S-ar putea să vă placă și
- Puntos InaccesiblesDocument25 paginiPuntos Inaccesiblessaul nuñezÎncă nu există evaluări
- Topografía y Obras Viales - Unidad 5Document16 paginiTopografía y Obras Viales - Unidad 5Osmary RuizÎncă nu există evaluări
- InformeDocument15 paginiInformeAlonso Lopez MendozaÎncă nu există evaluări
- Memoria Topografica Local Municipal - Ips - ModificadoDocument10 paginiMemoria Topografica Local Municipal - Ips - ModificadopercyÎncă nu există evaluări
- Levantamiento de Poligonal CerradaDocument12 paginiLevantamiento de Poligonal CerradaFrankJhuliñoÎncă nu există evaluări
- 686908876.topografía y Obras Viales - Unidad 5Document16 pagini686908876.topografía y Obras Viales - Unidad 5Rosa Jimena Milla EcheverríaÎncă nu există evaluări
- Levantamiento Curvas de NivelDocument5 paginiLevantamiento Curvas de NivelJenifer Patricia Mattos CampoÎncă nu există evaluări
- Capitulo IDocument14 paginiCapitulo IPATY APÎncă nu există evaluări
- LEVANTAMIENTO TOPOGRAFICO POR EL METODO DE TRIANGULACION-alejis - Docx2Document18 paginiLEVANTAMIENTO TOPOGRAFICO POR EL METODO DE TRIANGULACION-alejis - Docx2alejandra quijanoÎncă nu există evaluări
- Memoria ArquitecturaDocument15 paginiMemoria ArquitecturaJorge Meregildo HerreraÎncă nu există evaluări
- Parcial TB 2Document17 paginiParcial TB 2Roberto Oblitas PeralesÎncă nu există evaluări
- Tema 4 PlanimetríaDocument20 paginiTema 4 PlanimetríaNoemi Mery Herrera100% (1)
- Planimetria y Taquimetria 7Document4 paginiPlanimetria y Taquimetria 7Williams Durand ChavezÎncă nu există evaluări
- Informe de Topografía 2 3er NivelDocument4 paginiInforme de Topografía 2 3er NivelOmarQuerembásÎncă nu există evaluări
- Parcial TBDocument17 paginiParcial TBRoberto Oblitas PeralesÎncă nu există evaluări
- Levantamiento TopogrficoDocument21 paginiLevantamiento TopogrficoErick ALdabaÎncă nu există evaluări
- Marco TeoricoDocument43 paginiMarco TeoricoCampanil Udec Campanil100% (1)
- Ensayo - ViasDocument6 paginiEnsayo - ViasLitzy yeraldine Fiagá balagueraÎncă nu există evaluări
- Replanteo y Relevamniento Topogrfico1Document18 paginiReplanteo y Relevamniento Topogrfico1SIG DGRFÎncă nu există evaluări
- Preguntas de TopografiaDocument8 paginiPreguntas de TopografiaANDRESÎncă nu există evaluări
- Portada Normas Apa ElestudiantecomoDocument8 paginiPortada Normas Apa ElestudiantecomomauricioÎncă nu există evaluări
- P4, Nivelación TaquimetricaDocument5 paginiP4, Nivelación TaquimetricaRenzo Maurico Valle ToledoÎncă nu există evaluări
- Redes de Apoyos PlanimetricosDocument8 paginiRedes de Apoyos PlanimetricosJoel Curibanco Campos100% (1)
- Poligonal Base CerradaDocument11 paginiPoligonal Base CerradaAndrés RuedaÎncă nu există evaluări
- Informe-Levantamiento Topográfico Nueva Sede UpnDocument18 paginiInforme-Levantamiento Topográfico Nueva Sede UpnLucero Salvatierra Briones0% (1)
- Sesion 02 PDFDocument37 paginiSesion 02 PDFDennis InfanteÎncă nu există evaluări
- Levantamiento TopograficoDocument17 paginiLevantamiento TopograficoHugo Rodrigo Deudor BenaventeÎncă nu există evaluări
- Informe de Levantamiento TopográficoDocument30 paginiInforme de Levantamiento TopográficoHernán Borda DurandÎncă nu există evaluări
- TRILATERACIÓNDocument10 paginiTRILATERACIÓNMONICA MARINA RODRIGUEZ MUÑOZÎncă nu există evaluări
- Levantamiento PreliminarDocument15 paginiLevantamiento Preliminargerman100% (1)
- Levantamiento Por RadiaciónDocument12 paginiLevantamiento Por RadiaciónCueva Jara Jhon AlexanderÎncă nu există evaluări
- Fundamento de Planimetria y TaquimetriaDocument8 paginiFundamento de Planimetria y TaquimetriaCarmarys ZabalaÎncă nu există evaluări
- Nivelación TrigonométricaDocument7 paginiNivelación TrigonométricadeathÎncă nu există evaluări
- Levantamiento de Una ParcelaDocument10 paginiLevantamiento de Una ParcelakelercitoÎncă nu există evaluări
- Reporte No. 1Document24 paginiReporte No. 1Juan Jo RodriguezÎncă nu există evaluări
- Poligonal Cerrada...Document12 paginiPoligonal Cerrada...Marco JaramilloÎncă nu există evaluări
- Alineamiento en Planta de Una Carretera - FinalDocument81 paginiAlineamiento en Planta de Una Carretera - FinalAlberto Torres100% (1)
- Poligonal Base CerradaDocument28 paginiPoligonal Base CerradaFernando Antonio Rodriguez ArrietaÎncă nu există evaluări
- Informe Topo Wincha y JalonDocument12 paginiInforme Topo Wincha y JalonJuan Luis Roncal BazánÎncă nu există evaluări
- Topo TaquimetriaDocument38 paginiTopo TaquimetriaJheferson Yumbe JulcaÎncă nu există evaluări
- Levantamiento de Un Terreno Con Teodolito Por El Método de Radiación y Poligonal CerradaDocument9 paginiLevantamiento de Un Terreno Con Teodolito Por El Método de Radiación y Poligonal CerradaPercyCruzadoMontenegro100% (1)
- "Levantamiento Topográfico Por RadiaciónDocument14 pagini"Levantamiento Topográfico Por RadiaciónEurogunzReyesÎncă nu există evaluări
- Practica 1 Medicion Con CintaDocument9 paginiPractica 1 Medicion Con CintaVivian Elisa RODRIGUEZ MORENOÎncă nu există evaluări
- EscalonadoDocument7 paginiEscalonadoBecker Emerson HAÎncă nu există evaluări
- Curvas de Nivel - AplicacionesDocument29 paginiCurvas de Nivel - AplicacionesJhunior TarrilloÎncă nu există evaluări
- Etapas de Un Levantamiento TopográficoDocument21 paginiEtapas de Un Levantamiento TopográficoJordy Prado RojasÎncă nu există evaluări
- Guia de Interseccion de Visuales (Segunda Practica)Document7 paginiGuia de Interseccion de Visuales (Segunda Practica)Kendrys Cantillo DiazÎncă nu există evaluări
- TaquimetriaDocument15 paginiTaquimetriaYusmary CasrrasquelÎncă nu există evaluări
- Alineamiento en Planta de Una Carretera FinalDocument81 paginiAlineamiento en Planta de Una Carretera FinalMarky Fredy Quispe RojasÎncă nu există evaluări
- Practica Numero 3 de Topografia (Recuperado Automáticamente)Document19 paginiPractica Numero 3 de Topografia (Recuperado Automáticamente)andres marquezÎncă nu există evaluări
- Sesión 13 Método de Radiación Simple y Poligonal de Apoyo PDFDocument14 paginiSesión 13 Método de Radiación Simple y Poligonal de Apoyo PDFCarlos CruzÎncă nu există evaluări
- Topografia (Levantamiento Taquimetrico Con Teodolito Del Campo Ferial UNAS)Document8 paginiTopografia (Levantamiento Taquimetrico Con Teodolito Del Campo Ferial UNAS)Cleider Santos FloresÎncă nu există evaluări
- 2 Manual Topografia BasicaDocument23 pagini2 Manual Topografia BasicaJoseph GuerreroÎncă nu există evaluări
- 3 Levantamiento de CarreterasDocument16 pagini3 Levantamiento de CarreterasAlyson RochaÎncă nu există evaluări
- Etapas de Un Levantamiento Topográfico DTDocument21 paginiEtapas de Un Levantamiento Topográfico DTLuzmila Caballero PonteÎncă nu există evaluări
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308De la EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Încă nu există evaluări
- Interpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308De la EverandInterpretación de mapas y planos topográficos y dibujo de planos sencillos. AGAJ0308Încă nu există evaluări
- Realización de trabajos de agrimensura, nivelación simple y replanteo. AGAJ0308De la EverandRealización de trabajos de agrimensura, nivelación simple y replanteo. AGAJ0308Încă nu există evaluări
- Trazar el mapa de un bosque o campo: Diseñar fácilmente un plan 3D para un parque de atracciones, un circuito de cuerdas, una casaDe la EverandTrazar el mapa de un bosque o campo: Diseñar fácilmente un plan 3D para un parque de atracciones, un circuito de cuerdas, una casaÎncă nu există evaluări
- Dako 09 2020Document16 paginiDako 09 2020lollihopÎncă nu există evaluări
- Exposicion Final Transporte AereoDocument34 paginiExposicion Final Transporte AereolollihopÎncă nu există evaluări
- Leyes de La GetalfDocument39 paginiLeyes de La Getalflollihop100% (1)
- CineDocument4 paginiCinelollihopÎncă nu există evaluări
- Rec Eta RiosDocument13 paginiRec Eta RioslollihopÎncă nu există evaluări
- Transporte AereoDocument48 paginiTransporte AereolollihopÎncă nu există evaluări
- AnatomiaDocument16 paginiAnatomialollihopÎncă nu există evaluări
- Memoria DescriptivaDocument43 paginiMemoria DescriptivaKeila Delgado RodriguezÎncă nu există evaluări
- AAPYA2 - 7 Diseño Hidhaulico Toma Lateral PDFDocument15 paginiAAPYA2 - 7 Diseño Hidhaulico Toma Lateral PDFCristian Albino FretelÎncă nu există evaluări
- Detención de Bolivianos en ChileDocument5 paginiDetención de Bolivianos en ChilelollihopÎncă nu există evaluări
- El EmpapeladoDocument12 paginiEl EmpapeladolollihopÎncă nu există evaluări
- Capitalism oDocument2 paginiCapitalism olollihopÎncă nu există evaluări
- Equipos Industriales Petroleros - AdrianoDocument30 paginiEquipos Industriales Petroleros - AdrianolollihopÎncă nu există evaluări
- Diseño Hidrologico de EmbalsesDocument28 paginiDiseño Hidrologico de Embalseslollihop100% (1)
- Gme 02 Generacion de Modelos Estructurales 150220Document10 paginiGme 02 Generacion de Modelos Estructurales 150220lollihopÎncă nu există evaluări
- ChagasDocument14 paginiChagaslollihopÎncă nu există evaluări
- Nivel1 21Document28 paginiNivel1 21Maria Oliva Reyes SandovalÎncă nu există evaluări
- Personal I DadDocument2 paginiPersonal I DadlollihopÎncă nu există evaluări
- Cypecad Modulo I - Inf 01Document21 paginiCypecad Modulo I - Inf 01lollihopÎncă nu există evaluări
- Cementos Petroleros PET219 PDocument29 paginiCementos Petroleros PET219 PlollihopÎncă nu există evaluări
- Carretera LocalDocument5 paginiCarretera LocallollihopÎncă nu există evaluări
- Anatomia de Los Tejidos VegetalesDocument9 paginiAnatomia de Los Tejidos VegetaleslollihopÎncă nu există evaluări
- Círculo Polar ÁrticoDocument6 paginiCírculo Polar ÁrticolollihopÎncă nu există evaluări
- Borrasca PDFDocument2 paginiBorrasca PDFlollihopÎncă nu există evaluări
- Variaciones OrbitalesDocument7 paginiVariaciones OrbitaleslollihopÎncă nu există evaluări
- Círculo Polar AntárticoDocument1 paginăCírculo Polar AntárticolollihopÎncă nu există evaluări
- Sotavento y BarloventoDocument3 paginiSotavento y BarloventolollihopÎncă nu există evaluări
- Trópico de CáncerDocument3 paginiTrópico de CáncerlollihopÎncă nu există evaluări
- Círculo PolarDocument2 paginiCírculo PolarlollihopÎncă nu există evaluări
- Contra AlisioDocument1 paginăContra AlisiolollihopÎncă nu există evaluări
- REACCIONES QUIMICAS (Autoguardado) (Autoguardado) (Autoguardado)Document57 paginiREACCIONES QUIMICAS (Autoguardado) (Autoguardado) (Autoguardado)Paulina LoeÎncă nu există evaluări
- Riesgo QuimicoDocument9 paginiRiesgo QuimicojaneidyescobedoÎncă nu există evaluări
- Estilos Sin ComponentesDocument84 paginiEstilos Sin ComponentesvalerongaÎncă nu există evaluări
- Informe Lab N°3.3.3Document8 paginiInforme Lab N°3.3.3Brigite Ayala GaitanÎncă nu există evaluări
- AMAROCKDocument10 paginiAMAROCKAnonymous kyBFYD100% (1)
- Instituto Tecnológico Superior de Uruapan: "Reporte de Investigación"Document12 paginiInstituto Tecnológico Superior de Uruapan: "Reporte de Investigación"CristianÎncă nu există evaluări
- Act 12Document5 paginiAct 12AngelÎncă nu există evaluări
- Comprensión Lectora HyperloopDocument6 paginiComprensión Lectora HyperloopGabriel Benavides EscriváÎncă nu există evaluări
- Caso de Estudio Control Estadístico de ProcesosDocument3 paginiCaso de Estudio Control Estadístico de ProcesosJulian Andres Giraldo Pasaje40% (5)
- Capitulo 7 RobbinsDocument8 paginiCapitulo 7 RobbinsStephanie SmithÎncă nu există evaluări
- Selección de Equipos de Soldar para El MantenimientoDocument22 paginiSelección de Equipos de Soldar para El Mantenimientoclaudio perez prietoÎncă nu există evaluări
- Muro Cortina RevitDocument15 paginiMuro Cortina RevitCARLOSÎncă nu există evaluări
- Mmad Mmad-311 TrabajofinalDocument7 paginiMmad Mmad-311 Trabajofinalpepitooo490Încă nu există evaluări
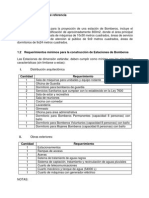
- Condiciones Mínimas de Estación de Bomberos (José Daniel)Document5 paginiCondiciones Mínimas de Estación de Bomberos (José Daniel)Yanina10100% (3)
- Indicadores BTS y DTDDocument5 paginiIndicadores BTS y DTDJuan Coasaca PortalÎncă nu există evaluări
- Plan de Aseguramiento de La Calidad PDFDocument3 paginiPlan de Aseguramiento de La Calidad PDFsoledadyanireÎncă nu există evaluări
- Gestion Empresarial CasosDocument16 paginiGestion Empresarial CasosRazzell RodriguezÎncă nu există evaluări
- Catalogo ESAB 109Document54 paginiCatalogo ESAB 109Israel Mojica MÎncă nu există evaluări
- Tarea 1. Cad Cam CaeDocument3 paginiTarea 1. Cad Cam Caelalo queraÎncă nu există evaluări
- NTC 5022Document5 paginiNTC 5022Ana Maria Rios RiosÎncă nu există evaluări
- EXPERIMENTO 5 Viscosidad de Líquidos NewtonianosDocument5 paginiEXPERIMENTO 5 Viscosidad de Líquidos Newtonianosmaubf10159407Încă nu există evaluări
- Alimentadores de Mena GruesaDocument346 paginiAlimentadores de Mena GruesaEdith RiosÎncă nu există evaluări
- Vito PlexDocument22 paginiVito PlexSCRIBD111111MIGUELÎncă nu există evaluări
- La Biblia de Las Curvas 1Document4 paginiLa Biblia de Las Curvas 1JaimeDiazDiazÎncă nu există evaluări
- IGME Panorama Minero 2016 CaolinDocument17 paginiIGME Panorama Minero 2016 CaolinEncarnacionMorenaGarciaÎncă nu există evaluări
- Procedimiento para CandadeoDocument7 paginiProcedimiento para CandadeodocumentossafÎncă nu există evaluări
- Herramientas Case para Base de DatosDocument69 paginiHerramientas Case para Base de DatosAriamgelÎncă nu există evaluări
- TP 4 ReaccionesDocument2 paginiTP 4 ReaccionesStella Maris50% (2)
- Informe Mejora de ProcesosDocument10 paginiInforme Mejora de ProcesosIvan OrtizÎncă nu există evaluări
- Laboratorio Estado Integral de Costos Sesión 6Document6 paginiLaboratorio Estado Integral de Costos Sesión 6joshua mendozaÎncă nu există evaluări