S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- E-Bike ReportDocument29 paginiE-Bike ReportUnais KK0% (1)
- Car ComparisonDocument4 paginiCar Comparisonapi-510040628Încă nu există evaluări
- Resume K.R.Naveen Kumar: ObjectiveDocument2 paginiResume K.R.Naveen Kumar: ObjectiveNaveen IdxÎncă nu există evaluări
- GDFGFFFFFFFFFDocument2 paginiGDFGFFFFFFFFFNaveen IdxÎncă nu există evaluări
- SABARI2Document2 paginiSABARI2Naveen IdxÎncă nu există evaluări
- Stockist Claims: Date Customer Product Qty Free ClaimDocument1 paginăStockist Claims: Date Customer Product Qty Free ClaimNaveen IdxÎncă nu există evaluări
- Java AnsDocument35 paginiJava AnsNaveen IdxÎncă nu există evaluări
- Prevention of Energy CrisisDocument3 paginiPrevention of Energy CrisisNaveen IdxÎncă nu există evaluări
- Temperate Forest & AnimalsDocument9 paginiTemperate Forest & AnimalsNaveen IdxÎncă nu există evaluări
- Software Engineering - Unit - 1Document22 paginiSoftware Engineering - Unit - 1Naveen IdxÎncă nu există evaluări
- Token Rings (802.5)Document26 paginiToken Rings (802.5)Naveen IdxÎncă nu există evaluări
- 4532 DualBootDocument6 pagini4532 DualBootNaveen IdxÎncă nu există evaluări
- RMBDocument2 paginiRMBNaveen IdxÎncă nu există evaluări
- Hybrid Electric Vehicles (HEV) : Ashutosh DwibediDocument14 paginiHybrid Electric Vehicles (HEV) : Ashutosh DwibediDev KumarÎncă nu există evaluări
- Ford Ranger 2011.50MY Body Repair Manual 2011 2019Document566 paginiFord Ranger 2011.50MY Body Repair Manual 2011 2019Poksu LieyÎncă nu există evaluări
- Truck Hub and Insert UnitsDocument21 paginiTruck Hub and Insert UnitsOlivier ORMANÎncă nu există evaluări
- ToyotaDocument2 paginiToyotaDelvara DayyanuÎncă nu există evaluări
- Regenerative Braking SystemDocument27 paginiRegenerative Braking SystemPallav SharmaÎncă nu există evaluări
- COMPUTER DATA LINES - Nissan Murano SL 2007 - SYSTEM WIRING DIAGRAMSDocument1 paginăCOMPUTER DATA LINES - Nissan Murano SL 2007 - SYSTEM WIRING DIAGRAMSMatias MarisioÎncă nu există evaluări
- HybridDocument4 paginiHybridVignesh AsokÎncă nu există evaluări
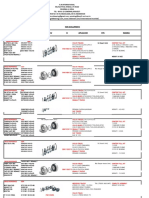
- Japanparts Eco Fuel Filters FC-ECODocument7 paginiJapanparts Eco Fuel Filters FC-ECOPopa DanielÎncă nu există evaluări
- 1.0 PM (IPte) Innova Zenix Price List 1Document1 pagină1.0 PM (IPte) Innova Zenix Price List 1Loo Hui LianÎncă nu există evaluări
- Squarell Installation Instructions - Light Commercial Vehicles - 201228Document114 paginiSquarell Installation Instructions - Light Commercial Vehicles - 201228andreaviligiardiÎncă nu există evaluări
- Mercedes-Maybach GLS 600 4MATIC+ BrochureDocument19 paginiMercedes-Maybach GLS 600 4MATIC+ Brochuretuntaz.ardiaÎncă nu există evaluări
- Volvo FinalDocument9 paginiVolvo FinalDhayanidhi NidhiÎncă nu există evaluări
- Lista de Precios Marca EWIG Al 16-11-21Document12 paginiLista de Precios Marca EWIG Al 16-11-21larry gonzalezÎncă nu există evaluări
- Pricelist NewmeganeDocument5 paginiPricelist NewmeganeMilun MarkovicÎncă nu există evaluări
- Perspectives On The Use of Advanced Nuclear Energy Systems For New Energy VehiclesDocument6 paginiPerspectives On The Use of Advanced Nuclear Energy Systems For New Energy VehiclesfemiÎncă nu există evaluări
- 520d WBA5N21010G267461: Generated On Https://bimmer - WorkDocument4 pagini520d WBA5N21010G267461: Generated On Https://bimmer - WorkjurjitoÎncă nu există evaluări
- Providers Accredited Dealers: List May Change Without Prior NoticeDocument13 paginiProviders Accredited Dealers: List May Change Without Prior NoticeJessicaWangÎncă nu există evaluări
- eMobilityReport MarketInsights&DataAnalysisDocument219 paginieMobilityReport MarketInsights&DataAnalysisShivam Rustagi100% (1)
- Mitsubishi I-Miev Isolation ProcedureDocument15 paginiMitsubishi I-Miev Isolation ProcedureJamaluddin SaatÎncă nu există evaluări
- Fluidos ZFDocument8 paginiFluidos ZFFabrizioÎncă nu există evaluări
- Bloques Importados Incolbes1Document1 paginăBloques Importados Incolbes1Henry HernandezÎncă nu există evaluări
- UntitledDocument54 paginiUntitledPrakash PrakashÎncă nu există evaluări
- 2018 ParcautopublicatDocument17.061 pagini2018 ParcautopublicatJuly AnneÎncă nu există evaluări
- Alpak Induction MotorsDocument38 paginiAlpak Induction Motorsd3xterÎncă nu există evaluări
- California Covering 3Q 22 FINALDocument8 paginiCalifornia Covering 3Q 22 FINALSimon AlvarezÎncă nu există evaluări
- Retrobvisores AlemanesDocument180 paginiRetrobvisores AlemanesFredy Hernan Sam ChocÎncă nu există evaluări
- Promoção Nov 2023Document2 paginiPromoção Nov 2023contatoÎncă nu există evaluări
- Clutch Booster Japanese Commercial VehiclesDocument12 paginiClutch Booster Japanese Commercial VehiclesferÎncă nu există evaluări