2Document13 paginiS1 Mock 2Abdulrahman HatemÎncă nu există evaluări
- Vichinsky Et Al.2019Document11 paginiVichinsky Et Al.2019Kuliah Semester 4Încă nu există evaluări
- Training Guide: Administering Windows Server 2012Document33 paginiTraining Guide: Administering Windows Server 2012sabastianÎncă nu există evaluări
- Existing VendorsDocument1 paginăExisting VendorsSuperintending EngineerÎncă nu există evaluări
- One Page Mistake ProofingDocument1 paginăOne Page Mistake Proofingtuan mai vanÎncă nu există evaluări
- NCLFNP - Mr. Robert McClelland CaseDocument4 paginiNCLFNP - Mr. Robert McClelland CaseAiresh Lamao50% (2)
- Vedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyDocument1 paginăVedic Astrology - Marriage Star Matching Compatibility For Pooraadam Girl and Aayilyam BoyRam GopalÎncă nu există evaluări
- 2020-21 Series Test 1 QPDocument1 pagină2020-21 Series Test 1 QPred18ggmuÎncă nu există evaluări
- Cn101386595-Chemical Synthesis Method of 10-Methoxyl-5H-Dibenz (B, F) AzapineDocument4 paginiCn101386595-Chemical Synthesis Method of 10-Methoxyl-5H-Dibenz (B, F) AzapineDipti DodiyaÎncă nu există evaluări
- 3.Space-Activity BookDocument21 pagini3.Space-Activity BookRania FarranÎncă nu există evaluări
- Implications of PropTechDocument107 paginiImplications of PropTechAnsar FarooqiÎncă nu există evaluări
- The Law of CosinesDocument4 paginiThe Law of Cosinesapi-213604106Încă nu există evaluări
- Art & Science: Meeting The Needs of Patients' Families in Intensive Care UnitsDocument8 paginiArt & Science: Meeting The Needs of Patients' Families in Intensive Care UnitsRiaÎncă nu există evaluări
- Simulation and Analysis of 10 Gbps APD Receiver With Dispersion CompensationDocument5 paginiSimulation and Analysis of 10 Gbps APD Receiver With Dispersion CompensationMohd NafishÎncă nu există evaluări
- APP PinAAcle 900 Elemental Analysis of Beer by FAAS 012049 01Document3 paginiAPP PinAAcle 900 Elemental Analysis of Beer by FAAS 012049 01strubingeraÎncă nu există evaluări
- Collimation of Binoculars With A LampDocument33 paginiCollimation of Binoculars With A LampchristianÎncă nu există evaluări
- HYSYS Basis PDFDocument306 paginiHYSYS Basis PDFsalman hussainÎncă nu există evaluări
- Ruskin As A Social Reformer - Docx ADocument2 paginiRuskin As A Social Reformer - Docx AAtif Hayat50% (2)
- Full Cutoff LightingDocument3 paginiFull Cutoff LightingFatma IbrahimÎncă nu există evaluări
- PDF EnglishDocument36 paginiPDF EnglishSanti CheewabantherngÎncă nu există evaluări
- Pure Theory of Law Hans Kelson-Ltp..Document45 paginiPure Theory of Law Hans Kelson-Ltp..ShabnamÎncă nu există evaluări
- (Type The Documen T Title) : (Year)Document18 pagini(Type The Documen T Title) : (Year)goodluck788Încă nu există evaluări